You might also like
- HVP-20 ErrosDocument27 pagesHVP-20 ErrosAlan Alexandre100% (2)
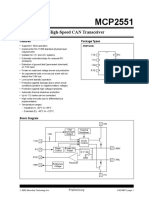
- High-Speed CAN Transceiver: Features Package TypesDocument23 pagesHigh-Speed CAN Transceiver: Features Package TypesSe SavNo ratings yet
- MCP 2551Document20 pagesMCP 2551Duy KhaNo ratings yet
- High-Speed CAN Transceiver: Features Package TypesDocument24 pagesHigh-Speed CAN Transceiver: Features Package TypeswhcallegariNo ratings yet
- MCP 2561Document30 pagesMCP 2561ZaegorNo ratings yet
- Multi-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesDocument14 pagesMulti-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesTeles SilvaNo ratings yet
- Max 14866Document23 pagesMax 14866hibluedeerNo ratings yet
- Max 7032Document32 pagesMax 7032vcdNo ratings yet
- Can Driver Ram 2005 Ecus Marco EsteliDocument27 pagesCan Driver Ram 2005 Ecus Marco EsteliautocomputerNo ratings yet
- Tja1040t PDFDocument18 pagesTja1040t PDF81968No ratings yet
- Can Transceiver: FeaturesDocument19 pagesCan Transceiver: FeaturesSukandar TeaNo ratings yet
- Can Transceiver: FeaturesDocument19 pagesCan Transceiver: Featuresjose luisNo ratings yet
- AND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Document19 pagesAND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Jonatan LunaNo ratings yet
- Lecture5 Ee720 Termination Txdriver PDFDocument41 pagesLecture5 Ee720 Termination Txdriver PDFMohamed MegahedNo ratings yet
- Max 8729Document26 pagesMax 8729lagreta55No ratings yet
- Types of PsuDocument50 pagesTypes of PsusubhajitNo ratings yet
- Max 11100Document21 pagesMax 11100Om VermaNo ratings yet
- Features Descriptio: Ltc3717-1 Wide Operating Range, Nor Step-Down Controller For DDR/QDR Memory TerminationDocument20 pagesFeatures Descriptio: Ltc3717-1 Wide Operating Range, Nor Step-Down Controller For DDR/QDR Memory TerminationQuartey NiiNo ratings yet
- MAX2411ADocument14 pagesMAX2411AalperencoskunNo ratings yet
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDocument8 pagesDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisNo ratings yet
- A82C251Document16 pagesA82C251el_george0079491No ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2Document17 pagesRF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2mohsengsmNo ratings yet
- MAX16816Document1 pageMAX16816zazanu2003No ratings yet
- A82C250Document20 pagesA82C250AdamNo ratings yet
- ECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer CircuitsDocument66 pagesECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer Circuits陈晨No ratings yet
- LIN Transceiver: Automotive and IndustrialDocument19 pagesLIN Transceiver: Automotive and IndustrialRayan88No ratings yet
- Multi-Output Power Supplies With Vcom Amplifier and High-Voltage Gamma Reference For LCD Tvs Max17126BDocument34 pagesMulti-Output Power Supplies With Vcom Amplifier and High-Voltage Gamma Reference For LCD Tvs Max17126BFrank GomezNo ratings yet
- Tja 1040Document22 pagesTja 1040AlainbravopaezNo ratings yet
- Data Sheet: High Speed CAN TransceiverDocument17 pagesData Sheet: High Speed CAN TransceiverGautam PrashantNo ratings yet
- CAN Interface: Prototype InformationDocument8 pagesCAN Interface: Prototype InformationjahenNo ratings yet
- Max15058 PDFDocument22 pagesMax15058 PDFjhnkerenNo ratings yet
- CANDocument9 pagesCANOscar AlizaresNo ratings yet
- mcp4725 PDFDocument50 pagesmcp4725 PDFGessa BulaongNo ratings yet
- Driving LVPECL, LVDS, CML and SSTL Logic With IDT's "Universal" Low-Power HCSL OutDocument14 pagesDriving LVPECL, LVDS, CML and SSTL Logic With IDT's "Universal" Low-Power HCSL Outtian yuNo ratings yet
