You might also like
- The Handbook of Formulas and Tables For Signal ProcessingDocument8 pagesThe Handbook of Formulas and Tables For Signal ProcessingPrakash BachaniNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Frequency Response AnalysisDocument33 pagesFrequency Response AnalysisShiraz HusainNo ratings yet
- Frequency Response Analysis: Section 6Document45 pagesFrequency Response Analysis: Section 6Ahmed HassanNo ratings yet
- Wavelets (Chapter 7) : CS474/674 - Prof. BebisDocument109 pagesWavelets (Chapter 7) : CS474/674 - Prof. Bebissrc0108No ratings yet
- 110 Semiconductor Projects for the Home ConstructorFrom Everand110 Semiconductor Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Discrete-Time IIR Filter Design From Continuous-Time FiltersDocument16 pagesDiscrete-Time IIR Filter Design From Continuous-Time FiltersstudentNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Mapping Between Z Plane and S PlaneDocument15 pagesMapping Between Z Plane and S Planeamanpanghal67% (3)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Equation Form RomerDocument23 pagesEquation Form Romerfarsad1383No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Introduction To Discrete Time Systems and The Z TransformDocument93 pagesIntroduction To Discrete Time Systems and The Z TransformRaufzha AnandaNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Frequency ResponseDocument30 pagesFrequency ResponseGovind KumarNo ratings yet
- Chapter 4 Retiming: 1 ECE734 VLSI Arrays For Digital Signal ProcessingDocument24 pagesChapter 4 Retiming: 1 ECE734 VLSI Arrays For Digital Signal ProcessingaravinthcpNo ratings yet
- Module 2 - 2Document68 pagesModule 2 - 2abcdNo ratings yet
- ECEN5807Document32 pagesECEN5807Mike WongNo ratings yet
- Lecture7 Ee689 Eq Intro TxeqDocument27 pagesLecture7 Ee689 Eq Intro TxeqdogudoguNo ratings yet
- 446-05 Laplace II (N) - HandoutDocument8 pages446-05 Laplace II (N) - HandoutIrfan MahyunisNo ratings yet
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Interpolation & Decimation: - Sampling Period at The OutputDocument32 pagesInterpolation & Decimation: - Sampling Period at The OutputAnand Krishna GhattyNo ratings yet
- 14 Interpolation DecimationDocument32 pages14 Interpolation DecimationSanjay BalwaniNo ratings yet
- Wavelet TransformDocument27 pagesWavelet TransformMuhammad Salman100% (1)
- ControlSystem2 PDFDocument40 pagesControlSystem2 PDFBùi MTriếtNo ratings yet
- RetimingDocument24 pagesRetiminggalaxystarNo ratings yet
- Course 18.327 and 1.130 Wavelets and Filter BanksDocument12 pagesCourse 18.327 and 1.130 Wavelets and Filter Banksdjoseph_1No ratings yet
- Stata Lab4 2023Document36 pagesStata Lab4 2023Aadhav JayarajNo ratings yet
- Groundwater Modeling: Finite Element MethodDocument32 pagesGroundwater Modeling: Finite Element Methodmaribo2005No ratings yet
- COMM 602: Digital Signal ProcessingDocument32 pagesCOMM 602: Digital Signal ProcessingMohamed YaseenNo ratings yet
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDocument50 pagesIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiNo ratings yet
- Modern Control Sys-Lecture Vi PDFDocument46 pagesModern Control Sys-Lecture Vi PDFMtanzania MtanzaniaNo ratings yet
- An Introduction To Discrete Wavelet TransformsDocument36 pagesAn Introduction To Discrete Wavelet TransformsAtacan ÖzkanNo ratings yet
