You might also like
- Aritech CS350 Installation InstructionsDocument32 pagesAritech CS350 Installation Instructionslesliegilmore100% (1)
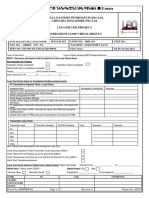
- Loop Check Sheet Sol ValveDocument2 pagesLoop Check Sheet Sol Valveshanks263100% (1)
- Programe Structure List PLCDocument7 pagesPrograme Structure List PLCalfianNo ratings yet
- 2 Wire Two Speed ModeDocument3 pages2 Wire Two Speed ModeAlfian AlfathNo ratings yet
- Apo Sapapo - sdp94 THL Location SplitDocument11 pagesApo Sapapo - sdp94 THL Location SplitHuy CaoNo ratings yet
- MC Lab Manual New SchemeDocument25 pagesMC Lab Manual New Schemeanon_790320219No ratings yet
- 10 TASK2.EXPT2 25 Aug 2020material - I - 25 Aug 2020 - PORT - PROGRAMMINGDocument2 pages10 TASK2.EXPT2 25 Aug 2020material - I - 25 Aug 2020 - PORT - PROGRAMMINGAnand AmsuriNo ratings yet
- XPEDITER/TSO - Stepping Through Program Execution: General QuestionsDocument20 pagesXPEDITER/TSO - Stepping Through Program Execution: General QuestionspagbarrosNo ratings yet
- DIGPRA3 - Assignment 2 - 34006559Document22 pagesDIGPRA3 - Assignment 2 - 34006559Themba MaviNo ratings yet
- Microp LAB RecordDocument10 pagesMicrop LAB RecordH A MDNo ratings yet
- PIC16F628A ExperimentosDocument11 pagesPIC16F628A ExperimentosCesar Matos100% (2)
- Indivuile Report - MicroDocument9 pagesIndivuile Report - MicroMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
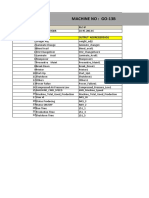
- Machine No: Go-13B: PLC PLC Cat No PLC IpDocument12 pagesMachine No: Go-13B: PLC PLC Cat No PLC IpDevarajNo ratings yet
- ESIOT LAB Mannual - CseDocument59 pagesESIOT LAB Mannual - CseTamil Vanan100% (1)
- Universidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasDocument10 pagesUniversidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasFlavio SalazarNo ratings yet
- Simple Multitasking ProgramDocument16 pagesSimple Multitasking ProgramFatiLilyNo ratings yet
- Modified Flashing LED ALGORITHMDocument24 pagesModified Flashing LED ALGORITHMDinesh Loitongbam100% (1)
- Mach3 - USB To LPT Port - versionNVUM - LPTv1.1Document23 pagesMach3 - USB To LPT Port - versionNVUM - LPTv1.1v.kotekNo ratings yet
- 3w PDFDocument14 pages3w PDFosmpotNo ratings yet
- 3.6.4 Explore CDPDocument1 page3.6.4 Explore CDPcollin quinnNo ratings yet
- Control Ningbo NBSL Nsfc01-01 Control System (4sw)Document14 pagesControl Ningbo NBSL Nsfc01-01 Control System (4sw)Winderson Macauran89% (18)
- Microprocessors and Interfaces Lab Report 01Document4 pagesMicroprocessors and Interfaces Lab Report 01Sunil GamageNo ratings yet
- Lab 4Document3 pagesLab 4Tipu RehmanNo ratings yet
- Tm4c123gh6pm StartupDocument6 pagesTm4c123gh6pm Startupyoubemine56No ratings yet
- NTR788 01a55-ImprimeDocument2 pagesNTR788 01a55-ImprimejoseluisrosglzNo ratings yet
- Rapcon-24 UsermanualDocument31 pagesRapcon-24 Usermanualkmbkris50% (2)
- LilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SDocument13 pagesLilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SFranco PalumboNo ratings yet
- Microprocessor Interfacing & Programming: Laboratory ManualDocument12 pagesMicroprocessor Interfacing & Programming: Laboratory ManualMuneeb Ahmad NasirNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E146Document146 pagesFord Fanuc R30ia R30ib Nextgen E146marialuisafloressanabriaNo ratings yet
- Embetronicx Com Tutorials Microcontrollers stm32 stm32 GpioDocument27 pagesEmbetronicx Com Tutorials Microcontrollers stm32 stm32 Gpiovictor sanchezNo ratings yet
