You might also like
- Name: Bierneza, Alexander Ray CDocument6 pagesName: Bierneza, Alexander Ray CAlexander Ray Bierneza50% (2)
- Electrical System For High Rise BuildingDocument47 pagesElectrical System For High Rise BuildingMohammad Belal Hossain87% (30)
- EEE8155 Design and Analysis of Electrical Machines and DrivesDocument13 pagesEEE8155 Design and Analysis of Electrical Machines and DrivesstephenNo ratings yet
- Tutorial 6 DC MotorDocument1 pageTutorial 6 DC MotorparvathyNo ratings yet
- Microprocessor Project 1Document8 pagesMicroprocessor Project 1himanshuNo ratings yet
- Models 510 / 520: Pressure TransmitterDocument3 pagesModels 510 / 520: Pressure TransmittersanachNo ratings yet
- EM II ProblemsDocument4 pagesEM II ProblemsTony StarkNo ratings yet
- Electronic Devices and Amplifiers RevDocument12 pagesElectronic Devices and Amplifiers RevHash FalahiNo ratings yet
- Student Design Projects in A Programmable Logic Controller PLC CourseDocument10 pagesStudent Design Projects in A Programmable Logic Controller PLC CourseMarees KannanNo ratings yet
- Color User Manual (En)Document434 pagesColor User Manual (En)Trojan_69No ratings yet
- TVS-F-002 LIR LS Form Boeing 737-700Document1 pageTVS-F-002 LIR LS Form Boeing 737-700Georgios KumarcisNo ratings yet
- Characteristics of DC GeneratorsDocument9 pagesCharacteristics of DC GeneratorsvenkatNo ratings yet
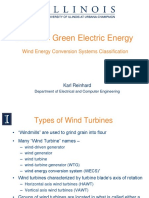
- Wind Energy Systems ClassificationsDocument16 pagesWind Energy Systems ClassificationsSubheesh KTNo ratings yet
- Unijunction TransistorDocument54 pagesUnijunction TransistorPaoNo ratings yet
- DC Motor Calculations 2004 PDFDocument27 pagesDC Motor Calculations 2004 PDFAlbert Cereno SerranoNo ratings yet
- Introduction To PythonDocument24 pagesIntroduction To PythonYusuf WasiuNo ratings yet
- Digital Signal Processing Multiple Choice Questions and Answers - SanfoundryDocument13 pagesDigital Signal Processing Multiple Choice Questions and Answers - SanfoundryOMSURYACHANDRAN0% (1)
- ECA Lab ManualDocument63 pagesECA Lab ManualsivadanamsNo ratings yet
- Condition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultDocument6 pagesCondition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultdimasairlanggaNo ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Characteristics of DC Shunt Compound Motor PDFDocument2 pagesCharacteristics of DC Shunt Compound Motor PDFvenkat.snrajuNo ratings yet
- PLC AutomationDocument18 pagesPLC AutomationRavi JoshiNo ratings yet
- Direct On Line DOL Motor Starter PDFDocument7 pagesDirect On Line DOL Motor Starter PDFVasudev AgrawalNo ratings yet
- EEE267 DCMotor Math ProblemsDocument5 pagesEEE267 DCMotor Math ProblemsmaakbdNo ratings yet
- Moment Inertia IntegrationDocument34 pagesMoment Inertia IntegrationTsuki Zombina100% (1)
- Power Analysis of PWM Motor Drives PDFDocument22 pagesPower Analysis of PWM Motor Drives PDFJaime Vanegas IriarteNo ratings yet
- Electrical Machines: DC Generator and MotorDocument114 pagesElectrical Machines: DC Generator and MotorJanardan ShivashankarNo ratings yet
- Pitch Factor and Distribution FactorDocument1 pagePitch Factor and Distribution FactornellaiNo ratings yet
- Example 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and ADocument3 pagesExample 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and Ahakkı_aNo ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- A Cumulative Compound Motor Has A Definite No Load Speed and So It Does NotDocument10 pagesA Cumulative Compound Motor Has A Definite No Load Speed and So It Does NotS.m. FerdousNo ratings yet
- Introduction To Kinematics and MechanismsDocument25 pagesIntroduction To Kinematics and MechanismsAli Khan Niazi100% (1)
- Wind Energy System MPPTDocument19 pagesWind Energy System MPPTSatyendra VishwakarmaNo ratings yet