- Lecture # 4: Communication SystemsDocument17 pagesLecture # 4: Communication SystemsKhalid MajeedNo ratings yet
- DigitalControlSystems Lecture 1 PDFDocument50 pagesDigitalControlSystems Lecture 1 PDFShafayet UddinNo ratings yet
- Control Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument72 pagesControl Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- ELEC4410 Control System Design Revision NotesDocument10 pagesELEC4410 Control System Design Revision Notescjman404No ratings yet
- Chapter 2.2 Response Ist Order SystemsDocument30 pagesChapter 2.2 Response Ist Order SystemsSyed AliNo ratings yet
- EPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityDocument58 pagesEPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityTan Yong LiangNo ratings yet
- FIR and IIR Filter AsdsaDocument55 pagesFIR and IIR Filter AsdsaShanmuka ReddyNo ratings yet
- Lecture 8: From Analog To Digital Controllers, PID Control Design ApproachesDocument10 pagesLecture 8: From Analog To Digital Controllers, PID Control Design ApproachesarafatasgharNo ratings yet
- IIR Digital Filter Design: Standard ApproachDocument27 pagesIIR Digital Filter Design: Standard ApproachAshok GadhwalNo ratings yet
- I. Concepts and Tools: Mathematics For Dynamic SystemsDocument48 pagesI. Concepts and Tools: Mathematics For Dynamic SystemsRaveendhra IitrNo ratings yet
- Process Dynamics and Control SolutionsDocument22 pagesProcess Dynamics and Control Solutionsciotti620988% (8)
- First Order and Integrator Dynamical System: Laboratory Experiment No.1Document8 pagesFirst Order and Integrator Dynamical System: Laboratory Experiment No.1Rodrigo TavarezNo ratings yet
- Sinusoidal Response.: S A S XDocument15 pagesSinusoidal Response.: S A S XManidhar ThulaNo ratings yet
- The Ramsey-Cass-Koopmans Model: Romer (2001), Ch. 2, Part ADocument8 pagesThe Ramsey-Cass-Koopmans Model: Romer (2001), Ch. 2, Part ATan AdelineNo ratings yet
- Z Transform 2 of 3Document18 pagesZ Transform 2 of 3Gilbert SigalaNo ratings yet
- 2D and 3D TransformationDocument42 pages2D and 3D Transformationachintya0105No ratings yet
- Lecture 14Document35 pagesLecture 14AhsabNo ratings yet
- 3d TransformationDocument33 pages3d TransformationMd Minhazur RahmanNo ratings yet
- 5-1 Introduction: Chapter 5 The Laplace TransformDocument29 pages5-1 Introduction: Chapter 5 The Laplace TransformRatna Priya SinghNo ratings yet
- SignalsDocument3 pagesSignalsBerentoNo ratings yet
- Notes 03 - Nyquist PlotsDocument3 pagesNotes 03 - Nyquist PlotsJai GaizinNo ratings yet
- Process Dynamics and Control, Ch. 8 Solution ManualDocument12 pagesProcess Dynamics and Control, Ch. 8 Solution ManualBen SpearmanNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T yshahriaraustNo ratings yet
- 12-Bit, 500-/550-MSPS Analog-to-Digital Converters: FeaturesDocument49 pages12-Bit, 500-/550-MSPS Analog-to-Digital Converters: FeaturesJuan BoggianoNo ratings yet
- 12-Bit, 500-/550-MSPS Analog-to-Digital Converters: FeaturesDocument49 pages12-Bit, 500-/550-MSPS Analog-to-Digital Converters: FeaturesJuan BoggianoNo ratings yet
- Ad8646 8648 PDFDocument18 pagesAd8646 8648 PDFJuan BoggianoNo ratings yet
- Adc14x250 PDFDocument70 pagesAdc14x250 PDFJuan BoggianoNo ratings yet
