You might also like
- Refinery Power OutageDocument16 pagesRefinery Power Outagepradeep.spaceman100% (2)
- Motor Winding ProcedureDocument25 pagesMotor Winding Procedureutility supplyNo ratings yet
- PFC ConverterDocument17 pagesPFC ConverterSandeep Guha NiyogiNo ratings yet
- Course Plan-Power ElectronicsDocument5 pagesCourse Plan-Power ElectronicsNarasimman DonNo ratings yet
- Bridgeless AC-DC Buck-Boost Converter WithDocument5 pagesBridgeless AC-DC Buck-Boost Converter WithJishnu VenugopalNo ratings yet
- 10 InvertersDocument136 pages10 InverterszapzahtNo ratings yet
- Buck PFCDocument37 pagesBuck PFCranjitheee1292No ratings yet
- Design of PV System With Double Boost ConverterDocument53 pagesDesign of PV System With Double Boost ConverterBalamurugan100% (1)
- Using The SG3525 PWM ControllerDocument7 pagesUsing The SG3525 PWM ControllerjaigodaraNo ratings yet
- DESIGN AND CONSTRUCTION OF 5KVA INVERTER Electrical Engineering Projec...Document12 pagesDESIGN AND CONSTRUCTION OF 5KVA INVERTER Electrical Engineering Projec...Peter D.No ratings yet
- A Study On Insulation Coordination of A Wind Turbine Generator System and A Distribution LineDocument6 pagesA Study On Insulation Coordination of A Wind Turbine Generator System and A Distribution Linejomoran100% (1)
- Synchronous GeneratorDocument2 pagesSynchronous GeneratorBrandon LoweNo ratings yet
- Power Factor CorrectionDocument48 pagesPower Factor Correctionskaarz86% (7)
- Three Phase Induction Motors: Output Equation of Induction MotorDocument7 pagesThree Phase Induction Motors: Output Equation of Induction MotoraaparumugamNo ratings yet
- PFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-EnDocument31 pagesPFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-Enkik020No ratings yet
- Volume Iii - 30mva Transformers PDFDocument117 pagesVolume Iii - 30mva Transformers PDFSunil G ParakkalNo ratings yet
- Biricha Digital Power LTDDocument11 pagesBiricha Digital Power LTDcolletonNo ratings yet
- Solar InvereterDocument47 pagesSolar InvereterReshma RaviNo ratings yet
- Synchronous Generator PART ADocument34 pagesSynchronous Generator PART Apayal100% (1)
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- 2008 28 Autumn Wiring Matters Appendix 4Document5 pages2008 28 Autumn Wiring Matters Appendix 4Ty PhanNo ratings yet
- 3 Phase Full Wave Bridge ConverterDocument55 pages3 Phase Full Wave Bridge ConvertersubhasishpodderNo ratings yet
- Parts Manual: Generator SetDocument60 pagesParts Manual: Generator SetAnderson PioNo ratings yet
- A N O PV:: Pplication OTE Ptimal Cable Sizing in Systems Case StudyDocument19 pagesA N O PV:: Pplication OTE Ptimal Cable Sizing in Systems Case Studyacsbaltazar4474No ratings yet
- IsolatorsDocument12 pagesIsolatorsmichol2014No ratings yet
- Effects of Harmonics On Induction MotorsDocument5 pagesEffects of Harmonics On Induction Motorsrbargallo0No ratings yet
- A Study On MOSFET Gate Driver CircuitDocument7 pagesA Study On MOSFET Gate Driver CircuitPham Viet QuanNo ratings yet
- Time Current Coordination CurvesDocument2 pagesTime Current Coordination Curvesrambala123100% (1)