- Quick Guide of PI8100 Operation6-7Document24 pagesQuick Guide of PI8100 Operation6-7Luis Jaramillo100% (1)
- MCTE 4105 Mechatronics Lab Iii Sem Ii - Session 19/20 Title: Experiment 5: 7 Segment DisplayDocument11 pagesMCTE 4105 Mechatronics Lab Iii Sem Ii - Session 19/20 Title: Experiment 5: 7 Segment DisplayJAdekingNo ratings yet
- LCD 16x2Document6 pagesLCD 16x2teguh iman100% (2)
- S.No Content Page No.: ContentsDocument18 pagesS.No Content Page No.: ContentsmbhagavanprasadNo ratings yet
- Nustart CM 3300-InstallDocument6 pagesNustart CM 3300-Installacc_zaskaNo ratings yet
- Appendix ADocument7 pagesAppendix AAbul KashemNo ratings yet
- GPIO Initialization For ARM MicroprocessorDocument25 pagesGPIO Initialization For ARM MicroprocessorCristian Santana RodriguezNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E286Document286 pagesFord Fanuc R30ia R30ib Nextgen E286marialuisafloressanabriaNo ratings yet
- ProgrammeDocument11 pagesProgrammeSaurabh KumarNo ratings yet
- MDE-4039 Encore Programming QRDocument2 pagesMDE-4039 Encore Programming QRyenaid7No ratings yet
- List of programs-CHE S6 and CES6-Revision 2015Document18 pagesList of programs-CHE S6 and CES6-Revision 2015Anna JoseNo ratings yet
- Calibration ProcedureDocument2 pagesCalibration ProcedureChidiebere Samuel OkogwuNo ratings yet
- PLC ProgramDocument16 pagesPLC ProgramRimmerNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E161Document161 pagesFord Fanuc R30ia R30ib Nextgen E161marialuisafloressanabriaNo ratings yet
- PL - Close.out - After Procedure 2010Document2 pagesPL - Close.out - After Procedure 2010Gera EspinosaNo ratings yet
- Lab 2Document7 pagesLab 2Md AssadNo ratings yet
- 门机控制器说明书 Door Operator Controller Instruction ManualDocument15 pages门机控制器说明书 Door Operator Controller Instruction ManualHeiner Hidalgo100% (2)
- LNP ProjectDocument12 pagesLNP ProjectbugyourselfNo ratings yet
- Arduino Starter KitDocument15 pagesArduino Starter Kitelektric2007No ratings yet
- 20EC3352 LAB EXPERIMENTS OldDocument47 pages20EC3352 LAB EXPERIMENTS Oldswathi kesanaNo ratings yet
- AVR Lab SessionsDocument26 pagesAVR Lab Sessions20-026-CE SF Pujan patelNo ratings yet
- CSM: Drive Control & Signalling: PrintDocument7 pagesCSM: Drive Control & Signalling: Printthekhang272No ratings yet
- TG0069en-Ed13 SIP Maintenance R10.x and R11 2 de 2Document78 pagesTG0069en-Ed13 SIP Maintenance R10.x and R11 2 de 2Eduardo SilvaNo ratings yet
- How To Install MoxaDocument3 pagesHow To Install MoxaRidha JuliyantiNo ratings yet
- 1 8 6 / 1 0 0 / 3 4 E Digitalkeytelephone System User GuideDocument37 pages1 8 6 / 1 0 0 / 3 4 E Digitalkeytelephone System User GuideMircea FrantNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E180Document180 pagesFord Fanuc R30ia R30ib Nextgen E180marialuisafloressanabriaNo ratings yet
- Nortel PBX - Operating ProcedureDocument22 pagesNortel PBX - Operating ProcedurePranjit KalitaNo ratings yet
- Chapter Six: 2004 Morgan Kaufmann PublishersDocument25 pagesChapter Six: 2004 Morgan Kaufmann PublisherssamquicklyNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 pagesEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseNo ratings yet
- Internal Resistance To Corrosion in SHS - To Go On WebsiteDocument48 pagesInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuNo ratings yet
- Logistic RegressionDocument7 pagesLogistic RegressionShashank JainNo ratings yet
