You might also like
- Quantum Field Theory Notes by JaffeDocument17 pagesQuantum Field Theory Notes by JaffedbranetensionNo ratings yet
- Barnsley - Fractal InterpolationDocument27 pagesBarnsley - Fractal InterpolationBerta BertaNo ratings yet
- General Relativistic Quantum MechanicsDocument5 pagesGeneral Relativistic Quantum MechanicsFarhad HossainNo ratings yet
- Orbital Angular Momentum and Spherical HarmonicsDocument13 pagesOrbital Angular Momentum and Spherical HarmonicsUltrazordNo ratings yet
- QM PostulatesDocument11 pagesQM PostulatesMobashar AhmadNo ratings yet
- Calculus IIIvectorcalculus 2011Document82 pagesCalculus IIIvectorcalculus 2011Alfi LouisNo ratings yet
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 pagesLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielNo ratings yet
- Postulates of QM - 3Document11 pagesPostulates of QM - 3Vijay PradhanNo ratings yet
- Effective Numerical Treatment of Boundary Integral Equations. J.C Lachat and WatsonDocument15 pagesEffective Numerical Treatment of Boundary Integral Equations. J.C Lachat and Watsonrahim.sihadjmohandNo ratings yet
- Lectures 1 and 2Document5 pagesLectures 1 and 2Mario CacasennoNo ratings yet
- Retarded Green's Functions in Perturbed SpacetimesDocument23 pagesRetarded Green's Functions in Perturbed SpacetimesYuri Müller PlummNo ratings yet
- Conservative PDFDocument18 pagesConservative PDFAbha SrivastavaNo ratings yet
- 582 Chapter1 PDFDocument8 pages582 Chapter1 PDFliliNo ratings yet
- Factorization AlgebrasDocument12 pagesFactorization AlgebrasJason PayneNo ratings yet
- Non-Abelian Gauge Theories NotesDocument10 pagesNon-Abelian Gauge Theories NotesdheerajkmishraNo ratings yet
- Subject Chemistry: 22: Postulates of Quantum MechanicsDocument8 pagesSubject Chemistry: 22: Postulates of Quantum MechanicsHemanginee DasNo ratings yet
- Wave FunctionDocument13 pagesWave FunctionAjay SinghNo ratings yet
- Gauge TheoryDocument7 pagesGauge TheoryEli GerberNo ratings yet
- Lagrangian Quantum Field Theory 2.1 General Formalism: A (X) or The Index CanDocument26 pagesLagrangian Quantum Field Theory 2.1 General Formalism: A (X) or The Index CanJisoo Eric LeeNo ratings yet
- Exercises For Advanced Quantum Mechanics: Hand in On 22nd of NovemberDocument2 pagesExercises For Advanced Quantum Mechanics: Hand in On 22nd of NovemberAnonymous hHY139KGenNo ratings yet
- Chamseddine, Connes, The Uncanny Precision of The Spectral ActionDocument33 pagesChamseddine, Connes, The Uncanny Precision of The Spectral ActionJason PayneNo ratings yet
- Semiclassical Approximation: 3.1 The Classical LimitDocument22 pagesSemiclassical Approximation: 3.1 The Classical LimitRohan MittalNo ratings yet
- Dangla1988 APlaneStrainSoilStructureInteractionModelDocument14 pagesDangla1988 APlaneStrainSoilStructureInteractionModelpatrick danglaNo ratings yet
- Vector Calculus Concepts ExplainedDocument2 pagesVector Calculus Concepts ExplainedMratunjay PandeyNo ratings yet
- Coherent States in QuantumDocument50 pagesCoherent States in QuantumHua Hsuan ChenNo ratings yet
- David Berenstein, Juan Maldacena and Horatiu Nastase - Strings in Flat Space and PP Waves From N 4 Super Yang MillsDocument35 pagesDavid Berenstein, Juan Maldacena and Horatiu Nastase - Strings in Flat Space and PP Waves From N 4 Super Yang MillsJuazmantNo ratings yet
- General Principles of Brane Kinematics and DynamicsDocument12 pagesGeneral Principles of Brane Kinematics and DynamicsOliver BardinNo ratings yet
- Ultralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanDocument36 pagesUltralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanAritra BanerjeeNo ratings yet