- Tja1041 PDFDocument26 pagesTja1041 PDFKeno0No ratings yet
- LM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationDocument24 pagesLM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationcsclzNo ratings yet
- RFM12B: RFM12B Universal Ism Band FSK Transceiver ModuleDocument10 pagesRFM12B: RFM12B Universal Ism Band FSK Transceiver ModuleAMIR GHASEMINo ratings yet
- 1 General Description: Power Management IC For Low-Power Microcontroller ApplicationsDocument76 pages1 General Description: Power Management IC For Low-Power Microcontroller ApplicationsPham Ton VuNo ratings yet
- SN65HVD1050DR Texas InstrumentsDocument21 pagesSN65HVD1050DR Texas InstrumentsMoises HernandezNo ratings yet
- Tja1042 1Document27 pagesTja1042 1TOYS SQUARENo ratings yet
- Cargador Enercell cr623xDocument11 pagesCargador Enercell cr623xcuco777No ratings yet
- MAX4238-MAX4239 - AmplificadorDocument10 pagesMAX4238-MAX4239 - AmplificadorJeferson FraytagNo ratings yet
- Str-x6759n Ds enDocument9 pagesStr-x6759n Ds enCleiton SilvaNo ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1Document19 pagesRF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1bulli babuNo ratings yet
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDocument8 pages12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNo ratings yet
- DS2482 100-3122386Document25 pagesDS2482 100-3122386Victor Manuel Vasquez CardonaNo ratings yet
- Lin Bus Transceiver: 1 FeaturesDocument14 pagesLin Bus Transceiver: 1 FeaturesDan EsentherNo ratings yet
- Can Transceiver: Features DescriptionDocument20 pagesCan Transceiver: Features Descriptionies837No ratings yet
- AC-DC LED Driver MT7930Document8 pagesAC-DC LED Driver MT7930Daniel GonzálezNo ratings yet
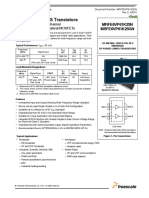
- RF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNDocument22 pagesRF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNISMAEL ALVEZNo ratings yet
- RF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNDocument22 pagesRF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNASNANNo ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- 921 MHZ - 960 MHZ Sifet RF Integrated Power Amplifier: Mhvic910Hr2Document11 pages921 MHZ - 960 MHZ Sifet RF Integrated Power Amplifier: Mhvic910Hr2Claudinei FigueiraNo ratings yet
- Finisar ftlx6672mcc 10g DWDM 40km Multi-Rate T-SFP Optical Transceiver Product Spec Reva02Document15 pagesFinisar ftlx6672mcc 10g DWDM 40km Multi-Rate T-SFP Optical Transceiver Product Spec Reva02Lelik GhhNo ratings yet
- LM2825 Integrated Power Supply 1A DC-DC Converter: General Description FeaturesDocument12 pagesLM2825 Integrated Power Supply 1A DC-DC Converter: General Description FeaturesSorin AlexandruNo ratings yet
- 2.7V Dual Channel 10-Bit A/D Converter With SPI Serial InterfaceDocument34 pages2.7V Dual Channel 10-Bit A/D Converter With SPI Serial InterfaceVed Shekhar GowdaNo ratings yet
- APW8868C: Features General DescriptionDocument26 pagesAPW8868C: Features General DescriptionFelix BlancoNo ratings yet
- LM6172 Dual High Speed, Low Power, Low Distortion, Voltage Feedback AmplifiersDocument16 pagesLM6172 Dual High Speed, Low Power, Low Distortion, Voltage Feedback AmplifiersGerasymNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- BOQ For Laboratory Equipment'sDocument13 pagesBOQ For Laboratory Equipment'sShibru Tefera BlataNo ratings yet
- IS3000 and DT8000 Series Data SheetDocument2 pagesIS3000 and DT8000 Series Data Sheetyaisel valeroNo ratings yet