- Design of A Non-Ideal Buck ConverterDocument13 pagesDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Learn How To Design A High-Frequency Power Transformer Using Forward TopologyDocument3 pagesLearn How To Design A High-Frequency Power Transformer Using Forward TopologyNiranjan kumarNo ratings yet
- Micom P120, P121, P122 & P123: Overcurrent Relays P12X/En T/Gd6Document549 pagesMicom P120, P121, P122 & P123: Overcurrent Relays P12X/En T/Gd6Aris van RaiserNo ratings yet
- MV/LV Transformer Protection: Power Business TrainingDocument56 pagesMV/LV Transformer Protection: Power Business Trainingsani priadiNo ratings yet
- Static Var CompensatorDocument29 pagesStatic Var CompensatorCarlos Fabian GallardoNo ratings yet
- 6Document23 pages6api-3854942100% (1)
- Advanced Power System UNIT II - Part 1 of 2Document53 pagesAdvanced Power System UNIT II - Part 1 of 2Jäšïm Üśmäñï100% (1)
- Doubly Fed Induction GeneratorDocument8 pagesDoubly Fed Induction GeneratorMashood NasirNo ratings yet
- Project ReportDocument8 pagesProject Reportسید کاظمی100% (1)
- Two - Switch Buck - Boost DC-DC Converter-ProjectDocument28 pagesTwo - Switch Buck - Boost DC-DC Converter-ProjectKEERTHY SNo ratings yet
- Britannia JointDocument2 pagesBritannia JointprashantNo ratings yet
- The Grid CodeDocument206 pagesThe Grid CodeIulianNo ratings yet
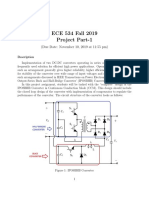
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- Cable Sizing CalculationDocument3 pagesCable Sizing CalculationAbdullah Al Asik100% (1)
- Chapter 7 Harmonics Part 2Document37 pagesChapter 7 Harmonics Part 2Venkata GullapudiNo ratings yet
- Arduino Power Inverter CircuitsDocument8 pagesArduino Power Inverter CircuitsjuliocastNo ratings yet
- Electric GeneratorDocument7 pagesElectric GeneratorRahul Shivu100% (1)
- Chapter 1 DC Drives Part2Document75 pagesChapter 1 DC Drives Part2Mohammad MunzirNo ratings yet
- Schunk Carbon-Brush Brush PressureDocument8 pagesSchunk Carbon-Brush Brush PressurePrittam Kumar JenaNo ratings yet
- Automatic Power Factor Controller Using Microcontroller PDFDocument5 pagesAutomatic Power Factor Controller Using Microcontroller PDFthangarajelectresNo ratings yet
- Manual 3kW Off Grid VX Solar Inverter 120702Document33 pagesManual 3kW Off Grid VX Solar Inverter 120702Stefan ArseneNo ratings yet
- Electrical Machines:: TransformersDocument76 pagesElectrical Machines:: TransformersHari HaranNo ratings yet
- Power Factor CorrectionDocument43 pagesPower Factor Correctionravirnjn88No ratings yet
- Syncronous DQ PV Grid ControlDocument95 pagesSyncronous DQ PV Grid ControlAlex RochaNo ratings yet
- DC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Document5 pagesDC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Branislav TanevskiNo ratings yet
- Exp 9 Boost ConverterDocument8 pagesExp 9 Boost ConverterusmpowerlabNo ratings yet
- Calculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFDocument8 pagesCalculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFYUVA SKILL ACENo ratings yet
- Group-3 - (Battery Charging Circuit Using SCR)Document15 pagesGroup-3 - (Battery Charging Circuit Using SCR)Nayem IslamNo ratings yet
- 1 Boost - Design (Assign 1)Document1 page1 Boost - Design (Assign 1)deivasigamaniNo ratings yet
- MatiurehmanDocument22 pagesMatiurehmanmuhammad kaunain khanNo ratings yet
- Power Electronic Inverter - ReportDocument9 pagesPower Electronic Inverter - ReportPrateek AgarwalNo ratings yet
