You might also like
- Otpornost Materijala 1Document4 pagesOtpornost Materijala 1Mihaela KasićNo ratings yet
- 742 Prirucnik Kulisic Cvrstoca PDFDocument96 pages742 Prirucnik Kulisic Cvrstoca PDFdembelovinaNo ratings yet
- 330 Energetske Pretvorbe 1Document72 pages330 Energetske Pretvorbe 1obicnaljubavnapjesmaNo ratings yet
- Podloge Za Vježbe-Materijali I PDFDocument34 pagesPodloge Za Vježbe-Materijali I PDFBruno Ban100% (1)
- Ventilacija I KlimatizacijaDocument48 pagesVentilacija I KlimatizacijaMario Fridl100% (1)
- 7 Vlak Tlak Vjezbe 2Document7 pages7 Vlak Tlak Vjezbe 2Dubravko KernNo ratings yet
- Zagrijavanje I Hlađenje ElektromotoraDocument9 pagesZagrijavanje I Hlađenje ElektromotoraAlmedinaNo ratings yet
- Materijali 3 KolokvijDocument2 pagesMaterijali 3 KolokvijLovro KosturNo ratings yet
- Poglavlje Složeno OpterećenjeDocument8 pagesPoglavlje Složeno Opterećenjehad de bajsNo ratings yet
- 004 Parne TurbineDocument18 pages004 Parne TurbineEjubNo ratings yet
- Rashladni Uređaji (Projektni Zadatak-Doaćahabi)Document25 pagesRashladni Uređaji (Projektni Zadatak-Doaćahabi)Adnan Karaahmetovic100% (3)
- Tehnicka TermodinamikaDocument356 pagesTehnicka TermodinamikaHasanAida HanaEdinNo ratings yet
- Osnove Termodinamika (Neven Ninic) PDFDocument81 pagesOsnove Termodinamika (Neven Ninic) PDFDamir MuminovićNo ratings yet
- Proračun VentilaDocument16 pagesProračun VentilaHarunH93No ratings yet
- Elementi Strojeva FSBDocument207 pagesElementi Strojeva FSBMarko ŠestanNo ratings yet
- 1UvodIV0 1 PDFDocument46 pages1UvodIV0 1 PDFDragan SavićNo ratings yet
- Termodinamika PDFDocument2 pagesTermodinamika PDFAnonymous hos8odNo ratings yet
- Seminarski Nove Tehnologije U VentilacijiDocument53 pagesSeminarski Nove Tehnologije U VentilacijiArmin HatibovicNo ratings yet
- Tolerancije Oblika I Polozaja PDFDocument72 pagesTolerancije Oblika I Polozaja PDFNamik SalihovicNo ratings yet
- TurbomašineDocument53 pagesTurbomašinesemizxxx100% (1)
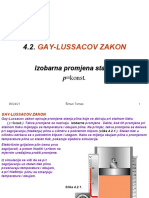
- 4.2. Gay-Lussacov ZakonDocument7 pages4.2. Gay-Lussacov ZakonNikola RozićNo ratings yet
- STROJARSTVODocument42 pagesSTROJARSTVOsally2610100% (1)
- Vektorska Analiza (Zbirka Rjesenih Zadataka) ProblemiDocument21 pagesVektorska Analiza (Zbirka Rjesenih Zadataka) ProbleminenadterorNo ratings yet
- Tolerancije I DosjediDocument17 pagesTolerancije I DosjediIvica Sakac100% (1)
- Fizika HitacDocument12 pagesFizika HitacZvonimirMesarošNo ratings yet
- Sustav Grijanja - CetinicDocument40 pagesSustav Grijanja - CetinicPero DopaNo ratings yet
- Ljevarstvo, Prezenzaticija. FSB ZagrebDocument63 pagesLjevarstvo, Prezenzaticija. FSB Zagrebkokolo100% (1)
