You might also like
- Solar Operated Grass CutterDocument12 pagesSolar Operated Grass CutterGorishsharma100% (1)
- Wireless Power TransmissionDocument19 pagesWireless Power TransmissionVarun Dabla0% (1)
- Water Level Indicator Using Iot Blynk App With Sms NotificationDocument7 pagesWater Level Indicator Using Iot Blynk App With Sms NotificationHassan AliNo ratings yet
- Solar based mini fridge for rural healthcareDocument12 pagesSolar based mini fridge for rural healthcareMUHAMMED FAISALNo ratings yet
- Final Project Report Foot Step (With Out Footer)Document47 pagesFinal Project Report Foot Step (With Out Footer)Deepak Raj R100% (3)
- Underwater Windmill Seminar ReportDocument37 pagesUnderwater Windmill Seminar ReportPappu Mala33% (3)
- MHD Power Generation ExplainedDocument15 pagesMHD Power Generation ExplainedMANN BATTISENo ratings yet
- A ProjectDocument9 pagesA Projectjnanesh tk100% (1)
- GurobusDocument24 pagesGurobuspraveenpv7No ratings yet
- The Ultrasonic Motor AbstractDocument28 pagesThe Ultrasonic Motor AbstractAnajkumarNo ratings yet
- Walk N Charge - FinalDocument15 pagesWalk N Charge - FinalKaushik ChakrabortyNo ratings yet
- Ultrasonic Motor AbstractDocument2 pagesUltrasonic Motor AbstractVishal Singh Rahangdale100% (2)
- Project ReportDocument65 pagesProject ReportMusical world100% (1)
- Seminar Report - Ultrasonic MotorDocument31 pagesSeminar Report - Ultrasonic MotorDurgesh Kumar100% (1)
- SRMDocument60 pagesSRMKrupa KaranNo ratings yet
- A SEMINAR REPORT On WIRELESS POWER TRANS PDFDocument29 pagesA SEMINAR REPORT On WIRELESS POWER TRANS PDFABHIJIT CHANDRANo ratings yet
- Seminar Report Solar TreeDocument30 pagesSeminar Report Solar TreeAshish Kumar100% (1)
- Magenn Air Rotor System (M.a.r.sDocument21 pagesMagenn Air Rotor System (M.a.r.sccritamNo ratings yet
- MPPT Based PV System For Partial ShadingDocument73 pagesMPPT Based PV System For Partial ShadingSwarnav MajumderNo ratings yet
- Paper Battery Seminar Report: Lightweight Power for IoT DevicesDocument17 pagesPaper Battery Seminar Report: Lightweight Power for IoT DevicesIshuNo ratings yet
- Project On Electricity Generator From Speed BreakersDocument50 pagesProject On Electricity Generator From Speed BreakersAlvi Mirza91% (11)
- Active Magnetic Bearing PDFDocument11 pagesActive Magnetic Bearing PDFSujan KumarNo ratings yet
- 1.protection of Busbar Distribution From Over LoadDocument4 pages1.protection of Busbar Distribution From Over LoadPooja BanNo ratings yet
- Universal - Current - Sensors - Report KARTHIKDocument23 pagesUniversal - Current - Sensors - Report KARTHIKKarthik SDNo ratings yet
- A Detailed Study On Power Generation Using Speed BreakersDocument5 pagesA Detailed Study On Power Generation Using Speed BreakersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligent Braking System - SynopsisDocument6 pagesIntelligent Braking System - SynopsisTanviNo ratings yet
- Foot Step Power GenerationDocument5 pagesFoot Step Power GenerationAbhishek Kumar0% (2)
- Power TheftDocument16 pagesPower TheftSreenu vasuNo ratings yet
- Cell Phone Operated Land Rover SynopsisDocument13 pagesCell Phone Operated Land Rover SynopsiscatkatiyarNo ratings yet
- Contact Less Energy Transfer SystemDocument28 pagesContact Less Energy Transfer SystemAditi Goyal100% (4)
- Vertical Axis Wind Turbine Project ReportDocument18 pagesVertical Axis Wind Turbine Project ReportJace Thompson100% (2)
- Power Generation Using Speed Breakers and Efficient Use of Energy Created by It.Document57 pagesPower Generation Using Speed Breakers and Efficient Use of Energy Created by It.Vaibhav KhareNo ratings yet
- Nano Wire Full ReportDocument21 pagesNano Wire Full Reportnikhil210492100% (1)