- Abirami, Bala, Priya - 2014 - Design of BLDC Hub Motor Using FEM AnalysisDocument6 pagesAbirami, Bala, Priya - 2014 - Design of BLDC Hub Motor Using FEM Analysismitul100% (1)
- Introduction To CMOS RF Integrated Circuits Design: III. Low Noise AmplifiersDocument44 pagesIntroduction To CMOS RF Integrated Circuits Design: III. Low Noise AmplifiersKareem AhmedNo ratings yet
- Manuel S. Enverga University FoundationDocument4 pagesManuel S. Enverga University FoundationIecep Quezon Province ChapterNo ratings yet
- Objective:: Analog Electronics LabDocument7 pagesObjective:: Analog Electronics LabvikkingNo ratings yet
- Coulmometric Methods: Presentation by Farlane Mtisi Fortune Donga Mansfield S.MutyandaDocument40 pagesCoulmometric Methods: Presentation by Farlane Mtisi Fortune Donga Mansfield S.MutyandaIrvinn NhutsNo ratings yet
- ATEX Directive 94/9/EC - : European DirectivesDocument6 pagesATEX Directive 94/9/EC - : European DirectivesIrfan SyukranNo ratings yet
- Electron ArrangementDocument35 pagesElectron ArrangementMyca Antonette Yza CordovaNo ratings yet
- Explanation of Auto Transformer With Circuit DiagramDocument5 pagesExplanation of Auto Transformer With Circuit DiagramRobin ChadhaNo ratings yet
- Drive Spares Old PDFDocument3 pagesDrive Spares Old PDFmiguel angel vanegas medinaNo ratings yet
- 45W Triple Output Medical Type: SeriesDocument2 pages45W Triple Output Medical Type: SeriestawfikNo ratings yet
- Image Sensor Kmpd0002eDocument52 pagesImage Sensor Kmpd0002eLakmal GayanNo ratings yet
- Small Device Prevents Diode DeathDocument1 pageSmall Device Prevents Diode DeathWilliam BennerNo ratings yet
- New Report ON GSSDocument40 pagesNew Report ON GSSPadmakshiNo ratings yet
- RF 3920 CHK PDFDocument10 pagesRF 3920 CHK PDFPablo ParedesNo ratings yet
- Gas Draft of White PaperDocument3 pagesGas Draft of White Paperharshpatel18No ratings yet
- Guard I/O Ethernet/Ip Safety Modules: 1791Es-Ib8Xobv4, 1791Es-Ib16Document108 pagesGuard I/O Ethernet/Ip Safety Modules: 1791Es-Ib8Xobv4, 1791Es-Ib16jesusortegavNo ratings yet
- Transistors Diodes Led & ETCDocument98 pagesTransistors Diodes Led & ETCSelvanNo ratings yet
- Vehicle Health Monitoring System Using ARDUINO and IOTDocument3 pagesVehicle Health Monitoring System Using ARDUINO and IOTEditor IJRITCCNo ratings yet
- ProductDocument25 pagesProductRaviNo ratings yet
- NECP05 CommentsDocument263 pagesNECP05 Commentsjturner170No ratings yet
- Beijing Quanxin Ultrasonic CO.,LTD: More Information of Ultrasonic TransducerDocument4 pagesBeijing Quanxin Ultrasonic CO.,LTD: More Information of Ultrasonic TransducerbG gNo ratings yet
- Duracell Coppertop 9VDocument2 pagesDuracell Coppertop 9VkimbeemanNo ratings yet
- Fundamentals of The Automotive Relative Compression Test: General DescriptionDocument4 pagesFundamentals of The Automotive Relative Compression Test: General DescriptionIvoo ooNo ratings yet
- MR1 9e en Calibrador PDFDocument4 pagesMR1 9e en Calibrador PDFMauro Ferreira De LimaNo ratings yet
- Design Techniques For EMC CompleteDocument156 pagesDesign Techniques For EMC Completec_rodolfo_rodrigues5109No ratings yet
- Visvesvaraya National Institute of Technology Nagpur: Vlsi Design MTECH 2021-23 Nano LabDocument9 pagesVisvesvaraya National Institute of Technology Nagpur: Vlsi Design MTECH 2021-23 Nano LabRutvik PatelNo ratings yet
- Electric Protective System Wiring Diagrams: Component Abbreviations (REF 5N360)Document11 pagesElectric Protective System Wiring Diagrams: Component Abbreviations (REF 5N360)ali0% (1)