You might also like
- Lecture 4 - Particle Under A Net ForceDocument15 pagesLecture 4 - Particle Under A Net ForceJ KimNo ratings yet
- Chapter 3-Equilibriu of ParticlesDocument102 pagesChapter 3-Equilibriu of ParticlesMohammed Al-OdatNo ratings yet
- Equilibrium of Force SystemsDocument5 pagesEquilibrium of Force SystemsAdrian SamonteNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Chapter 5 StaticDocument22 pagesChapter 5 Staticnur aisyahNo ratings yet
- 02 Statics of Rigid Bodies 03 Rigid Bodies PDFDocument10 pages02 Statics of Rigid Bodies 03 Rigid Bodies PDFjollyrosegonzalesNo ratings yet
- Forces and Motion II: 5.1 The Important StuffDocument28 pagesForces and Motion II: 5.1 The Important StuffSclaffenNo ratings yet
- 2.2.4 Equivalent Nodal Forces: 26 A Direct Physical Approach To Problems in Elasticity: Plane StressDocument2 pages2.2.4 Equivalent Nodal Forces: 26 A Direct Physical Approach To Problems in Elasticity: Plane Stressdaniel92fonsecaNo ratings yet
- Newton's Laws of Motion ExplainedDocument52 pagesNewton's Laws of Motion Explainedharhar690123No ratings yet
- m01 02 Energy Methods in Structural Analysis Principle of Superposition Strain EnergyDocument21 pagesm01 02 Energy Methods in Structural Analysis Principle of Superposition Strain EnergyhorressNo ratings yet
- 31931-179-Newtons Laws of MotionDocument53 pages31931-179-Newtons Laws of MotionomboyeNo ratings yet
- Applied Mechanics BCE I/II Static Equilibrium ConceptsDocument18 pagesApplied Mechanics BCE I/II Static Equilibrium ConceptsBijay RayamajhiNo ratings yet
- 002.resultants of Force SystemsDocument9 pages002.resultants of Force SystemsIra James AbanesNo ratings yet
- 2.2 - Forces: Topic 2: MechanicsDocument51 pages2.2 - Forces: Topic 2: MechanicsSimon Joseph ManceraNo ratings yet
- Section 7.1 - Vectors As Forces: S M KG NDocument3 pagesSection 7.1 - Vectors As Forces: S M KG NTimie AdenusiNo ratings yet
- Review Chapter 4-5Document29 pagesReview Chapter 4-5fannyparamitaNo ratings yet
- Statics of Rigid Bodies 03 Rigid BodiesDocument10 pagesStatics of Rigid Bodies 03 Rigid BodiesArlie LobrigoNo ratings yet
- Presentation 3Document62 pagesPresentation 3leleparthaNo ratings yet
- ThermodynamicsDocument128 pagesThermodynamicskushagra singhNo ratings yet
- Newtons Laws of MotionDocument9 pagesNewtons Laws of MotionVikalp JoshiNo ratings yet
- Pages From Strain EneryDocument19 pagesPages From Strain EneryJaneshaNo ratings yet
- Statics - Chapter 3 PRT 1Document41 pagesStatics - Chapter 3 PRT 1Mu'adzAzriNo ratings yet
- Structural Analysis for Architects: An IntroductionDocument82 pagesStructural Analysis for Architects: An IntroductionALAWI SSEKUBUNGANo ratings yet
- CHAPTER 2 FORCE VECTOR (Mechanic)Document41 pagesCHAPTER 2 FORCE VECTOR (Mechanic)Afiq NajmiNo ratings yet
- Stiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofDocument2 pagesStiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofmujeebNo ratings yet
- Lecture 4A With Solution - Laws of Motion Part 1 (Introduction and Particles in Equilibrium)Document32 pagesLecture 4A With Solution - Laws of Motion Part 1 (Introduction and Particles in Equilibrium)Mark Alexis AtesorNo ratings yet
- Chapter-4-Stresses in BeamsDocument25 pagesChapter-4-Stresses in BeamsSani MohammedNo ratings yet
- Kinetics of a Particle: Forces and AccelerationsDocument63 pagesKinetics of a Particle: Forces and AccelerationsGIAN EMMANUELLE SANCHEZNo ratings yet
- 2 Statics of Particles - 2Document10 pages2 Statics of Particles - 2gamue08No ratings yet
- Internal Forces in Statically Determinate MembersDocument43 pagesInternal Forces in Statically Determinate MembersBendis AmmNo ratings yet
- Lecture-Kinetics of Particles Newton S 2nd Law3-1Document28 pagesLecture-Kinetics of Particles Newton S 2nd Law3-1Alyssa NavarroNo ratings yet
- Topic 2.2 - Forces - PPT NewDocument61 pagesTopic 2.2 - Forces - PPT Newferas jehadNo ratings yet