- Industrial Boiler Flame Remote Adjustment SystemDocument5 pagesIndustrial Boiler Flame Remote Adjustment SystemChandra Sekar100% (1)
- Solar BikeDocument16 pagesSolar BikeRobi Sixer Axial0% (1)
- Power Generation Through Speed BreakersDocument22 pagesPower Generation Through Speed BreakersSaikumar MysaNo ratings yet
- Solar Car Seminar ReportDocument30 pagesSolar Car Seminar ReportAamir Khan100% (1)
- GyrobusDocument24 pagesGyrobusajay kumar royNo ratings yet
- Major Project Shopping TrolleyDocument50 pagesMajor Project Shopping TrolleyRohith SharmaNo ratings yet
- Solar Mobile Charger Rural AreasDocument4 pagesSolar Mobile Charger Rural AreasYellaturi Siva Kishore ReddyNo ratings yet
- Seminar Report On: Visvesvaraya Technological UniversityDocument29 pagesSeminar Report On: Visvesvaraya Technological UniversityTejas Xd0% (1)
- A Major ProjectDocument27 pagesA Major ProjectJanak KishorNo ratings yet
- Electric Rocket EngineDocument26 pagesElectric Rocket EngineSanal Raj100% (1)
- Hybrid Power Full Seminar ReportDocument106 pagesHybrid Power Full Seminar ReportD Avi Na Sh100% (1)
- Final ReportDocument18 pagesFinal ReportYusha Patel100% (1)
- Train Tracking and Obstacle Detection SystemDocument26 pagesTrain Tracking and Obstacle Detection Systemeshu50% (2)
- Solar Tracker Using ArduinoDocument3 pagesSolar Tracker Using ArduinoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Seminar Report VACCUM BRAKING SYSTEM (1sb16me042)Document22 pagesSeminar Report VACCUM BRAKING SYSTEM (1sb16me042)Manasa100% (1)
- Android SOLAR GRASS CUTTER ReportDocument47 pagesAndroid SOLAR GRASS CUTTER ReportAnuj Tripathi80% (5)
- Main Project PrsDocument40 pagesMain Project PrsSabari NathanNo ratings yet
- Power Generation01Document20 pagesPower Generation01Jaya Prakash SeelamNo ratings yet
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocument75 pagesProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Introduction To Regenerative Braking SystemDocument6 pagesIntroduction To Regenerative Braking SystemdfgvdfsghdgfNo ratings yet
- Ultrasonic Motors: Department of Electrical&Electronics Engineering Jntua College of Engineering Anantapur (Anantapur)Document27 pagesUltrasonic Motors: Department of Electrical&Electronics Engineering Jntua College of Engineering Anantapur (Anantapur)Shaik Towheed BanuNo ratings yet
- Ultrasonic Motor 29122012193508 Ultrasonic MotorDocument21 pagesUltrasonic Motor 29122012193508 Ultrasonic MotorMuttu KonnurNo ratings yet
- 4 AdvDocument13 pages4 AdvHemanth SaiNo ratings yet
- Ultrasonic MotorDocument21 pagesUltrasonic Motorjyothsna123456100% (1)
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- ECE Ultrasonic Motor ReportDocument21 pagesECE Ultrasonic Motor ReportAbhishek GhateNo ratings yet
- Research Paper On Ultrasonic MotorDocument8 pagesResearch Paper On Ultrasonic Motorgzrvpcvnd100% (1)
- ProjectDocument41 pagesProjectHarshit Singh100% (1)
- SeminarDocument25 pagesSeminarSwapnajitRayNo ratings yet
- L1 Intro Final 05Document47 pagesL1 Intro Final 05mwaseem2011No ratings yet
- Supercon PDFDocument16 pagesSupercon PDFHarshit SinghNo ratings yet
- Surge Current Protection Using Superconducting Fault Current LimiterDocument24 pagesSurge Current Protection Using Superconducting Fault Current LimiterHarshit SinghNo ratings yet
- Ece Polyfuse ReportDocument24 pagesEce Polyfuse ReportHarshit SinghNo ratings yet
- Simulation of Bracket: Strength Analysis For The BracketDocument10 pagesSimulation of Bracket: Strength Analysis For The BracketGabriela PricopeNo ratings yet
- Polyisobutylene: A Most Unusual Polymer: AbstractDocument10 pagesPolyisobutylene: A Most Unusual Polymer: AbstractSamuelNo ratings yet
- Reinforced Concrete Beam Design ProblemsDocument5 pagesReinforced Concrete Beam Design ProblemsCeyn Lumabad0% (1)
