You might also like
- Ascendant CalculationDocument14 pagesAscendant CalculationDvs Ramesh100% (1)
- Synchronous Generator Operating ChartDocument4 pagesSynchronous Generator Operating Chartp41005679100% (1)
- شرح مخطط كارنوفDocument65 pagesشرح مخطط كارنوفzoherofNo ratings yet
- MH Alshaya Interview Questions For General InterviewDocument2 pagesMH Alshaya Interview Questions For General Interviewmohnish_h0% (1)
- ABB 3wdg TRAFO Data SheetDocument2 pagesABB 3wdg TRAFO Data SheetKunik SwaroopNo ratings yet
- VVVF - Working Principle & Its OperationDocument18 pagesVVVF - Working Principle & Its Operationdownload4sumitNo ratings yet
- E1 - Controlled Rectifiers PDFDocument92 pagesE1 - Controlled Rectifiers PDFmitulNo ratings yet
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- E.T.E. 3 Phase Transformer InfoDocument9 pagesE.T.E. 3 Phase Transformer InfoSanjay VermaNo ratings yet
- EE 010 402 DC Machines and TransformersDocument2 pagesEE 010 402 DC Machines and TransformersResmara ShajahanNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Lecture 7 - Synchronous Generators 7 PDFDocument28 pagesLecture 7 - Synchronous Generators 7 PDFDorwinNeroNo ratings yet
- PSIM MANUAL For StudentsDocument23 pagesPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Problem Set 1Document9 pagesProblem Set 1jerry tranNo ratings yet
- EMEDDocument128 pagesEMEDAYŞEGÜLNo ratings yet
- 6 - Dynamic Model of The Induction MotorDocument11 pages6 - Dynamic Model of The Induction MotorQuynh tran100% (2)
- SMPC NotesDocument98 pagesSMPC NotesHarsha Anantwar100% (1)
- Industrial DrivesDocument1 pageIndustrial DrivesSatish NurukurthiNo ratings yet
- Reference BooksDocument3 pagesReference BooksAmitabhaNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Part BDocument10 pagesPart BVenkat ManiNo ratings yet
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- Electric Drives and Control: Classes of Motor DutyDocument12 pagesElectric Drives and Control: Classes of Motor DutyAnonymous xaeuoo4No ratings yet
- Double Cage Rotor of An Induction MotorDocument2 pagesDouble Cage Rotor of An Induction Motorsalma100% (1)
- BLDC MotorDocument8 pagesBLDC MotorMahlet MelesseNo ratings yet
- Final Assignment EEE 111Document3 pagesFinal Assignment EEE 111Ahmed RakibNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Switched Reluctance Reluctance Motors and ControlDocument47 pagesSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Synchronous Machine ProblemsDocument5 pagesSynchronous Machine Problemsbhuvana71No ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- EE2403 Special Electrical MachinesDocument19 pagesEE2403 Special Electrical MachinesvasanthavananNo ratings yet
- Stepper Motor and DrivesDocument8 pagesStepper Motor and DrivesLasantha Abeykoon100% (2)
- Lecture 6 - Induction MotorsDocument34 pagesLecture 6 - Induction Motorsswamy_satya20004521No ratings yet
- Permanent Magnet Brushless DC MotorDocument18 pagesPermanent Magnet Brushless DC MotorBala SubramanianNo ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- Ssemd PPT1Document205 pagesSsemd PPT1control 4uonlyNo ratings yet
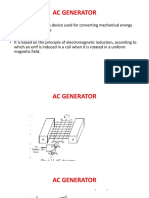
- AC GeneratorDocument37 pagesAC GeneratorS. Dinesh KumarNo ratings yet
- Week 71Document25 pagesWeek 71Raphael SebucNo ratings yet
- EPEG302-Induction GeneratorDocument31 pagesEPEG302-Induction GeneratorTOny R.CNo ratings yet
- Tutorial IGBT and MOSFET Loss Calculation in The Thermal ModuleDocument17 pagesTutorial IGBT and MOSFET Loss Calculation in The Thermal ModulemanojNo ratings yet
- Three Phase MeasurementDocument26 pagesThree Phase MeasurementAnjanaNo ratings yet
- 08 - AC Generators (64 Slides - 2 WK)Document64 pages08 - AC Generators (64 Slides - 2 WK)Syed SyaqireinNo ratings yet
- Chapter 1 Current GenerationDocument49 pagesChapter 1 Current GenerationThe zeroNo ratings yet