- Mjerenja U Energetici - SkriptaDocument29 pagesMjerenja U Energetici - Skriptaciks66No ratings yet
- Energetska Postrojenja PDFDocument12 pagesEnergetska Postrojenja PDFivanmilosevic8450% (1)
- Asinkroni StrojDocument16 pagesAsinkroni Strojbrajo_No ratings yet
- Juraj Saucha - Vježba Iz Nauke o Čvrstoći I - 3. DioDocument46 pagesJuraj Saucha - Vježba Iz Nauke o Čvrstoći I - 3. DioAntonioLjubetić50% (2)
- Saucha Vježbe Iz Mehanike IIDocument100 pagesSaucha Vježbe Iz Mehanike IIDenis PendelicNo ratings yet
- Tehnička MehanikaDocument15 pagesTehnička MehanikaNermin HasanbašićNo ratings yet
- Praktikum Zavarivanje PDFDocument42 pagesPraktikum Zavarivanje PDFŽeljko RuškovačkiNo ratings yet
- 5 Prilog1 Proračun Steznog SpojaDocument9 pages5 Prilog1 Proračun Steznog SpojaDarko PanduricNo ratings yet
- Elementi StrojevaDocument98 pagesElementi StrojevaizzyjelenaNo ratings yet
- Tehnička Mehanika - Prezentacija 1i2 PDFDocument133 pagesTehnička Mehanika - Prezentacija 1i2 PDFJennifer Potter100% (1)
- Predavanje 1Document62 pagesPredavanje 1talic.hNo ratings yet
- OPS Mehanika 11Document84 pagesOPS Mehanika 11Stjepan BasarićNo ratings yet
- Mehanika Predavanje 1,2Document92 pagesMehanika Predavanje 1,2Nihad DzinoNo ratings yet
- Mehanika IIDocument5 pagesMehanika IIVlasacK100% (1)
- Mehanika 2 - TeorijaDocument11 pagesMehanika 2 - Teorijaj_galosicNo ratings yet
- 02CvrstocaMaterijalaIElemenata URaduDocument65 pages02CvrstocaMaterijalaIElemenata URadubuki03No ratings yet
- lOM MATERIJALA 1Document54 pageslOM MATERIJALA 1DjordjeDjNo ratings yet
- Ispitna Pitanja 2010 FizikaDocument6 pagesIspitna Pitanja 2010 FizikaSretnoDijeteNo ratings yet
- Seminarski Dinamika988139248Document14 pagesSeminarski Dinamika988139248Adi GrizićNo ratings yet
- TeorijaDocument19 pagesTeorijaTomislav FilipovićNo ratings yet
- Mehanika1 Sve Teorija PDFDocument237 pagesMehanika1 Sve Teorija PDFBernard VujnovicNo ratings yet
- Mehanika 1, UsmeniDocument237 pagesMehanika 1, UsmeniIva Waya VasiljevNo ratings yet
- MehanikaDocument144 pagesMehanikaAleksandar Trifunovic100% (2)
- Predavanja Uvod SnagaDocument84 pagesPredavanja Uvod SnagaIvana SeputNo ratings yet
- Biomehanika (1. Kolokvij) - 1Document7 pagesBiomehanika (1. Kolokvij) - 1Josipa KukoljNo ratings yet
- Pitanja Iz Mehanike IDocument22 pagesPitanja Iz Mehanike IBenjamin MišićNo ratings yet
- Građevna Mehanika - AntolićDocument198 pagesGrađevna Mehanika - AntolićIvekNo ratings yet
- Pitanja Iz TEHNIČKE MEHANIKE - OdtDocument10 pagesPitanja Iz TEHNIČKE MEHANIKE - OdtTanja MarkovicNo ratings yet
- BiomehanikaDocument5 pagesBiomehanikamonikaabvffNo ratings yet
- 3 Tema ISPIT FIZIKA Strucni Ak God 10 11Document2 pages3 Tema ISPIT FIZIKA Strucni Ak God 10 11Krešimir IvanovićNo ratings yet