- Strength of Materials - 2 - Internal Forces in Statically Determined MembersDocument36 pagesStrength of Materials - 2 - Internal Forces in Statically Determined MembersPaul DumitruNo ratings yet
- Dynamics - Lecture TwoDocument22 pagesDynamics - Lecture TwoKassimNo ratings yet
- Equilibrium of Force SystemsDocument8 pagesEquilibrium of Force SystemsIra James AbanesNo ratings yet
- Particle Dynamics (11th JK) WADocument48 pagesParticle Dynamics (11th JK) WAParijat SutradharNo ratings yet
- Physics WorkDocument12 pagesPhysics WorkManish VatsNo ratings yet
- Module 2 in Abe 215 Statics1 l1 5Document22 pagesModule 2 in Abe 215 Statics1 l1 5Cynel DelaNo ratings yet
- Equilibrium of A ParticleDocument371 pagesEquilibrium of A ParticleChristine Torrepenida RasimoNo ratings yet
- Newton's Laws of Motion NotesDocument31 pagesNewton's Laws of Motion NotesPraveen KumarpillaiNo ratings yet
- Lec 27 PDFDocument7 pagesLec 27 PDFYalew MekonnenNo ratings yet
- Module 4: Deflection of Structures Lecture 6: Maxwell-Betti Law of Reciprocal DeflectionsDocument7 pagesModule 4: Deflection of Structures Lecture 6: Maxwell-Betti Law of Reciprocal DeflectionsVedang KulkarniNo ratings yet
- Maxwell's Reciprocal Theory PDFDocument7 pagesMaxwell's Reciprocal Theory PDFManik MiaNo ratings yet
- Maxwells Theorem of Reciprocal Displacements Bettis LawDocument7 pagesMaxwells Theorem of Reciprocal Displacements Bettis LawJC DOBLONNo ratings yet
- Maxwell-Betti Law Reciprocal DeflectionsDocument7 pagesMaxwell-Betti Law Reciprocal DeflectionsGururaj SivaprakasamNo ratings yet
- Module 4: Deflection of Structures Lecture 6: Maxwell-Betti Law of Reciprocal DeflectionsDocument7 pagesModule 4: Deflection of Structures Lecture 6: Maxwell-Betti Law of Reciprocal DeflectionsTHE BOSS DRAWINGBAAZNo ratings yet
- Equillibrium of Coplanar Concurrent ForcesDocument17 pagesEquillibrium of Coplanar Concurrent Forcessalman husainNo ratings yet
- Statics Lecture 2Document3 pagesStatics Lecture 2johnandry.tutorNo ratings yet
- Chapter 3Document17 pagesChapter 3Usha GautamNo ratings yet
- ISV SM Ch06Document64 pagesISV SM Ch06이훈석No ratings yet
- Structural Analysis R19 - UNIT-1 (Ref-2)Document56 pagesStructural Analysis R19 - UNIT-1 (Ref-2)SushNo ratings yet
- Laboratory 1aDocument7 pagesLaboratory 1aH2 MgZNo ratings yet
- Unit 2 Influence Lines Statically Determinate Trusses: StructureDocument24 pagesUnit 2 Influence Lines Statically Determinate Trusses: StructureRaj BakhtaniNo ratings yet
- Chapter 03Document89 pagesChapter 03KIÊN HOÀNG TRUNGNo ratings yet
- Intro To Structural Mechanics - MITDocument65 pagesIntro To Structural Mechanics - MITNajwa BetarNo ratings yet
- CH 3 EquilibriumDocument22 pagesCH 3 Equilibriummohamad fitri F2008No ratings yet
- Stresses: 2.1 General TheoryDocument25 pagesStresses: 2.1 General TheoryLocoo Goku YoshiiNo ratings yet
- Improper IntegralsDocument2 pagesImproper IntegralsJ KimNo ratings yet
- Module1.1 - AntiDifferentiation Concepts - FormulasDocument3 pagesModule1.1 - AntiDifferentiation Concepts - FormulasJ KimNo ratings yet
- Calculus Definite IntegralDocument2 pagesCalculus Definite IntegralJ KimNo ratings yet
- Module 1.3 - Applications of IntegrationDocument4 pagesModule 1.3 - Applications of IntegrationJ KimNo ratings yet
- Module 1.2 - Transforming The IntegrandDocument3 pagesModule 1.2 - Transforming The IntegrandJ KimNo ratings yet
- M3.4 - Partial FractionsDocument3 pagesM3.4 - Partial FractionsJ KimNo ratings yet
- Calculating areas between curves using integrationDocument34 pagesCalculating areas between curves using integrationJ KimNo ratings yet
- Constant of IntegrationDocument2 pagesConstant of IntegrationJ KimNo ratings yet
- M4.3 Hydrostatic Pressure and WorkDocument33 pagesM4.3 Hydrostatic Pressure and WorkJ KimNo ratings yet
- Lecture 1 - Intro To Vector AnalysisDocument20 pagesLecture 1 - Intro To Vector AnalysisJ KimNo ratings yet
