You might also like
- Design of Arithmetic Calculator Using FpgaDocument58 pagesDesign of Arithmetic Calculator Using FpgavikramNo ratings yet
- Ch03 AVR Programming in CDocument47 pagesCh03 AVR Programming in CSabit100% (2)
- Dice GameDocument17 pagesDice GameDuy Le100% (1)
- VHDL Code For 4 Bit ComparatorDocument2 pagesVHDL Code For 4 Bit Comparatornady220944% (9)
- 8051 Address DecodingDocument10 pages8051 Address DecodingDangthieuhoi Vu100% (1)
- Elevator InterfacingDocument25 pagesElevator Interfacingsharada100% (1)
- LCD Interfacing With SPARTAN-3 FPGADocument12 pagesLCD Interfacing With SPARTAN-3 FPGAKaranNo ratings yet
- Digital CalendarDocument58 pagesDigital Calendarmgitecetech100% (8)
- Verilog Dice GameDocument6 pagesVerilog Dice GameVishnu Sharma50% (2)
- Dice Game Controller Using SM ChartDocument43 pagesDice Game Controller Using SM ChartanjalisweNo ratings yet
- Lab10 Dice GameDocument10 pagesLab10 Dice GamePhuc Van NguyenNo ratings yet
- FPGA Temp SensorDocument8 pagesFPGA Temp SensorRajan BhartiNo ratings yet
- ARM Organization and Implementation: Aleksandar MilenkovicDocument37 pagesARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- PIC18F4550 ADC - PIC ControllersDocument9 pagesPIC18F4550 ADC - PIC ControllersKrishanu Modak100% (1)
- Automatic Movable Railway PlatformDocument22 pagesAutomatic Movable Railway Platformdevikax920100% (2)
- Digital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessDocument31 pagesDigital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessEMJAYNo ratings yet
- 8251 - UsartDocument26 pages8251 - UsartSreekanth PagadapalliNo ratings yet
- Verilog Code For Vending Machine: BY D MeghanaDocument22 pagesVerilog Code For Vending Machine: BY D MeghanaramadevidamireddyNo ratings yet
- Digital Lab Cs 6211 VHDL ProgramsDocument13 pagesDigital Lab Cs 6211 VHDL ProgramsMurugan GNo ratings yet
- DC Motor Interfacing With ARM MBED - MBEDDocument2 pagesDC Motor Interfacing With ARM MBED - MBEDKrishanu Modak100% (1)
- UNIT-V Realization of State MachinesDocument29 pagesUNIT-V Realization of State MachinesNarasimha Murthy Yayavaram100% (20)
- Lab 1Document13 pagesLab 1Sopno GhuriNo ratings yet
- DAC ADC Interfacing With 8051Document37 pagesDAC ADC Interfacing With 8051Gowri100% (1)
- More On SQLDocument29 pagesMore On SQLrahuldhole33100% (2)
- Generating PWM With PIC Microcontroller - MikroC ProDocument3 pagesGenerating PWM With PIC Microcontroller - MikroC Proemilfrancu100% (1)
- Ic Tester ReportDocument44 pagesIc Tester Reportamit101192100% (1)
- 8051 Programming in CDocument15 pages8051 Programming in CmohitNo ratings yet
- AbcdDocument5 pagesAbcdkumarchaturvedulaNo ratings yet
- 1 Bit, 2 Bit and 4 Bit ComparatorDocument5 pages1 Bit, 2 Bit and 4 Bit ComparatorMohd. Vaseem100% (1)
- 8051MICROCONTROLLER BASED GAS AND FIRE ALARM SYSTEM+pptDocument38 pages8051MICROCONTROLLER BASED GAS AND FIRE ALARM SYSTEM+pptBhuwon ArjunNo ratings yet
- Project ReportDocument11 pagesProject Reportamiethurgat100% (2)
- If-Else: 1. Illustrate The Different Types of Control Flow Statements Available in Python With FlowchartsDocument14 pagesIf-Else: 1. Illustrate The Different Types of Control Flow Statements Available in Python With Flowcharts18cse137 navneetkumarshuklaNo ratings yet
- 8051 Unit 1 NotesDocument19 pages8051 Unit 1 NotesSOMESH B S100% (13)
- Interfacing of 16x2 LCD With 8051 MicrocontrollerDocument7 pagesInterfacing of 16x2 LCD With 8051 MicrocontrollerVinothkumar Uruman100% (1)
- DSD VHDL Ch5Document23 pagesDSD VHDL Ch5ftkoayNo ratings yet
- SM ChartsDocument13 pagesSM ChartsNagarajan NatarajanNo ratings yet