- DC Motor Lecture 3Document27 pagesDC Motor Lecture 3Fira tubeNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Electric Drives ControlDocument29 pagesElectric Drives ControlNebyou DanielNo ratings yet
- Altivar® 28 Adjustable Speed Drive Controllers User GuideDocument88 pagesAltivar® 28 Adjustable Speed Drive Controllers User GuideplsalmrajNo ratings yet
- Formulas and Conversion Factors: Section OutlineDocument8 pagesFormulas and Conversion Factors: Section OutlineHarsh Shah100% (1)
- MOTORING AND GENERATING MODE OF 3-Φ INDUCTION MACHINE - A COMPARATIVE EVALUATION FOR ENERGY EFFICIENCY PDFDocument64 pagesMOTORING AND GENERATING MODE OF 3-Φ INDUCTION MACHINE - A COMPARATIVE EVALUATION FOR ENERGY EFFICIENCY PDFIjabi0% (1)
- Electrical Machine Design Unit1-VKDocument8 pagesElectrical Machine Design Unit1-VKSajidh M ShamsudeenNo ratings yet
- Festo Basic PLCDocument179 pagesFesto Basic PLCemylangamNo ratings yet
- Microsoft PowerPoint - Eet - DC MachinesDocument8 pagesMicrosoft PowerPoint - Eet - DC MachinesBoy DolandNo ratings yet
- 9A02308 Electrical Machines - IDocument4 pages9A02308 Electrical Machines - IsivabharathamurthyNo ratings yet
- 16.04.2019 Fire Traingle and Its Importance.Document1 page16.04.2019 Fire Traingle and Its Importance.Vaibhav Vithoba Naik100% (1)
- Microsoft Word - STATOR PROTECTION. Final ReportDocument11 pagesMicrosoft Word - STATOR PROTECTION. Final ReportHari Krishna.MNo ratings yet
- Electromechanical Energy Conversion II: Dr. Ali M. EltamalyDocument43 pagesElectromechanical Energy Conversion II: Dr. Ali M. EltamalyYacine BendjeddouNo ratings yet
- AC Motor: Electric Motor Alternating Current Stator RotorDocument17 pagesAC Motor: Electric Motor Alternating Current Stator RotorAnonymous Clyy9NNo ratings yet
- DC Machine PDFDocument40 pagesDC Machine PDFSritaran BalakrishnanNo ratings yet
- Micro HydroDocument35 pagesMicro HydroArun RajendranNo ratings yet
- Armature Winding in DC MachinesDocument49 pagesArmature Winding in DC MachinesDellpro DellproNo ratings yet
- To Be Familiar With An Oscilloscope and AC Waves As Well As Measuring Maximum Value, RMS Value, Time Period and Frequency by Oscilloscope.Document4 pagesTo Be Familiar With An Oscilloscope and AC Waves As Well As Measuring Maximum Value, RMS Value, Time Period and Frequency by Oscilloscope.Hassan MahirNo ratings yet
- Unified Theory of Machine Paper PDFDocument1 pageUnified Theory of Machine Paper PDFOladeji Ifedayo RNo ratings yet
- Applying PMDC Motors: Product FocusDocument4 pagesApplying PMDC Motors: Product FocusAniesh MahajanNo ratings yet
- 1&2.electrical Systems & Motors PDFDocument75 pages1&2.electrical Systems & Motors PDFvikubhardwaj9224No ratings yet
- Chapter 4Document24 pagesChapter 4javeria zafeerNo ratings yet
- DC Motor Part IIIDocument26 pagesDC Motor Part IIIMohd YasirNo ratings yet
- ELEN 30083 Electrical Machines 1: Prepared byDocument47 pagesELEN 30083 Electrical Machines 1: Prepared byJheromeNo ratings yet
- ASSIGNMENT Elektric q1-q3Document16 pagesASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinNo ratings yet
- Synchronous Generator I PDFDocument38 pagesSynchronous Generator I PDFjcrodriguez8367% (3)
- An Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorDocument34 pagesAn Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorP.s. PeriasamyNo ratings yet
- Dell CyberjayaDocument1 pageDell CyberjayaKelvin LiewNo ratings yet
- IstacDocument1 pageIstacKelvin LiewNo ratings yet
- Telemong K.t'ganuDocument1 pageTelemong K.t'ganuKelvin LiewNo ratings yet
- Malaysia: Year 2007Document1 pageMalaysia: Year 2007Kelvin LiewNo ratings yet
- Nestle PJDocument1 pageNestle PJKelvin LiewNo ratings yet
- GoldhillDocument1 pageGoldhillKelvin LiewNo ratings yet
- Plaza SentralDocument1 pagePlaza SentralKelvin LiewNo ratings yet
- Northport-B 11Document1 pageNorthport-B 11Kelvin LiewNo ratings yet
- Langkawi Starcruise JettyDocument1 pageLangkawi Starcruise JettyKelvin LiewNo ratings yet