- Vector Calculus Concepts ExplainedDocument2 pagesVector Calculus Concepts ExplainedMratunjay PandeyNo ratings yet
- The Calculus of VariationsDocument52 pagesThe Calculus of VariationsKim HsiehNo ratings yet
- The Rigged Hilbert Space Formulation of Quantum Mechanics AnDocument18 pagesThe Rigged Hilbert Space Formulation of Quantum Mechanics AnCristin LeeNo ratings yet
- Square Root of OperatorDocument8 pagesSquare Root of OperatorHuy VõNo ratings yet
- PARTICLE KINEMATICSDocument8 pagesPARTICLE KINEMATICSAlexandros KouretsisNo ratings yet
- Chapter One: Fundamental Concept of TensorsDocument47 pagesChapter One: Fundamental Concept of Tensorsmoon_moz8069No ratings yet
- Continuous Symmetries In: Field TheoryDocument33 pagesContinuous Symmetries In: Field Theoryrebe53No ratings yet
- Mathematics of The Classical and The QuantumDocument21 pagesMathematics of The Classical and The Quantumabbas bari100% (1)
- A Generalized FRW Model of SpaceDocument7 pagesA Generalized FRW Model of Spacemegha gargNo ratings yet
- Banach Space-JSBDocument20 pagesBanach Space-JSBdasari manikantaNo ratings yet
- A Fresh Look at The Bohr - Rosenfeld Analysis and A Proof of A Conjecture of HeisenbergDocument7 pagesA Fresh Look at The Bohr - Rosenfeld Analysis and A Proof of A Conjecture of HeisenbergahsbonNo ratings yet
- Mathematical Prerequisites: QUANTUM MECHANICS - A Modern Development © World Scientific Publishing Co. Pte. LTDDocument5 pagesMathematical Prerequisites: QUANTUM MECHANICS - A Modern Development © World Scientific Publishing Co. Pte. LTDdomeleuNo ratings yet
- Quantum Mechanics of Point Particle MotionDocument30 pagesQuantum Mechanics of Point Particle Motion김양환No ratings yet
- Quantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRDocument4 pagesQuantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRAvinash RejiNo ratings yet
- Position and Momentum SpaceDocument2 pagesPosition and Momentum Spacealokesh1982No ratings yet
- Uncertainty Principle Mathematical SurveyDocument32 pagesUncertainty Principle Mathematical SurveyWilson Jaime De CarvalhoNo ratings yet
- Fundamental Equations of Mie TheoryDocument25 pagesFundamental Equations of Mie TheoryErikNo ratings yet
- Pacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IDocument21 pagesPacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IKate Sai kishoreNo ratings yet
- BF01316547Document4 pagesBF01316547Nikos PapanikolaouNo ratings yet
- Multivector Functions PDFDocument6 pagesMultivector Functions PDFAlireza TakrimiNo ratings yet
- Space and TimeDocument60 pagesSpace and Timeunima3610No ratings yet
- Computing The Double-Body - Terms Using A B-Spline Based Panel MethodDocument5 pagesComputing The Double-Body - Terms Using A B-Spline Based Panel MethodpbandykNo ratings yet
- Semi Classical Analysis StartDocument488 pagesSemi Classical Analysis StartkankirajeshNo ratings yet
- Function SpacesDocument10 pagesFunction SpacesAthan CalugayNo ratings yet
- Roy Soc DyneshelbyDocument28 pagesRoy Soc Dyneshelbyapi-3696319No ratings yet
- What Is Spin?: Independent Scientific Research Institute Box 30, CH-1211 Geneva-12, SwitzerlandDocument6 pagesWhat Is Spin?: Independent Scientific Research Institute Box 30, CH-1211 Geneva-12, SwitzerlandJohnNo ratings yet
- On The Vacuum State in Quantum Field Theory. II: H. J. BorchersDocument23 pagesOn The Vacuum State in Quantum Field Theory. II: H. J. BorchersAnonymous FigYuONxuuNo ratings yet
- YuDocument15 pagesYuUnit JEE and NEET InstituteNo ratings yet