- EE 360M - Digital Systems Design Using VHDL: Lizy K. John University of Texas at AustinDocument73 pagesEE 360M - Digital Systems Design Using VHDL: Lizy K. John University of Texas at AustindnachegariNo ratings yet
- 09-Logic Design With ASM Chart-11-07Document58 pages09-Logic Design With ASM Chart-11-07Sandeep ChaudharyNo ratings yet
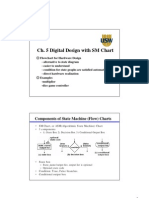
- Digital Design With SM ChartsDocument26 pagesDigital Design With SM ChartsAmar NathNo ratings yet
- Bai 15 - ADC and DAC On Spartan 3E Starter BoardDocument6 pagesBai 15 - ADC and DAC On Spartan 3E Starter BoardNguyễn Hữu DuyNo ratings yet
- RGB Generator Using VHDLDocument18 pagesRGB Generator Using VHDLameeraldujaily1999No ratings yet
- Lab 04Document6 pagesLab 04Bodour MohamedNo ratings yet
- PS2Document3 pagesPS2binhnhi0007No ratings yet
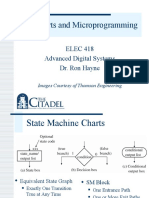
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocument38 pagesSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22No ratings yet
- Lab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeDocument20 pagesLab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeSikandar AliNo ratings yet
- 2018-CE-124 - Lab 6 - CE408Document7 pages2018-CE-124 - Lab 6 - CE408Ashar AslamNo ratings yet
- Experiment 20: infrared remote control: 1、Infrared receiving head introductionDocument8 pagesExperiment 20: infrared remote control: 1、Infrared receiving head introductionSahbi Marrouchi100% (1)
- State Graphs For Control NetworksDocument37 pagesState Graphs For Control Networksashudiya100% (1)
- Week #6 - Verilog Behavioural Modeling (Part 4) FSMDocument21 pagesWeek #6 - Verilog Behavioural Modeling (Part 4) FSMKhayrinNajmiNo ratings yet
- UNIT-I Digital System DesignDocument28 pagesUNIT-I Digital System DesignNarasimha Murthy YayavaramNo ratings yet
- FSM, Asm, FSMD, Asmd: EECE-4740/5740 Advanced VHDL and FPGA DesignDocument34 pagesFSM, Asm, FSMD, Asmd: EECE-4740/5740 Advanced VHDL and FPGA DesignCuong PhamNo ratings yet
- Lab 5 - A VHDL Reaction TimerDocument10 pagesLab 5 - A VHDL Reaction TimerMayank AgarwalNo ratings yet
- Eee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsDocument27 pagesEee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsPraveen MeduriNo ratings yet
- Midterm Project: EEDG 6306 - Application Specific Integrated Circuit DesignDocument6 pagesMidterm Project: EEDG 6306 - Application Specific Integrated Circuit Designafrica threeNo ratings yet
- Dr.Y.Narasimha Murthy. PH.DDocument28 pagesDr.Y.Narasimha Murthy. PH.DGoutham Devisetty100% (1)
- Lab 11 DLDDocument10 pagesLab 11 DLDMuneeb ahmadNo ratings yet
- Digital Design and Synthesis: Fall 09Document35 pagesDigital Design and Synthesis: Fall 09Lua Dinh ThiNo ratings yet
- Beginning FPGA Programming - Partie72Document5 pagesBeginning FPGA Programming - Partie72ali alilouNo ratings yet
- DTE Question Bank SolutionDocument15 pagesDTE Question Bank SolutionkhantaukirhasanNo ratings yet
- 8 Bit Hex To Decimal ConversionDocument20 pages8 Bit Hex To Decimal ConversionManoj Kavedia100% (1)
- Dice Game in VHDLDocument6 pagesDice Game in VHDLhassan ullah khanNo ratings yet
- Top 5 Sold Product in Terms of Sales (Opening Stock - Stock Left)Document2 pagesTop 5 Sold Product in Terms of Sales (Opening Stock - Stock Left)mohitNo ratings yet
- Case Study Retail StoreDocument3 pagesCase Study Retail StoremohitNo ratings yet
- Kuku ResumeDocument2 pagesKuku ResumemohitNo ratings yet
- YTL - Supply Chain Management:: - Location: Anywhere Across Airtel Locations in South Asia and AfricaDocument1 pageYTL - Supply Chain Management:: - Location: Anywhere Across Airtel Locations in South Asia and AfricamohitNo ratings yet