- Malaysia: Year 2006Document1 pageMalaysia: Year 2006Kelvin LiewNo ratings yet
- Kemaman TestingDocument1 pageKemaman TestingKelvin LiewNo ratings yet
- GurneyDocument1 pageGurneyKelvin LiewNo ratings yet
- Labuan SFFM SiloDocument1 pageLabuan SFFM SiloKelvin LiewNo ratings yet
- Crowne PlazaDocument1 pageCrowne PlazaKelvin LiewNo ratings yet
- Caltex TestingDocument1 pageCaltex TestingKelvin LiewNo ratings yet
- Wisma PutraDocument1 pageWisma PutraKelvin LiewNo ratings yet
- Kelana Jaya MosqueDocument1 pageKelana Jaya MosqueKelvin LiewNo ratings yet
- Star HillDocument1 pageStar HillKelvin LiewNo ratings yet
- Ipoh MosqueDocument1 pageIpoh MosqueKelvin LiewNo ratings yet
- DigiDocument1 pageDigiKelvin LiewNo ratings yet
- KLCCDocument1 pageKLCCKelvin LiewNo ratings yet
- KLCC HotelDocument1 pageKLCC HotelKelvin LiewNo ratings yet
- Kollmorgen KBM Series Brushless Motors Selection GuideDocument104 pagesKollmorgen KBM Series Brushless Motors Selection GuideMika MikicNo ratings yet
- Digital Pressure Controls: General DescriptionDocument1 pageDigital Pressure Controls: General DescriptionyuyunNo ratings yet
- TL2201 2065763Document4 pagesTL2201 2065763rakibul hasanNo ratings yet
- Electruc FieldDocument21 pagesElectruc Fieldjp marceloNo ratings yet
- Energies 16 01698 v2Document18 pagesEnergies 16 01698 v2lorena tiqueNo ratings yet
- Service: Led TVDocument101 pagesService: Led TVPaul BradeaNo ratings yet
- Adiabatic LogicDocument68 pagesAdiabatic Logicahcheb100% (1)
- Experiment No 9 Load CellDocument4 pagesExperiment No 9 Load CellSagarNo ratings yet
- SPH 280 - Cell Data Sheet: ClassificationDocument2 pagesSPH 280 - Cell Data Sheet: ClassificationWilson PavãoNo ratings yet
- Holiday Home Work-Occp-Pcm-2023Document30 pagesHoliday Home Work-Occp-Pcm-2023ArnavNo ratings yet
- Power ManagementDocument45 pagesPower ManagementWee Chuan PoonNo ratings yet
- Lab No 2Document11 pagesLab No 2AdilSaeedNo ratings yet
- Glossary of Terms Related To T Audiovisual Materials - Copia 1Document1 pageGlossary of Terms Related To T Audiovisual Materials - Copia 1aitor camieraNo ratings yet
- Department of Electrical Engineering, IOE Tutorial #1: Electric Circuit Theory Bel/Bex/Bct Ii/IDocument2 pagesDepartment of Electrical Engineering, IOE Tutorial #1: Electric Circuit Theory Bel/Bex/Bct Ii/IJcb NitinNo ratings yet
- Chapter 2 - Diode Circuit Analysis and Applications-1Document24 pagesChapter 2 - Diode Circuit Analysis and Applications-1CraigNo ratings yet
- Leeson Full Product CatalogDocument500 pagesLeeson Full Product Catalogkontejner14100% (1)
- Isc 2SC4370: Silicon NPN Power TransistorDocument2 pagesIsc 2SC4370: Silicon NPN Power TransistorsavidhamNo ratings yet
- Chiral Ligand-Induced Structural Transformation of LowDimensional Hybrid Perovskite For Circularly PolarizedDocument8 pagesChiral Ligand-Induced Structural Transformation of LowDimensional Hybrid Perovskite For Circularly PolarizedJay LeeNo ratings yet
- Din 72552Document3 pagesDin 72552Dr. CNo ratings yet
- ZXDU68 S601 (V4.0) Product DescriptionDocument22 pagesZXDU68 S601 (V4.0) Product DescriptionRonaldNo ratings yet
- TSRSDocument93 pagesTSRSAli AkbarNo ratings yet
- Jayson Ruales Final Output p1Document1 pageJayson Ruales Final Output p1Arnel Pamaos Lopiba MontañezNo ratings yet
- Chem843 6Document16 pagesChem843 6soenen.bramNo ratings yet
- OLED Module 1.12 Inch-White-27 - 38.9 - 1.28mm - DatasheetDocument22 pagesOLED Module 1.12 Inch-White-27 - 38.9 - 1.28mm - DatasheetmaximoNo ratings yet
- 793f2 PDFDocument8 pages793f2 PDFDennis Olaya100% (1)
- 276XAXH-5D: Product Data SheetDocument5 pages276XAXH-5D: Product Data SheetCarlos VidarNo ratings yet
- 80010360Document2 pages80010360mdisicNo ratings yet
- Installation and Operation Manual: Load Sharing ModuleDocument32 pagesInstallation and Operation Manual: Load Sharing ModuleHammim HamzhahhNo ratings yet