- Dehn Prenaponska ZaštitaDocument383 pagesDehn Prenaponska ZaštitaMilica LolićNo ratings yet
- Rewind Motor BrushlessDocument11 pagesRewind Motor Brushlesssharingiscaring69No ratings yet
- Cuk, Sepic Zeta NptelDocument20 pagesCuk, Sepic Zeta NptelAvinash Babu KmNo ratings yet
- No Load Test: ObjectiveDocument5 pagesNo Load Test: ObjectiveyashNo ratings yet
- An 42047 PDFDocument13 pagesAn 42047 PDFM HasanNo ratings yet
- 502ag0207 Designing A SEPIC ConverterDocument9 pages502ag0207 Designing A SEPIC Converterempeeno1No ratings yet
- Datasheet Dyn11 800kVA 60hzDocument1 pageDatasheet Dyn11 800kVA 60hzManuel LombarderoNo ratings yet
- Agus BWDocument3 pagesAgus BWSuhedi SapinNo ratings yet
- High Voltage Termination (HVT-Z) : For Shielded CablesDocument2 pagesHigh Voltage Termination (HVT-Z) : For Shielded CablesGiovany Vargas QuirozNo ratings yet
- Pec 2Document22 pagesPec 2Jannes Vega100% (1)
- Cea Notes For Mining 513Document22 pagesCea Notes For Mining 513Vivek AgarwalNo ratings yet
- Manual Sivacon 8ps Planning With Sivacon 8ps en-GBDocument296 pagesManual Sivacon 8ps Planning With Sivacon 8ps en-GBAbez Five100% (1)
- DC Motor ChartsDocument8 pagesDC Motor ChartsMeredith M. AndersonNo ratings yet
- N2XY 1core - PRYSMIANDocument2 pagesN2XY 1core - PRYSMIANhenry_gtNo ratings yet
- Hydrolink Engineering Equipment Company (PVT) LTD.: - Applied Voltage TestDocument2 pagesHydrolink Engineering Equipment Company (PVT) LTD.: - Applied Voltage TestFahadNo ratings yet
- 205 Us 001Document9 pages205 Us 001DARIONo ratings yet
- IEC 60898-1 and IEC 60947-2 - A Tale of Two Standards - What The DifferenceDocument3 pagesIEC 60898-1 and IEC 60947-2 - A Tale of Two Standards - What The DifferenceknsbNo ratings yet
- L07 DC and AC Load LineDocument21 pagesL07 DC and AC Load LineDebashish Pal100% (1)
- CR 513 AfgjaehqqeDocument2 pagesCR 513 AfgjaehqqeSuryansah MNo ratings yet
- L1-CHE-STD-015 Electrical Networks Standard Electrical Networks Principles and PerformanceDocument17 pagesL1-CHE-STD-015 Electrical Networks Standard Electrical Networks Principles and PerformanceCK TangNo ratings yet
- NYRY 1core PVC AWA PVCDocument5 pagesNYRY 1core PVC AWA PVCYulian Dea ZollaNo ratings yet
- Standards For Low Voltage Embedded GenerationDocument26 pagesStandards For Low Voltage Embedded GenerationCliffNo ratings yet
- NYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1Document1 pageNYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1eplan drawingsNo ratings yet
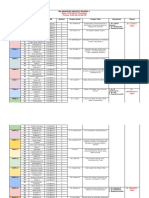
- Team No. Sl. No. Name of Student USN Section Project Guide Project Title Reviewers VenueDocument4 pagesTeam No. Sl. No. Name of Student USN Section Project Guide Project Title Reviewers Venuekurdso kurizNo ratings yet
- EECE370 Q2 F11 Key PostDocument7 pagesEECE370 Q2 F11 Key PosttelNo ratings yet
- Cooper - RFQ #Smoke and Heat TestersDocument1 pageCooper - RFQ #Smoke and Heat TestersSamir AjiNo ratings yet
- STEG Design 2022-07-11 Versió OriolDocument11 pagesSTEG Design 2022-07-11 Versió OriolJoanSallerasNo ratings yet
- Checklist For Mobile Diesel Generator Set OperationDocument2 pagesChecklist For Mobile Diesel Generator Set Operationdewan079650No ratings yet