You might also like
- PDF Electronics For Beginners A Practical Introduction To Schematics Circuits and Microcontrollers Jonathan Bartlett Ebook Full ChapterDocument53 pagesPDF Electronics For Beginners A Practical Introduction To Schematics Circuits and Microcontrollers Jonathan Bartlett Ebook Full Chapterdeborah.friesen309100% (3)
- Think1 Teacher's BookDocument143 pagesThink1 Teacher's BookBarbara Underwood100% (4)
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- As 1580.0-2004 Paints and Related Materials - Methods of Test - Part 0 Introduction and List of MethodsDocument17 pagesAs 1580.0-2004 Paints and Related Materials - Methods of Test - Part 0 Introduction and List of Methodsardansyahputra0% (2)
- Testing For Crash & Safety SimulationDocument39 pagesTesting For Crash & Safety Simulationlobo1684No ratings yet
- LS-DYNA Material TableDocument15 pagesLS-DYNA Material TablePuneet BahriNo ratings yet
- Slam AnalysisDocument2 pagesSlam AnalysisfrecciaaaNo ratings yet
- 3.0 Material Modeling Guidelines-V11-1 PDFDocument33 pages3.0 Material Modeling Guidelines-V11-1 PDFRahul MahajanNo ratings yet
- LS Dyna Tutorial FEADocument16 pagesLS Dyna Tutorial FEAsravis69No ratings yet
- NVH CAE Concept Modelling and Optimization at BMWDocument23 pagesNVH CAE Concept Modelling and Optimization at BMWSuyash Thorat-Gadgil100% (1)
- Pad LEEA-048 Guidance On The Design Testing and Inspection of Fabricated Pad EyesDocument3 pagesPad LEEA-048 Guidance On The Design Testing and Inspection of Fabricated Pad EyesAnirudh S. Goel86% (7)
- Schneider Protection Application GuideDocument293 pagesSchneider Protection Application GuideFrancisco Martinez100% (1)
- 10 Session19and20 LS-DYNA3Document71 pages10 Session19and20 LS-DYNA3Chandra ClarkNo ratings yet
- Time Step Size - LS-DYNA Support PDFDocument4 pagesTime Step Size - LS-DYNA Support PDFHemanth SarabuNo ratings yet
- Lsdyna User GroupDocument11 pagesLsdyna User GroupPunith MlNo ratings yet
- List of Finite Elements Ls-Dyna PDFDocument36 pagesList of Finite Elements Ls-Dyna PDFFABIAN FIENGONo ratings yet
- Elements in Ls Dyna PDFDocument70 pagesElements in Ls Dyna PDFEren KalayNo ratings yet
- 08 Session15and16 LS-DYNA1Document32 pages08 Session15and16 LS-DYNA1vinod reddy mNo ratings yet
- Introduction To LS-DYNA MPP&RestartDocument38 pagesIntroduction To LS-DYNA MPP&Restart임종윤No ratings yet
- Tie Break Contact in Ls-DynaDocument33 pagesTie Break Contact in Ls-Dynamr.aikido100% (2)
- 10 1 1 117Document9 pages10 1 1 117kasreedharNo ratings yet
- 05 2016 02 DYNAmore Infotag Implizit TipsTricksDocument32 pages05 2016 02 DYNAmore Infotag Implizit TipsTricksPeter ZubarikNo ratings yet
- Impact Analysis Using LS-Dyna: TutorialDocument29 pagesImpact Analysis Using LS-Dyna: TutorialSumit SehgalNo ratings yet
- Radioss Theory Manual: 12.0 Version - Nov 2012 Large Displacement Finite Element AnalysisDocument52 pagesRadioss Theory Manual: 12.0 Version - Nov 2012 Large Displacement Finite Element AnalysisM Muslem AnsariNo ratings yet
- Finite Element Procedures For Nonlinear Analysis Lagrangian and Eulerian Formulations of 1DDocument40 pagesFinite Element Procedures For Nonlinear Analysis Lagrangian and Eulerian Formulations of 1DtechNo ratings yet