- tps768 q1 PDFDocument28 pagestps768 q1 PDFJuan BoggianoNo ratings yet
- Adc12j2700 PDFDocument100 pagesAdc12j2700 PDFJuan BoggianoNo ratings yet
- Isl71026m PDFDocument32 pagesIsl71026m PDFJuan BoggianoNo ratings yet
- Adc14x250 PDFDocument70 pagesAdc14x250 PDFJuan BoggianoNo ratings yet
- Adc12j2700 PDFDocument100 pagesAdc12j2700 PDFJuan BoggianoNo ratings yet
- Ad8646 8648 PDFDocument18 pagesAd8646 8648 PDFJuan BoggianoNo ratings yet
- Design - Consideratons Design Note 9Document4 pagesDesign - Consideratons Design Note 9Juan BoggianoNo ratings yet
- SoC RfPIC12F675 Data SheetDocument136 pagesSoC RfPIC12F675 Data SheetJuan BoggianoNo ratings yet
- Technical Article: How To Connect and Test A Proportional ModelDocument2 pagesTechnical Article: How To Connect and Test A Proportional ModelJuan BoggianoNo ratings yet
- JWE08 Series XXX Series: 8 WattsDocument3 pagesJWE08 Series XXX Series: 8 WattsJuan BoggianoNo ratings yet
- 15/20 Watts JCM Series: SpecificationDocument2 pages15/20 Watts JCM Series: SpecificationJuan BoggianoNo ratings yet
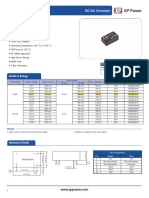
- 5-30 Watts MTC Series: SpecificationDocument5 pages5-30 Watts MTC Series: SpecificationJuan BoggianoNo ratings yet
- RFSAS20EDRMDocument76 pagesRFSAS20EDRMJuan BoggianoNo ratings yet
- Signal Chain For Noise Figure AnalysisDocument14 pagesSignal Chain For Noise Figure AnalysisJuan BoggianoNo ratings yet
- IEC 60870-5-104 - The New Solution For Communication in SubstationsDocument5 pagesIEC 60870-5-104 - The New Solution For Communication in SubstationsrmbalcobiaNo ratings yet
- Product Description ED1608 v1.06Document10 pagesProduct Description ED1608 v1.06Juan BoggianoNo ratings yet
- Ad8646 8648 PDFDocument18 pagesAd8646 8648 PDFJuan BoggianoNo ratings yet
- DDS FundamentalsDocument9 pagesDDS Fundamentalsdeval_kumarNo ratings yet
- Signal Chain For Noise Figure AnalysisDocument14 pagesSignal Chain For Noise Figure AnalysisJuan BoggianoNo ratings yet
- 3HE06623AAAATQZZA01 - V1 - Alcatel-Lucent 7705 SAR Command Line Interface Quick Reference CardDocument2 pages3HE06623AAAATQZZA01 - V1 - Alcatel-Lucent 7705 SAR Command Line Interface Quick Reference CardJuan BoggianoNo ratings yet
- Frequency Allocation ChartDocument1 pageFrequency Allocation Chartravifireblade8402No ratings yet
- 3HE06603AAABTQZZA01 - V1 - Alcatel-Lucent 7705 SAR Release 5.0 Read Me First - Documentation Set OverviewDocument6 pages3HE06603AAABTQZZA01 - V1 - Alcatel-Lucent 7705 SAR Release 5.0 Read Me First - Documentation Set OverviewJuan BoggianoNo ratings yet
- Tms 320 F 28 PLC 83Document132 pagesTms 320 F 28 PLC 83Juan BoggianoNo ratings yet
- Smart Grid SolutionsDocument19 pagesSmart Grid SolutionsJuan BoggianoNo ratings yet
- Experiment 8: FM DemodulatorDocument20 pagesExperiment 8: FM Demodulatorslay17No ratings yet
- DWDMDocument45 pagesDWDMJuan BoggianoNo ratings yet
- Length and Time-NotesDocument6 pagesLength and Time-NotesBalasbramani ThangavelNo ratings yet
- BRAUN A5S0-Manual ENDocument20 pagesBRAUN A5S0-Manual ENSureshNo ratings yet
- JEE Class Companion Physics: Module-2Document167 pagesJEE Class Companion Physics: Module-2The IndianNo ratings yet
- RadioisotopeDocument10 pagesRadioisotopeSuba SriNo ratings yet
- HVAC Handbook HVAC Design Brief (Singapore)Document26 pagesHVAC Handbook HVAC Design Brief (Singapore)Sam Wing Hong50% (2)