- Azeotropic and Extractive DistillationDocument9 pagesAzeotropic and Extractive DistillationShahzaib IqbalNo ratings yet
- Chemical Reaction Engineering-II - R2015 - 13-11-2018Document2 pagesChemical Reaction Engineering-II - R2015 - 13-11-201818135A0806 MAKKUVA BHAVYANo ratings yet
- Rayleigh Line Flows AnalysisDocument14 pagesRayleigh Line Flows AnalysisKantharaj ChinnappaNo ratings yet
- 07 Fatigue Failure IDocument33 pages07 Fatigue Failure Iforemar100% (1)
- A Detailed Lesson Plan in Science and HeDocument4 pagesA Detailed Lesson Plan in Science and HeRichelle Millano BrownNo ratings yet
- Vidicon Camera Is A Term Which Commonly Used For All Types of Television CamerasDocument2 pagesVidicon Camera Is A Term Which Commonly Used For All Types of Television CamerasgsivakvpNo ratings yet
- Control Valves For Critical Applications PDFDocument8 pagesControl Valves For Critical Applications PDFonizuka-t2263No ratings yet
- Physical Chemistry I (Gases) : Maxwell and Boltzmann (1859) Developed A MathematicalDocument51 pagesPhysical Chemistry I (Gases) : Maxwell and Boltzmann (1859) Developed A MathematicalDina GaranNo ratings yet
- 20ft T75 Spec 18barDocument6 pages20ft T75 Spec 18barlucholadeNo ratings yet
- Kehinde Taiwo Obafemi Awolowo University NigeriaDocument49 pagesKehinde Taiwo Obafemi Awolowo University NigeriaAnanthNo ratings yet
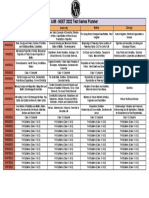
- AIM - NEET 2022 Test Series PlannerDocument1 pageAIM - NEET 2022 Test Series Planner6 months AgoNo ratings yet
- Physics ProjectDocument25 pagesPhysics Projectaryan sharrma100% (1)
- Aircraft and Jet Propulsion Systems: Ajith .J. Deshpande USN:1RC09ME006 SEM:VIII A' (Mech) College: SRSITDocument32 pagesAircraft and Jet Propulsion Systems: Ajith .J. Deshpande USN:1RC09ME006 SEM:VIII A' (Mech) College: SRSITAida Brkić - BurićNo ratings yet
- D 6815 - 02 - Rdy4mtutmdiDocument11 pagesD 6815 - 02 - Rdy4mtutmdiM Mirza Abdillah PratamaNo ratings yet
- Chemistry MCQs PPSCDocument92 pagesChemistry MCQs PPSCMuhammad Zain Kaleem100% (1)
- Type 101 Sealing Glass: Standard Specification ForDocument3 pagesType 101 Sealing Glass: Standard Specification ForRob GridleyNo ratings yet
- Composition of Soil Terminology & DefinitionsDocument18 pagesComposition of Soil Terminology & Definitionsedouard dudeNo ratings yet
- Comprehensive Exam InformationDocument8 pagesComprehensive Exam InformationMultiNo ratings yet
- F 85144Document2 pagesF 85144Nestor GalianoNo ratings yet
- Fluid Properties and Unit Conversions ProgramDocument13 pagesFluid Properties and Unit Conversions ProgramNawaz KhanNo ratings yet
- Uniform Circular Motion: PSI AP Physics 1Document6 pagesUniform Circular Motion: PSI AP Physics 1Boldie LutwigNo ratings yet
- CIVL3133 Ground Improvement:: What Are The Expected Outcomes of This Lecture?Document35 pagesCIVL3133 Ground Improvement:: What Are The Expected Outcomes of This Lecture?Louis BrightonNo ratings yet
- Vacuum Drying of Gas Pipelines - Rotary Vane Vacuum Pumps and Air CompressorsDocument1 pageVacuum Drying of Gas Pipelines - Rotary Vane Vacuum Pumps and Air CompressorsSoner SalarNo ratings yet
- Air Valves For Offshore and Seawater ApplicationsDocument4 pagesAir Valves For Offshore and Seawater ApplicationsSergio MuñozNo ratings yet
- Pile Foundation PresentationDocument110 pagesPile Foundation Presentationmujeebtalib100% (4)
- ANSYS Theory Reference For The Mechanical APDL and Mechanical Applications R13 PDFDocument0 pagesANSYS Theory Reference For The Mechanical APDL and Mechanical Applications R13 PDFfrancisco_gil_510% (1)
- Principles of Fluid DynamicsDocument2 pagesPrinciples of Fluid DynamicsMicheleFontanaNo ratings yet