You might also like
- M2 Forces and MomentsDocument46 pagesM2 Forces and MomentsErle100% (1)
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- m4l24 Lesson 24 The Direct Stiffness Method: Truss AnalysisDocument23 pagesm4l24 Lesson 24 The Direct Stiffness Method: Truss AnalysisVitor Vale100% (1)
- ARCH 162: Statics and Strength of MaterialsDocument45 pagesARCH 162: Statics and Strength of MaterialsFurkan AktaşNo ratings yet
- Sri Shanmugha College of Engineering and TechnologyDocument15 pagesSri Shanmugha College of Engineering and TechnologyBalamurugan Gopalsamy KrishnaswamiNo ratings yet
- Lecture 1Document53 pagesLecture 1Muhammet TaskıranNo ratings yet
- Mechanics CH-3 MarkosDocument16 pagesMechanics CH-3 MarkosGadisaNo ratings yet
- Equilibrium of Force SystemsDocument5 pagesEquilibrium of Force SystemsAdrian SamonteNo ratings yet
- Structural ANalysisDocument291 pagesStructural ANalysispairilioNo ratings yet
- Week 2: Resultant of Force SystemDocument4 pagesWeek 2: Resultant of Force SystemJohn Kristoffer VillarNo ratings yet
- Equilibrium of Force SystemsDocument8 pagesEquilibrium of Force SystemsIra James AbanesNo ratings yet
- Structural AnalysisDocument220 pagesStructural AnalysisMohamedSajeerMNo ratings yet
- Unit-I: Me18201 - Engineering MechanicsDocument20 pagesUnit-I: Me18201 - Engineering MechanicsMANOJ KUMAR MECNo ratings yet
- Equilibrium & Support ReactionsDocument28 pagesEquilibrium & Support ReactionsKirshna JolaniaNo ratings yet
- Week 1: Fundamental ConceptsDocument6 pagesWeek 1: Fundamental ConceptsJohn Kristoffer VillarNo ratings yet
- L-1 Introduction To MechanicsDocument10 pagesL-1 Introduction To Mechanicspinku kumarNo ratings yet
- Module 1: Introduction: Review of Basic Concepts in Mechnics Lecture 2: EquilibriumDocument3 pagesModule 1: Introduction: Review of Basic Concepts in Mechnics Lecture 2: Equilibriumchristi SNo ratings yet
- Chapter-2 - Free UnDamped VibrationsDocument12 pagesChapter-2 - Free UnDamped VibrationsMuhammad Daud AliNo ratings yet
- Strength of Materials - 2 - Internal Forces in Statically Determined MembersDocument36 pagesStrength of Materials - 2 - Internal Forces in Statically Determined MembersPaul DumitruNo ratings yet
- Chapter ViDocument9 pagesChapter ViJuan Pablo Quispe ApazaNo ratings yet
- Mech30 Chapter 2 PDFDocument24 pagesMech30 Chapter 2 PDFjccccvNo ratings yet
- Equilibrium of Rigid BodiesDocument17 pagesEquilibrium of Rigid BodiesErikNo ratings yet
- EM Unit Wise PDFDocument32 pagesEM Unit Wise PDFRamuVasaNo ratings yet
- Structural Analysis For Architect NotesDocument82 pagesStructural Analysis For Architect NotesALAWI SSEKUBUNGANo ratings yet
- Engineering Mech (Presentation) 2Document66 pagesEngineering Mech (Presentation) 2Thomas Roy Cacho SantosNo ratings yet
- Engineering Mech (Presentation)Document53 pagesEngineering Mech (Presentation)Thomas Roy Cacho SantosNo ratings yet
- Chapter 1 - Resultants of Force SystemDocument3 pagesChapter 1 - Resultants of Force SystemmarianNo ratings yet
- Internal Forces in Statically Determinate MembersDocument43 pagesInternal Forces in Statically Determinate MembersBendis AmmNo ratings yet
- Cauchy's Stress Theorem-Stress Tensor-The State of Stress at A Point PDFDocument8 pagesCauchy's Stress Theorem-Stress Tensor-The State of Stress at A Point PDFonnly1964No ratings yet