- Volcanic Plumes PDFDocument254 pagesVolcanic Plumes PDFmichgeb100% (1)
- AIR BEARINGS - Review and ApplicationsDocument25 pagesAIR BEARINGS - Review and ApplicationsSubhamMohantyNo ratings yet
- Chem Lab - A Velocity Constant TitrationDocument6 pagesChem Lab - A Velocity Constant TitrationMiguel Ackah-Yensu50% (2)
- Eriez Sl08 Lifting Magnets BrochureDocument24 pagesEriez Sl08 Lifting Magnets Brochuredante224No ratings yet
- PowerGen Europe Final PDFDocument24 pagesPowerGen Europe Final PDFAnonymous knICaxNo ratings yet
- L Inverted Siphon 3rd CDocument6 pagesL Inverted Siphon 3rd CPreston VargheseNo ratings yet
- Random Variables and Stochastic Processes - April-2016Document4 pagesRandom Variables and Stochastic Processes - April-2016rajeshkumar_niceNo ratings yet
- Desain Dan Simulasi Elemen Hingga Gantry Crane Kapasitas 9 Ton Menggunakan Autodesk Inventor 2017Document9 pagesDesain Dan Simulasi Elemen Hingga Gantry Crane Kapasitas 9 Ton Menggunakan Autodesk Inventor 2017Samuel Panda PotanNo ratings yet
- Cae Analysis and Structure Optimization Design of Injection Mold For Charge Upper Cover IJERTV8IS110007Document4 pagesCae Analysis and Structure Optimization Design of Injection Mold For Charge Upper Cover IJERTV8IS110007mubarakNo ratings yet
- Mm326 System Dynamics Hw3 SolutionDocument7 pagesMm326 System Dynamics Hw3 SolutionOğulcan AytaçNo ratings yet
- Loading VSP As A SyntheticDocument2 pagesLoading VSP As A SyntheticAlfian AminNo ratings yet
- Mechanical and Thermal Properties of Perlite and RDocument8 pagesMechanical and Thermal Properties of Perlite and RSheilaNo ratings yet
- Venus 001Document21 pagesVenus 001Abinava ChandrikaNo ratings yet
- Adsorption by BhanuDocument20 pagesAdsorption by BhanuHiren vaghaniNo ratings yet
- Directions For Howard Miller Weather Instruments: Barometer ThermometerDocument2 pagesDirections For Howard Miller Weather Instruments: Barometer ThermometerJaime FuentesNo ratings yet
- Addressing Some Issues in Drop Weight Testing - A Material Science ApproachDocument16 pagesAddressing Some Issues in Drop Weight Testing - A Material Science ApproachManish BhadauriaNo ratings yet
- Ef 402 IntroDocument2 pagesEf 402 Introuwang uwangNo ratings yet
- Differentiation Revision (2020) : Prepared by T. PondoDocument7 pagesDifferentiation Revision (2020) : Prepared by T. PondoCourteney LungileNo ratings yet
- Turning On A PivotDocument12 pagesTurning On A PivotMinahil WaqarNo ratings yet
- Kuliah 3-HIDROGRAFIDocument16 pagesKuliah 3-HIDROGRAFIaizatNo ratings yet
- Questions and Speculation On Learning and Cohomology, Version 3Document136 pagesQuestions and Speculation On Learning and Cohomology, Version 3Hrittik RoyNo ratings yet
- Design and Analysis of High Pressure Door With Stiffened PlateDocument12 pagesDesign and Analysis of High Pressure Door With Stiffened PlateSyed Faiz Quadri100% (1)
- Introduction To Atomic and Quantum Physics - Sommerfeld TheoryDocument5 pagesIntroduction To Atomic and Quantum Physics - Sommerfeld TheorySrinivas SaiNo ratings yet
- Corrosion MonitoringDocument8 pagesCorrosion MonitoringEleonoraNo ratings yet
- Stability of Slopes: Dr. Sayed Mohamed ElarabyDocument38 pagesStability of Slopes: Dr. Sayed Mohamed ElarabyTân BùiNo ratings yet