- Blood PressureDocument6 pagesBlood PressuremohitNo ratings yet
- VivekrDocument1 pageVivekrmohitNo ratings yet
- Digital Adder Circuits: A Review of Power, Delay, Area, and Transistor CountDocument15 pagesDigital Adder Circuits: A Review of Power, Delay, Area, and Transistor CountDeepak SharmaNo ratings yet
- Intel x86 FamilyDocument34 pagesIntel x86 Familyamolkore1375No ratings yet
- Cf-52 PanasonicDocument87 pagesCf-52 PanasonicДрагиша Небитни ТрифуновићNo ratings yet
- Lab 1 Spring 13Document3 pagesLab 1 Spring 13Kumaraguru RauNo ratings yet
- AN6 BIOS RecoveryDocument12 pagesAN6 BIOS RecoverySantiago GallingerNo ratings yet
- Ryans Product Book-August 2016-Issue 91Document52 pagesRyans Product Book-August 2016-Issue 91Ryans Computers Ltd.No ratings yet
- Switch Fabrics 1: "Centralized" Vs Distributed SwitchesDocument4 pagesSwitch Fabrics 1: "Centralized" Vs Distributed SwitchesImdad UllahNo ratings yet
- Digital Logic GatesDocument57 pagesDigital Logic GatesAbdullah Al AsikNo ratings yet
- Unit 1: Fundamentals of Programmable DSPS: Bhooshan HumaneDocument60 pagesUnit 1: Fundamentals of Programmable DSPS: Bhooshan HumaneFirozNo ratings yet
- Digital Logic Design Lab ManualDocument55 pagesDigital Logic Design Lab ManualEngr Zaryab WarraichNo ratings yet
- Power Theft Detection Using Wireless System-LibreDocument7 pagesPower Theft Detection Using Wireless System-LibreEnvisage123No ratings yet
- TMS320C6713 Digital Signal ProcessorDocument4 pagesTMS320C6713 Digital Signal ProcessorAsit ParidaNo ratings yet
- SH (Na) 80118-A Sw5-Gotr-O (Sys) - e Operation Manual PDFDocument238 pagesSH (Na) 80118-A Sw5-Gotr-O (Sys) - e Operation Manual PDFgsNo ratings yet
- Lenovo ThinkPad T510 W510 (Discrete) Wistron Kendo-1 WSDocument92 pagesLenovo ThinkPad T510 W510 (Discrete) Wistron Kendo-1 WSdanielradu27No ratings yet
- Xps 8930 Desktop Service Manual en UsDocument142 pagesXps 8930 Desktop Service Manual en UsgwzglNo ratings yet
- Primer - eBook-ENG PDFDocument370 pagesPrimer - eBook-ENG PDFAnonymous wCszHgNo ratings yet
- Basic Parts of A Computer: - Monitor - Keyboard - Mouse - System UnitDocument35 pagesBasic Parts of A Computer: - Monitor - Keyboard - Mouse - System UnitShenny CariscalNo ratings yet
- Several Requirements For This TopicDocument7 pagesSeveral Requirements For This TopicmaheshjNo ratings yet
- (123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuDocument71 pages(123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuNguyễn Hoàng HảiNo ratings yet
- Unit 2Document69 pagesUnit 2Sannu KumarNo ratings yet
- Intel Desktop Board D845GBV Product Supplement Specification UpdateDocument15 pagesIntel Desktop Board D845GBV Product Supplement Specification Updateleonardo sanabriaNo ratings yet
- Comparch Lab4Document11 pagesComparch Lab4Hưng Nguyễn ThànhNo ratings yet
- NXP MicroprocessorsDocument2 pagesNXP MicroprocessorsAnonymous 4IEjocNo ratings yet
- Sanda MarinDocument3 pagesSanda Marinanon-6542390% (6)
- DS3695 Multipoint RS485 RS422 Transceivers RepeatersDocument17 pagesDS3695 Multipoint RS485 RS422 Transceivers RepeatersJuan Gil Roca100% (1)
- Sense AmpDocument2 pagesSense AmptsikboyNo ratings yet
- Asus Laptop SchematicsDocument50 pagesAsus Laptop SchematicsRaju KhajjidoniNo ratings yet
- 39fc0 Compal LA-6501PDocument36 pages39fc0 Compal LA-6501PIon PetruscaNo ratings yet
- Spartan-3E FPGA Family: Complete Data Sheet: Introduction and Ordering Information DC and Switching CharacteristicsDocument193 pagesSpartan-3E FPGA Family: Complete Data Sheet: Introduction and Ordering Information DC and Switching CharacteristicsDaniel RodriguezNo ratings yet