- Project Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesDocument12 pagesProject Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesLeann WeaverNo ratings yet
- Abilash - Subramanian CV - 003 PDFDocument4 pagesAbilash - Subramanian CV - 003 PDFAbilash SubramanianNo ratings yet
- Leveriza Heights SubdivisionDocument4 pagesLeveriza Heights SubdivisionTabordan AlmaeNo ratings yet
- Service Quality Dimensions of A Philippine State UDocument10 pagesService Quality Dimensions of A Philippine State UVilma SottoNo ratings yet
- Test On Real NumberaDocument1 pageTest On Real Numberaer.manalirathiNo ratings yet
- 2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Document2 pages2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Edison LimNo ratings yet
- School Based Management Contextualized Self Assessment and Validation Tool Region 3Document29 pagesSchool Based Management Contextualized Self Assessment and Validation Tool Region 3Felisa AndamonNo ratings yet
- Unit 2: Air Intake and Exhaust SystemsDocument10 pagesUnit 2: Air Intake and Exhaust SystemsMahmmod Al-QawasmehNo ratings yet
- Naval TV SystemDocument24 pagesNaval TV Systemsharmasandeep0010No ratings yet
- The University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDocument5 pagesThe University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDavid Adeyinka RamgobinNo ratings yet
- "Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Document12 pages"Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Gaston AvilaNo ratings yet
- JUnit 5 User GuideDocument90 pagesJUnit 5 User GuideaawaakNo ratings yet
- Analisis Kebutuhan Bahan Ajar Berbasis EDocument9 pagesAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniNo ratings yet
- Configuration Guide - Interface Management (V300R007C00 - 02)Document117 pagesConfiguration Guide - Interface Management (V300R007C00 - 02)Dikdik PribadiNo ratings yet
- Thesis TipsDocument57 pagesThesis TipsJohn Roldan BuhayNo ratings yet
- Title: Smart Monitoring & Control of Electrical Distribution System Using IOTDocument27 pagesTitle: Smart Monitoring & Control of Electrical Distribution System Using IOTwaleed HaroonNo ratings yet
- Section 1 Company Overview StandardsDocument34 pagesSection 1 Company Overview StandardsChris MedeirosNo ratings yet
- Fundasurv 215 Plate 1mDocument3 pagesFundasurv 215 Plate 1mKeith AtencioNo ratings yet
- OTP User Manual For English) v1,0Document15 pagesOTP User Manual For English) v1,0auyinNo ratings yet
- File RecordsDocument161 pagesFile RecordsAtharva Thite100% (2)
- Statistical Process Control and Process Capability PPT EXPLANATIONDocument2 pagesStatistical Process Control and Process Capability PPT EXPLANATIONJohn Carlo SantiagoNo ratings yet
- 53 English Work Book XDocument292 pages53 English Work Book XArun DhawanNo ratings yet
- Atoma Amd Mol&Us CCTK) : 2Nd ErmDocument4 pagesAtoma Amd Mol&Us CCTK) : 2Nd ErmjanviNo ratings yet
- IPA Smith Osborne21632Document28 pagesIPA Smith Osborne21632johnrobertbilo.bertilloNo ratings yet
- Keeping Track of Your Time: Keep Track Challenge Welcome GuideDocument1 pageKeeping Track of Your Time: Keep Track Challenge Welcome GuideRizky NurdiansyahNo ratings yet
- Javascript Notes For ProfessionalsDocument490 pagesJavascript Notes For ProfessionalsDragos Stefan NeaguNo ratings yet
- My BaboogDocument1 pageMy BaboogMaral Habeshian VieiraNo ratings yet