- Element Type LS-DYNADocument7 pagesElement Type LS-DYNAاحمد تسنیمNo ratings yet
- Contatc Definition in LS-DynaDocument34 pagesContatc Definition in LS-DynaMr PolashNo ratings yet
- Ls Dyna BeamsDocument18 pagesLs Dyna BeamsAleem Ullah CheemaNo ratings yet
- LS-DYNA Introductory Oct 30 Nov 1-2012Document328 pagesLS-DYNA Introductory Oct 30 Nov 1-2012unmeshNo ratings yet
- Non-Linear Analyses Using LS-DYNA ImplicitDocument28 pagesNon-Linear Analyses Using LS-DYNA ImplicitAref AbadelNo ratings yet
- Ls Dyna Mat ComposDocument21 pagesLs Dyna Mat ComposStefano CanestrelliNo ratings yet
- Explicit Dynamics FeaturesDocument7 pagesExplicit Dynamics Featuresom12315No ratings yet
- Implicit NewerDocument207 pagesImplicit NewerThutchai PhoNo ratings yet
- Contact Modeling in LSDynaDocument25 pagesContact Modeling in LSDynaHasan M RangwalaNo ratings yet
- 1d Meshing Optistruct HypermeshDocument9 pages1d Meshing Optistruct Hypermeshtirupathi balajiNo ratings yet
- LS DynaDocument3 pagesLS DynaKadir Alf GünaydınNo ratings yet
- Contact Modelling in LSDYNADocument35 pagesContact Modelling in LSDYNASidharth PothalNo ratings yet
- AdvFem Meshfree 2016classDocument282 pagesAdvFem Meshfree 2016classzack100% (1)
- Ls Dyna Ls Prepost TutorialDocument33 pagesLs Dyna Ls Prepost TutorialAgus Wijaya0% (1)
- Simcenter 3D 2020.1 - Structures - What's NewDocument27 pagesSimcenter 3D 2020.1 - Structures - What's NewThanakorn VichiensamuthNo ratings yet
- 6 Composites Modelling LS-DYNA Galal-Mohamed-InDocument71 pages6 Composites Modelling LS-DYNA Galal-Mohamed-InSathi MechNo ratings yet
- Spin Softening N Stress StiffeningDocument23 pagesSpin Softening N Stress StiffeningaruatscribdNo ratings yet
- Implicit Analysis Intro 02-2011Document50 pagesImplicit Analysis Intro 02-2011Jhony GolombieskiNo ratings yet
- HypermeshDocument109 pagesHypermeshAbdel DaaNo ratings yet
- LS-DYNA Concrete MaterialDocument3 pagesLS-DYNA Concrete MaterialaktcNo ratings yet
- LS-PrePost Intro 2016Document138 pagesLS-PrePost Intro 2016Ray FaiersNo ratings yet
- LS-PrePost Intro 073012Document368 pagesLS-PrePost Intro 073012stingreyNo ratings yet
- LS-DYNA AnalysisDocument29 pagesLS-DYNA AnalysisJohn TerryNo ratings yet
- Brake Analysis and NVH Optimization Using MSC - nastRANDocument15 pagesBrake Analysis and NVH Optimization Using MSC - nastRANMihir ShahNo ratings yet
- LS-DYNA Guidelines Composite MaterialsDocument21 pagesLS-DYNA Guidelines Composite MaterialsM k i100% (1)
- LS-DYNA Basic Training: Input Deck Structure Basic Cards V1.0Document30 pagesLS-DYNA Basic Training: Input Deck Structure Basic Cards V1.0anmol6237No ratings yet
- Ls Prepost TutorialDocument161 pagesLs Prepost Tutorialkristeen78No ratings yet
- Chapter 3 Composite ModelingDocument57 pagesChapter 3 Composite ModelingCaio AlbuquerqueNo ratings yet
- LS Dyna TutorialDocument16 pagesLS Dyna TutorialSumit SehgalNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsFrom EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNo ratings yet
- Crash GuidelinesDocument6 pagesCrash Guidelinesvivek rathodNo ratings yet
- Qseries AS4600Document13 pagesQseries AS4600pengswanNo ratings yet