- Equilibrium of Rigid Bodies: Lacanilao Johnley F. AE-207Document6 pagesEquilibrium of Rigid Bodies: Lacanilao Johnley F. AE-207Jeremy ValerioNo ratings yet
- FME Notes Unit1-1Document13 pagesFME Notes Unit1-1vishal shuklaNo ratings yet
- RME Notes 2.1 MechanicsDocument7 pagesRME Notes 2.1 Mechanicsbodkhe harshNo ratings yet
- SPLM2 KineticsDocument50 pagesSPLM2 KineticsBrian LuarNo ratings yet
- Structure Is Analyzable Based Only On Its Geometry. A Statically Indeterminate Structure IsDocument8 pagesStructure Is Analyzable Based Only On Its Geometry. A Statically Indeterminate Structure IsAnonymous mcHqIfbnV1No ratings yet
- Chapter 3 - EquilibriumDocument1 pageChapter 3 - EquilibriumYohannes MesfinNo ratings yet
- Lecture 3 - The Equilibrium ModelDocument29 pagesLecture 3 - The Equilibrium ModelJ KimNo ratings yet
- الميكانيك الهندسيDocument175 pagesالميكانيك الهندسيkraralbsyrawyNo ratings yet
- Lesson 2. Force SystemDocument8 pagesLesson 2. Force SystemNadjer C. AdamNo ratings yet
- Bodies or Fluids That Are at Rest or in Motions.: DynamicsDocument23 pagesBodies or Fluids That Are at Rest or in Motions.: DynamicsJames MichaelNo ratings yet
- Engineering Mechanics QBDocument21 pagesEngineering Mechanics QBVinay KandulaNo ratings yet
- Engineering Mechanics I Meg205-2Document15 pagesEngineering Mechanics I Meg205-2Oyekale IniNo ratings yet
- Practical No-1 (Reaction of Beam)Document15 pagesPractical No-1 (Reaction of Beam)Akash GolwalkarNo ratings yet
- Intro To Structural Mechanics - MITDocument65 pagesIntro To Structural Mechanics - MITNajwa BetarNo ratings yet
- Unit - 1Document37 pagesUnit - 1Hanan ShayiboNo ratings yet
- Strength of Materials (ME3206)Document64 pagesStrength of Materials (ME3206)Jesh KeerawellaNo ratings yet
- UNIT 2 TheoryDocument18 pagesUNIT 2 TheoryBijay RayamajhiNo ratings yet
- Non-Coplanar: Unit 1 Coplanar and ForcesDocument28 pagesNon-Coplanar: Unit 1 Coplanar and ForcesSandhu GuriqbalNo ratings yet
- Mathematical ModelsDocument69 pagesMathematical Modelskyaw phone htetNo ratings yet
- Chapter1 3Document7 pagesChapter1 3REDDEN GAMBOANo ratings yet
- CH 2Document95 pagesCH 2유지상No ratings yet
- 2.2.4 Equivalent Nodal Forces: 26 A Direct Physical Approach To Problems in Elasticity: Plane StressDocument2 pages2.2.4 Equivalent Nodal Forces: 26 A Direct Physical Approach To Problems in Elasticity: Plane Stressdaniel92fonsecaNo ratings yet
- Chapter 3 - Equilibrium: Learning Outcomes For This ChapterDocument15 pagesChapter 3 - Equilibrium: Learning Outcomes For This ChapterLetshego Itumeleng MoahloliNo ratings yet
- Basset - The Flexibility MethodDocument9 pagesBasset - The Flexibility MethodGarcía Salcedo EstefaníaNo ratings yet
- Algebra, The Problem of Resolution of A Force, F, Into Components IsDocument4 pagesAlgebra, The Problem of Resolution of A Force, F, Into Components IsAnil BeheraNo ratings yet
- (Z Tranb) I W .: 'T: THE of Motion of inDocument1 page(Z Tranb) I W .: 'T: THE of Motion of inBhind NijjarNo ratings yet
- Lecture 1423904717Document102 pagesLecture 1423904717moondonoo7No ratings yet
- 2 Statics of Particles - 2Document10 pages2 Statics of Particles - 2gamue08No ratings yet
- Chapter 1 - Principles of statics-2CE-4Document13 pagesChapter 1 - Principles of statics-2CE-4Bea BachillerNo ratings yet
- B104 PDFDocument1 pageB104 PDFsereNo ratings yet
- Stabilizing The Roof StructureDocument1 pageStabilizing The Roof StructuresereNo ratings yet