- 978-3-319-57181-2_2Document35 pages978-3-319-57181-2_2sergenNo ratings yet
- Wave FunctionsxOperatorsDocument3 pagesWave FunctionsxOperatorsSisir BoseNo ratings yet
- Geometry of Quantum Evolution For Mixed Quantum States - Ole Andersson, Hoshang HeydariDocument6 pagesGeometry of Quantum Evolution For Mixed Quantum States - Ole Andersson, Hoshang HeydariCambiador de MundoNo ratings yet
- CFBC Boiler DescriptionDocument9 pagesCFBC Boiler Descriptioncmani_bweNo ratings yet
- Directview Classic CR Theory GuideDocument113 pagesDirectview Classic CR Theory GuideMarckus Brody100% (1)
- RMP ProfileDocument14 pagesRMP ProfileChellaPandian100% (1)
- Fluid Pump Maintenance ProcedureDocument8 pagesFluid Pump Maintenance ProcedureTrue StoryNo ratings yet
- Technical Data for Jotun BlockfillerDocument3 pagesTechnical Data for Jotun BlockfillerrajeshNo ratings yet
- Literature Review Concrete BlockDocument8 pagesLiterature Review Concrete Blockc5r0xg9z100% (1)
- Ieee Computer SDN Issue When Open Source Meets Network Control PlanesDocument9 pagesIeee Computer SDN Issue When Open Source Meets Network Control PlanesMysterio KnowerNo ratings yet
- en Actionair Installation Method Smokeshield Kit Web VersionDocument7 pagesen Actionair Installation Method Smokeshield Kit Web VersioniishdpsNo ratings yet
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Document7 pagesSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoNo ratings yet
- 6 Insulating Sticks 2017 Esp CatalogueDocument42 pages6 Insulating Sticks 2017 Esp CatalogueAnzar ShaikhNo ratings yet
- Tilt-Up Construction GuideDocument147 pagesTilt-Up Construction GuideTiago Castelani100% (1)
- Inversor Min Growatt 8000 TL XDocument2 pagesInversor Min Growatt 8000 TL XIngenieria 2No ratings yet
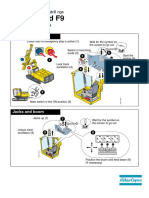
- Start The Engine For ROC F6 and F9Document2 pagesStart The Engine For ROC F6 and F9aaronNo ratings yet
- Model 3410: Shear Beam Load CellsDocument4 pagesModel 3410: Shear Beam Load CellsIvanMilovanovicNo ratings yet
- Motivation Letter SampleDocument2 pagesMotivation Letter Samplepjuvvadi0% (1)
- Autosar Sws Spi HandlerdriverDocument76 pagesAutosar Sws Spi Handlerdriverkrnl386No ratings yet
- Ge Stator Earth FaultDocument7 pagesGe Stator Earth FaultMarioNo ratings yet
- Soln p3 21Document5 pagesSoln p3 21Vinicius RamosNo ratings yet
- Simulation Engineer - Drives SystemsDocument2 pagesSimulation Engineer - Drives Systemsdipraj kadlagNo ratings yet
- Unit HydrographDocument31 pagesUnit Hydrographg7711637No ratings yet
- Replace fan kit for hp Model 211A Square Wave GeneratorDocument1 pageReplace fan kit for hp Model 211A Square Wave GeneratorxibmNo ratings yet
- CC 9045 Manual enDocument20 pagesCC 9045 Manual enKijo SupicNo ratings yet
- BIEGDocument9 pagesBIEGBertrandNo ratings yet
- VANET SimulationDocument43 pagesVANET Simulationcthomas1990No ratings yet
- TutoDocument432 pagesTutotsf2012No ratings yet
- Bituseal Liquid: Heavy Duty Bituminous CoatingDocument2 pagesBituseal Liquid: Heavy Duty Bituminous Coatingengramir07No ratings yet
- LED Driver Test Report IEC 61347 2 13 36CDocument11 pagesLED Driver Test Report IEC 61347 2 13 36CLingaraj Suresh LingaianNo ratings yet
- T Box 12-280Document4 pagesT Box 12-280Bibi DanilaNo ratings yet
- Name: Mikhaela Genevieve G. Eduarte Age: 17 Year: 1 Year Program: Communication ArtsDocument10 pagesName: Mikhaela Genevieve G. Eduarte Age: 17 Year: 1 Year Program: Communication ArtsDana UyNo ratings yet
- FP Diesel New Numbers Announcement Aug 17Document3 pagesFP Diesel New Numbers Announcement Aug 17Hebert MedinaNo ratings yet