- Manual For Modulus of Rupture Flexural Test (4-Pt Bending) of 6x6 InchDocument5 pagesManual For Modulus of Rupture Flexural Test (4-Pt Bending) of 6x6 InchjjaavenidoNo ratings yet
- Clifford Stott and Geoff Pearson London: Pennant Books, 2007. 345 Pp. 17.99. ISBN 1906015058. Reviewed by ANTHONY KING, University of Exeter, UKDocument5 pagesClifford Stott and Geoff Pearson London: Pennant Books, 2007. 345 Pp. 17.99. ISBN 1906015058. Reviewed by ANTHONY KING, University of Exeter, UKiuliaNo ratings yet
- Ims QuestionDocument10 pagesIms QuestionPavel ViktorNo ratings yet
- Expo Log IntegrationDocument5 pagesExpo Log IntegrationMatthew JordanNo ratings yet
- Ralph and Simon (Lord of The Flies)Document3 pagesRalph and Simon (Lord of The Flies)Fatima SiddiqueNo ratings yet
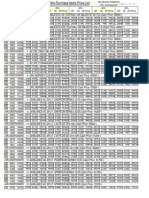
- PriceListHirePurchase Normal3august2020Document69 pagesPriceListHirePurchase Normal3august2020waqar ahmadNo ratings yet
- Scooba 390 Manual and QSGDocument17 pagesScooba 390 Manual and QSGCesar PinedoNo ratings yet
- T Rec L.1221 201811 I!!pdf eDocument58 pagesT Rec L.1221 201811 I!!pdf eShahriar AhmedNo ratings yet
- Chapter 2 FluidDocument29 pagesChapter 2 FluidLeonard TanNo ratings yet
- UniSim Plate Fin Exchanger Modeler PIN PDFDocument2 pagesUniSim Plate Fin Exchanger Modeler PIN PDFmember1000No ratings yet
- TOTAL Welding Control Procedure Rev.2 PDFDocument116 pagesTOTAL Welding Control Procedure Rev.2 PDFWenney N Pali100% (1)
- Biopore Infiltration HolesDocument4 pagesBiopore Infiltration Holesdy_ra_ve2797No ratings yet
- Booklet Business Plan 2020 v3.0 Amend As of 021219Document131 pagesBooklet Business Plan 2020 v3.0 Amend As of 021219Zamizan BNo ratings yet
- Nema A, B, C and D DesignDocument3 pagesNema A, B, C and D Designsteve_y100% (1)
- Macmillan Science Level 6 Pupil S Book Unit 1 PP 11 16Document6 pagesMacmillan Science Level 6 Pupil S Book Unit 1 PP 11 16reema2050reemaNo ratings yet
- C5-Mechanical Propertise of Hardened Concrete Base On Sample Made in C4Document8 pagesC5-Mechanical Propertise of Hardened Concrete Base On Sample Made in C4Muhammad khairinNo ratings yet
- Installer's Guide: Home Standby GeneratorDocument36 pagesInstaller's Guide: Home Standby GeneratorFabian ZamudioNo ratings yet
- Differential Equation MathsDocument45 pagesDifferential Equation MathsPavan Boro100% (2)
- The 12 Agile Project Management PrinciplesDocument4 pagesThe 12 Agile Project Management PrinciplesVelpandian ManiNo ratings yet
- Child and AdolescentsDocument11 pagesChild and AdolescentsIan Khierwin PalacpacNo ratings yet
- Diagnostic Grammar Test-CopiarDocument6 pagesDiagnostic Grammar Test-CopiarJuliana PachonNo ratings yet
- Hareda 427466857Document86 pagesHareda 427466857Abhishek HandaNo ratings yet
- 03 SM-Series Hardware (SM150)Document81 pages03 SM-Series Hardware (SM150)John WickNo ratings yet
- Product Safety Data Sheet: 52820 Master FormDocument4 pagesProduct Safety Data Sheet: 52820 Master FormIn liongNo ratings yet
- Tutorial SEE-Electrical V8R1Document59 pagesTutorial SEE-Electrical V8R1Jovica ProdanoskiNo ratings yet
- Physics of MaterialsDocument237 pagesPhysics of MaterialsNivashini VindhyaNo ratings yet
- Final Exam Question 172 CSI217 ND MIHnDocument2 pagesFinal Exam Question 172 CSI217 ND MIHnParvej ahmedNo ratings yet