- 3.2 Equilibrium of Rigid Bodies Simple Beams With Distributed LoadsDocument1 page3.2 Equilibrium of Rigid Bodies Simple Beams With Distributed LoadssereNo ratings yet
- B 89Document1 pageB 89sereNo ratings yet
- Analysis of Selected Determinate Structural Systems: 3.1 Equilibrium of A Particle Simple CablesDocument1 pageAnalysis of Selected Determinate Structural Systems: 3.1 Equilibrium of A Particle Simple CablessereNo ratings yet
- Figure 2.58 Two Rollers-Partially Constrained/unstableDocument1 pageFigure 2.58 Two Rollers-Partially Constrained/unstablesereNo ratings yet
- B 91Document1 pageB 91sereNo ratings yet
- 2.6 Statical Indeterminacy and Improper Constraints: Figure 2.56 (A) Truss With Hinge and Roller SupportDocument1 page2.6 Statical Indeterminacy and Improper Constraints: Figure 2.56 (A) Truss With Hinge and Roller SupportsereNo ratings yet
- Stabilizers: Cable Flutter in A Lightweight RoofDocument1 pageStabilizers: Cable Flutter in A Lightweight RoofsereNo ratings yet
- B95Document1 pageB95sereNo ratings yet
- Three Equations of Equilibrium and Three Unknown Support ReactionsDocument1 pageThree Equations of Equilibrium and Three Unknown Support ReactionssereNo ratings yet
- Force Systems: Section 2.3Document1 pageForce Systems: Section 2.3sereNo ratings yet
- b93f PDFDocument1 pageb93f PDFsereNo ratings yet
- P 84 FDocument1 pageP 84 FsereNo ratings yet
- B85 FDocument1 pageB85 FsereNo ratings yet
- Three Equations of Equilibrium and Three Unknown Support ReactionsDocument1 pageThree Equations of Equilibrium and Three Unknown Support ReactionssereNo ratings yet
- B, and E, and Also The Internal Constraint Forces at C and DDocument1 pageB, and E, and Also The Internal Constraint Forces at C and DsereNo ratings yet
- SolutionDocument1 pageSolutionsereNo ratings yet
- Figure 11.11: Structural Design PrinciplesDocument1 pageFigure 11.11: Structural Design PrinciplessereNo ratings yet
- (A) Pictorial Diagram. (B) Free-Body DiagramDocument1 page(A) Pictorial Diagram. (B) Free-Body DiagramsereNo ratings yet
- Table 2.2 Connection and Support Examples.: RollerDocument1 pageTable 2.2 Connection and Support Examples.: RollersereNo ratings yet
- CA+ CB 0: ForceDocument1 pageCA+ CB 0: ForcesereNo ratings yet
- Example Problems: Equilibrium of Rigid Bodies: SolutionDocument1 pageExample Problems: Equilibrium of Rigid Bodies: SolutionsereNo ratings yet
- (A) Pictorial Diagram.: Figure 2.53 Simple Beam With Two Concentrated LoadsDocument1 page(A) Pictorial Diagram.: Figure 2.53 Simple Beam With Two Concentrated LoadssereNo ratings yet
- 2.5 Free-Body Diagrams of Rigid Bodies: Table 2.1 (A) Support Conditions For Coplanar StructuresDocument1 page2.5 Free-Body Diagrams of Rigid Bodies: Table 2.1 (A) Support Conditions For Coplanar StructuressereNo ratings yet
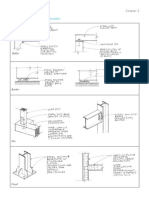
- Table 2.1 (B) Supports and Connections For Coplanar StructuresDocument1 pageTable 2.1 (B) Supports and Connections For Coplanar StructuressereNo ratings yet
- Analytical Solution:: ForceDocument1 pageAnalytical Solution:: ForcesereNo ratings yet
- P 72Document1 pageP 72sereNo ratings yet
- Statics: - (200#) Cos 30° - 173.2# - (200#) Sin 30° - 100# +CD 0 - 3 5 + 4 5Document1 pageStatics: - (200#) Cos 30° - 173.2# - (200#) Sin 30° - 100# +CD 0 - 3 5 + 4 5sereNo ratings yet
- Graphical Solution: ForceDocument1 pageGraphical Solution: ForcesereNo ratings yet