- Cvrstoca Materijala I Elemenata U RaduDocument66 pagesCvrstoca Materijala I Elemenata U RaduAdmir Atko JusićNo ratings yet
- Sss PDFDocument154 pagesSss PDFadNo ratings yet
- Newtonovi Aksiomi GRO 17 - 03Document9 pagesNewtonovi Aksiomi GRO 17 - 03Rafael RukNo ratings yet
- Zakon o Cestama FBiH PDFDocument42 pagesZakon o Cestama FBiH PDFMaja AbdihodžićNo ratings yet
- 3DS - Nova Metoda Potvrde Plaćanja Na InternetuDocument2 pages3DS - Nova Metoda Potvrde Plaćanja Na InternetuLakiCamuNo ratings yet
- Lijecenje Kuranom RukjaDocument19 pagesLijecenje Kuranom RukjaMirzet Ahmetspahić100% (1)
- Urbano Release 9.0.10.0-HRVDocument5 pagesUrbano Release 9.0.10.0-HRVLakiCamuNo ratings yet
- Reg Uputstvo T1Document24 pagesReg Uputstvo T1Jasmin BijedicNo ratings yet
- Korisnička Uputa Za Aktiviranje Opcije Obavijesti o Dolaznim I Odlaznim Transakcijama Po RačunimaDocument1 pageKorisnička Uputa Za Aktiviranje Opcije Obavijesti o Dolaznim I Odlaznim Transakcijama Po RačunimaDino DellNo ratings yet
- Liv Nica 2016Document25 pagesLiv Nica 2016LakiCamuNo ratings yet
- Korisnička Uputa Za Aktiviranje Opcije Obavijesti o Dolaznim I Odlaznim Transakcijama Po RačunimaDocument1 pageKorisnička Uputa Za Aktiviranje Opcije Obavijesti o Dolaznim I Odlaznim Transakcijama Po RačunimaDino DellNo ratings yet
- Fizička Aktivnost Osoba Starije Životne DobiDocument12 pagesFizička Aktivnost Osoba Starije Životne DobiLakiCamuNo ratings yet
- KE1 WWW Zavareni SpojeviDocument49 pagesKE1 WWW Zavareni SpojeviairmikserNo ratings yet
- Obp 6 UpitiDocument13 pagesObp 6 UpitiLakiCamuNo ratings yet
- 1 PrSQLdodatakDocument16 pages1 PrSQLdodatakLakiCamuNo ratings yet
- Liv Nica 2016Document25 pagesLiv Nica 2016LakiCamuNo ratings yet
- Kada Sam Zaista Počeo Voljeti Sebe - 2012 Transformacija Svijesti PDFDocument1 pageKada Sam Zaista Počeo Voljeti Sebe - 2012 Transformacija Svijesti PDFLakiCamuNo ratings yet
- OTU Voda Knjiga 2Document39 pagesOTU Voda Knjiga 2Hasool01No ratings yet
- Proračun Varova PDFDocument5 pagesProračun Varova PDFLakiCamuNo ratings yet
- Mehanika I (Statika) - Skripta Resenih ZadatakaDocument97 pagesMehanika I (Statika) - Skripta Resenih ZadatakaDanilo Mrdak75% (8)
- Kozulic Jednostavni Nosaci PDFDocument24 pagesKozulic Jednostavni Nosaci PDFHamdo MešićNo ratings yet
- Nauka o Cvrstoci-12377 PDFDocument15 pagesNauka o Cvrstoci-12377 PDFMilutin ZizicNo ratings yet
- Kozulic Jednostavni Nosaci PDFDocument24 pagesKozulic Jednostavni Nosaci PDFHamdo MešićNo ratings yet
- Vjezbe 7Document14 pagesVjezbe 7nkruškoNo ratings yet
- 1 HR ACT Part1 v3 PDFDocument13 pages1 HR ACT Part1 v3 PDFLakiCamuNo ratings yet