- Power Electronics LabDocument15 pagesPower Electronics LabSaimraeen ThereNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
- BLPM DCM - Unit IVDocument41 pagesBLPM DCM - Unit IVpviveknaiduNo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous Machinesramkiran1989100% (1)
- DC MachinesDocument126 pagesDC MachinesAfaf EmadNo ratings yet
- DC Machines PresentationDocument66 pagesDC Machines PresentationMarcos AquinoNo ratings yet
- Speed ControllersDocument8 pagesSpeed ControllersJeevahan SivalingamNo ratings yet
- Preface: Speed Control of DC Motor Using PWM By-Yash DoshiDocument11 pagesPreface: Speed Control of DC Motor Using PWM By-Yash Doshirochmat100% (1)
- Stepping Motor Control CircuitsDocument9 pagesStepping Motor Control CircuitsrfcbaccaratNo ratings yet
- BLDC ControlDocument16 pagesBLDC ControlSaurabh DashNo ratings yet
- SSCM1023 Chap 1 PolarDocument22 pagesSSCM1023 Chap 1 Polarbarre PenroseNo ratings yet
- Emotion Detection of Autistic Children Using Support Vector Machine: A ReviewDocument4 pagesEmotion Detection of Autistic Children Using Support Vector Machine: A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Shed Type Structures - Steel Vs Bamboo: Mini Project Report OnDocument33 pagesShed Type Structures - Steel Vs Bamboo: Mini Project Report OnSaravanan Silamban100% (2)
- CDC 13633DS1Document248 pagesCDC 13633DS1SaadAliNo ratings yet
- CFDDDocument41 pagesCFDDvsputhamanNo ratings yet
- 10wizard PDFDocument24 pages10wizard PDFPaula LagoNo ratings yet
- Foundation of Digital GovermentDocument17 pagesFoundation of Digital Govermentizal005No ratings yet
- A Project Report On Setting Up A Pen FactoryDocument18 pagesA Project Report On Setting Up A Pen FactoryAnupriya BediNo ratings yet
- Niir Complete Book On Rubber Processing Compounding Technology With Machinery Details 2nd Revised EditionDocument13 pagesNiir Complete Book On Rubber Processing Compounding Technology With Machinery Details 2nd Revised EditionMarcoNo ratings yet
- Gender and Sexuality in Popular FictionDocument19 pagesGender and Sexuality in Popular FictionJacksonNo ratings yet
- TP18 327Document5 pagesTP18 327soporteNo ratings yet
- Definition of LiberalizationDocument5 pagesDefinition of LiberalizationFiles DownloadNo ratings yet
- TsinghuaDocument46 pagesTsinghuabrendan lanzaNo ratings yet
- Nachingwea Nickel Project, Tanzania: Research ProposalDocument6 pagesNachingwea Nickel Project, Tanzania: Research ProposalRozalia PengoNo ratings yet
- 24 - Comprehension PassageDocument3 pages24 - Comprehension PassageMichael TateNo ratings yet
- Anthony PDFDocument33 pagesAnthony PDFQuang ThangNo ratings yet
- New For Pole Line Hardware Superior Corrosion Resistant OptionsDocument1 pageNew For Pole Line Hardware Superior Corrosion Resistant OptionsWency JavateNo ratings yet
- McWilliams Center For Counseling, Inc. Community Support Office - 438Document2 pagesMcWilliams Center For Counseling, Inc. Community Support Office - 438James BennettNo ratings yet
- Sap CodesDocument4 pagesSap CodesInfoseek Web DevelopmentNo ratings yet
- L1 - 34241 - en - B - UV 420 TTR-C H4 - Pul - en - hb5Document1 pageL1 - 34241 - en - B - UV 420 TTR-C H4 - Pul - en - hb5Kara WhiteNo ratings yet
- Simplifying Expressions CSEC TOPICDocument2 pagesSimplifying Expressions CSEC TOPICLatoyaWatkinsNo ratings yet
- Advantages of Two Wattmeter MethodDocument1 pageAdvantages of Two Wattmeter Methodsanwai_prop100% (1)
- EMT Formula Sheet MSC LevelDocument50 pagesEMT Formula Sheet MSC Levelanamiya2007100% (2)
- Operator OverloadingDocument6 pagesOperator OverloadingkainatNo ratings yet
- 2.symbol and AbbreviationsDocument1 page2.symbol and Abbreviationshambi1986No ratings yet
- Write Me Sometime Rocking Horse QuestionsDocument2 pagesWrite Me Sometime Rocking Horse Questionsapi-268558649No ratings yet
- Gen Physics 2 Q4M2Document30 pagesGen Physics 2 Q4M2Virly MelladoNo ratings yet