- M4.2 Volume Solid of RevolutionDocument19 pagesM4.2 Volume Solid of RevolutionJ KimNo ratings yet
- Mass Media Infographics by SlidesgoDocument32 pagesMass Media Infographics by SlidesgoJ KimNo ratings yet
- Lecture 2 - KinematicsDocument56 pagesLecture 2 - KinematicsJ KimNo ratings yet
- Lecture 5 - Work Done by A Constant ForceDocument21 pagesLecture 5 - Work Done by A Constant ForceJ KimNo ratings yet
- SHS Work Immersion Portfolio (Final)Document47 pagesSHS Work Immersion Portfolio (Final)Kris Padon90% (58)
- 1Document4 pages1J KimNo ratings yet
- HttpsDocument1 pageHttpsJ KimNo ratings yet
- DataSheet IMA18-10BE1ZC0K 6041793 enDocument8 pagesDataSheet IMA18-10BE1ZC0K 6041793 enRuben Hernandez TrejoNo ratings yet
- Osda Solar Module - Installation ManualDocument21 pagesOsda Solar Module - Installation ManualIOZEF1No ratings yet
- JMPRTraininga I5545e PDFDocument500 pagesJMPRTraininga I5545e PDFmvptoxNo ratings yet
- Christos A. Ioannou & Dimitrios A. Ioannou, Greece: Victim of Excessive Austerity or of Severe "Dutch Disease"? June 2013Document26 pagesChristos A. Ioannou & Dimitrios A. Ioannou, Greece: Victim of Excessive Austerity or of Severe "Dutch Disease"? June 2013Christos A IoannouNo ratings yet
- Orion C.M. HVAC Case Study-07.25.23Document25 pagesOrion C.M. HVAC Case Study-07.25.23ledmabaya23No ratings yet
- Dream Life - Allan HobsonDocument307 pagesDream Life - Allan HobsonJose MuñozNo ratings yet
- SolidWorks2018 PDFDocument1 pageSolidWorks2018 PDFAwan D'almightyNo ratings yet
- Draconis CombineDocument11 pagesDraconis CombineMarco Moracha100% (1)
- Su1 Assessment U01Document14 pagesSu1 Assessment U01Cristian Seas ArceNo ratings yet
- Danbury BrochureDocument24 pagesDanbury BrochureQuique MartinNo ratings yet
- Definition and Scope of Public FinanceDocument2 pagesDefinition and Scope of Public FinanceArfiya MubeenNo ratings yet
- Agent Orange Dioxin Military BasesDocument4 pagesAgent Orange Dioxin Military BasesChildren Of Vietnam Veterans Health AllianceNo ratings yet
- Fast and Reliable: Handheld TympanometerDocument4 pagesFast and Reliable: Handheld TympanometersermedNo ratings yet
- Malabsorption and Elimination DisordersDocument120 pagesMalabsorption and Elimination DisordersBeBs jai SelasorNo ratings yet
- Psych 1xx3 Quiz AnswersDocument55 pagesPsych 1xx3 Quiz Answerscutinhawayne100% (4)
- Thermal Physics A Lecture NotesDocument35 pagesThermal Physics A Lecture Notescarlo mtongiNo ratings yet
- Active and Passive Voice quizDocument2 pagesActive and Passive Voice quizM3xobNo ratings yet
- 4) April 2023 Current AffairsDocument24 pages4) April 2023 Current AffairsPicturesque vibrant shadesNo ratings yet
- Bài tập tiếng Anh 12 (Reading)Document7 pagesBài tập tiếng Anh 12 (Reading)Minh AnhNo ratings yet
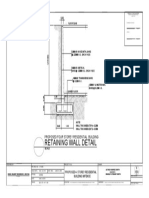
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- Greek Myth WebquestDocument9 pagesGreek Myth Webquesthollyhock27No ratings yet
- FMAI - Ch04 - Stock MarketDocument105 pagesFMAI - Ch04 - Stock Marketngoc duongNo ratings yet
- EBSD Specimen Prep PaperDocument36 pagesEBSD Specimen Prep PaperPaul RosiahNo ratings yet
- MKTG 2126 - Assignment 3Document2 pagesMKTG 2126 - Assignment 3omar mcintoshNo ratings yet
- European Journal of Internal MedicineDocument4 pagesEuropean Journal of Internal Medicinesamer battatNo ratings yet
- AlternatorDocument3 pagesAlternatorVatsal PatelNo ratings yet
- Lecture Euler EquationDocument33 pagesLecture Euler EquationYash RajNo ratings yet
- 2020.07.31 Marchese Declaration With ExhibitsDocument103 pages2020.07.31 Marchese Declaration With Exhibitsheather valenzuelaNo ratings yet
- Automatic Repeat Request (Arq)Document15 pagesAutomatic Repeat Request (Arq)Rahul RedkarNo ratings yet
- Management Theory and Practice: Methods of Performance AppraisalDocument3 pagesManagement Theory and Practice: Methods of Performance AppraisalRadha maiNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet