You might also like
- Detailed Lesson Plan For Introducing Linear FunctionDocument5 pagesDetailed Lesson Plan For Introducing Linear FunctionGloria Gonzales100% (3)
- Linear Battery Charger Brochure 2016Document48 pagesLinear Battery Charger Brochure 2016CaniNo ratings yet
- Automotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationDocument55 pagesAutomotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationUchenna Adimmadu100% (1)
- Smart Battery Management System For Electric VehiclesDocument135 pagesSmart Battery Management System For Electric VehiclesAnonymous tzIXaHx150% (2)
- Battery ManagementDocument8 pagesBattery Managementmelfer100% (2)
- Battery Management SystemDocument4 pagesBattery Management Systemkoushik94No ratings yet
- Penelope Bise Battery Management System An IntroductionDocument25 pagesPenelope Bise Battery Management System An Introduction20446No ratings yet
- Clean Snowmobile Chassis PosterDocument1 pageClean Snowmobile Chassis Posterapi-284995772No ratings yet
- Battery Management System in Electric VehiclesDocument3 pagesBattery Management System in Electric VehiclesA ZNo ratings yet
- Battery Managment System Report Final 14-04 - 35Document31 pagesBattery Managment System Report Final 14-04 - 35AbdullahNo ratings yet
- Research Repot On A123 Battery ModelingDocument30 pagesResearch Repot On A123 Battery ModelingM VetriselviNo ratings yet
- Battery Management SystemsDocument18 pagesBattery Management SystemsmkNo ratings yet
- Comprehensive Review and Comparison of DC Fast Charging Converter TopologiesDocument6 pagesComprehensive Review and Comparison of DC Fast Charging Converter TopologiesDon ReloNo ratings yet
- Basic - BATTERY PACK HOUSINGDocument9 pagesBasic - BATTERY PACK HOUSINGAkshay bypNo ratings yet
- Advanced Battery Management System: Pragati Engineering CollegeDocument25 pagesAdvanced Battery Management System: Pragati Engineering CollegeLakshmi TanmaiNo ratings yet
- Project Report Group C1Document22 pagesProject Report Group C1Dinesh PanickerNo ratings yet
- Global Battery Management Systems MarketDocument19 pagesGlobal Battery Management Systems MarketSanjay MatthewsNo ratings yet
- A Review On Battery Management System For Electric VehiclesDocument14 pagesA Review On Battery Management System For Electric VehiclesIJRASETPublicationsNo ratings yet
- Design and Model Making of Electric Vehicle Charging StationDocument5 pagesDesign and Model Making of Electric Vehicle Charging StationIJRASETPublicationsNo ratings yet
- Electric Vehicle Modelling and SimulationDocument25 pagesElectric Vehicle Modelling and SimulationLakshmanan subas chandra bose100% (1)
- Electric Car: GE109 Lab ReportDocument15 pagesElectric Car: GE109 Lab ReportSujal BansalNo ratings yet
- E RaajaDocument18 pagesE RaajasksinghkgnNo ratings yet
- Design of Two Wheeled Electrica VehicleDocument76 pagesDesign of Two Wheeled Electrica VehicletoceanduongNo ratings yet
- Control of Hybrid Electric Vehicles With Diesel EnginesDocument136 pagesControl of Hybrid Electric Vehicles With Diesel Enginesapi-3709675No ratings yet
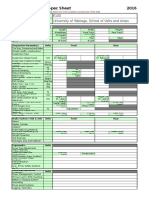
- 2016 Design EV Spec Sheet - Template - 2016!03!22Document3 pages2016 Design EV Spec Sheet - Template - 2016!03!22Bruno Couto100% (1)
- Wired and Wireless Charging of EVDocument7 pagesWired and Wireless Charging of EVShubham RajNo ratings yet
- Designing & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingDocument10 pagesDesigning & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingIJRASETPublicationsNo ratings yet
- Calculation of Charge and Health Status Condition in Battery Electric VehicleDocument3 pagesCalculation of Charge and Health Status Condition in Battery Electric VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wireless Charging Electric VehicleDocument18 pagesWireless Charging Electric VehicleRohan MitraNo ratings yet
- Final Training Report Electric VehicleDocument32 pagesFinal Training Report Electric Vehicleadarsh kashyapNo ratings yet
- Overview of Electric Vehicles EVs and EV SensorsDocument17 pagesOverview of Electric Vehicles EVs and EV Sensorsuttam pundirNo ratings yet
- Fundamentals of EVDocument39 pagesFundamentals of EVAtheli Vijay ChandraNo ratings yet
- Li-Ion CellDocument17 pagesLi-Ion CellDavid CondoviciNo ratings yet
- Battery Management Systems For Electric VehiclesDocument23 pagesBattery Management Systems For Electric VehiclesMohammad Tufail Safdar100% (5)
- Electric Vehicles and Mobility ReportDocument21 pagesElectric Vehicles and Mobility ReportDevendra Patil100% (1)
- Project Doc CARDocument71 pagesProject Doc CARSyed AwaisNo ratings yet
- Vehicle To GridDocument7 pagesVehicle To GridSurajRGuptaNo ratings yet
- Paper Battery ReportDocument17 pagesPaper Battery ReportIshuNo ratings yet
- Bi-Directional Battery Management SystemDocument28 pagesBi-Directional Battery Management SystemAjit NarwalNo ratings yet
- Mayank FinalprojectDocument74 pagesMayank FinalprojectPathikrit GuhaNo ratings yet
- Cell Product Specification: Microvast Power Systems Co.,LtdDocument3 pagesCell Product Specification: Microvast Power Systems Co.,LtdAngelo DenidisNo ratings yet
- Smart Meter PaperDocument7 pagesSmart Meter PaperAmin AzadNo ratings yet
- Regenerative Braking System: Mee396: Automotive Mini ProjectDocument14 pagesRegenerative Braking System: Mee396: Automotive Mini ProjectAngad BangaNo ratings yet
- BLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterDocument6 pagesBLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterRahul UdayanNo ratings yet
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeDocument19 pagesA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenNo ratings yet
- Design of Electric Vehicle Battery Management - SystDocument7 pagesDesign of Electric Vehicle Battery Management - SystThái SơnNo ratings yet
- Modeling and Simulation of EV HEV PDFDocument17 pagesModeling and Simulation of EV HEV PDFshawn liNo ratings yet
- Bms With SocDocument15 pagesBms With SocPoojaNo ratings yet
- Hybrid Electric VehiclesDocument28 pagesHybrid Electric VehiclesPreet NagpalNo ratings yet
- Electricvehiclerunbybldcmotor PDFDocument57 pagesElectricvehiclerunbybldcmotor PDFSanthoshNo ratings yet
- 11 - 27 Battery-Management System (BMS) and SOCDocument13 pages11 - 27 Battery-Management System (BMS) and SOCNatarajan Nagarajan100% (1)
- Electric Vehicle Charging Station Web Application: Submitted byDocument28 pagesElectric Vehicle Charging Station Web Application: Submitted by20TUIT018 DHANA PRIYA R.No ratings yet
- Design and Fabrication of Hydraulic Spring StiffnessDocument38 pagesDesign and Fabrication of Hydraulic Spring StiffnessRaja ManeNo ratings yet
- Paper Battery Full Seminar Report On WWW Way2project inDocument12 pagesPaper Battery Full Seminar Report On WWW Way2project inPhebe PeterNo ratings yet
- Dual Axis Tracker For Parabolic Solar ConcentratorsDocument24 pagesDual Axis Tracker For Parabolic Solar ConcentratorsHasnain MuhammadNo ratings yet
- Solar Panel Tracking and Monitoring SystemDocument8 pagesSolar Panel Tracking and Monitoring SystemGRD JournalsNo ratings yet
- Can AnalyzerDocument39 pagesCan Analyzerallaboutanalog100% (1)
- Greenfield Smart City Framework Complete Self-Assessment GuideFrom EverandGreenfield Smart City Framework Complete Self-Assessment GuideNo ratings yet
- CHAPTER 2 PRECIPATION Class 5 NovDocument46 pagesCHAPTER 2 PRECIPATION Class 5 NovMohamad IrfanNo ratings yet
- Series Piping Final 2Document52 pagesSeries Piping Final 2SHOBHIT KUMARNo ratings yet
- GearsDocument57 pagesGearsعبدالاله العسيريNo ratings yet
- Semiconductors DiscretesDocument96 pagesSemiconductors Discretespacho2117100% (4)
- sch-45852 CDocument13 pagessch-45852 CCatalin NeacsuNo ratings yet
- Automatic Voltage RegulatorDocument27 pagesAutomatic Voltage RegulatorHarpreet SharmaNo ratings yet
- Byd Forklift 1 72gb PDF Service and Part ManualDocument23 pagesByd Forklift 1 72gb PDF Service and Part Manualjoshualyons131198xtj100% (142)
- Interview QuestionsDocument3 pagesInterview QuestionsSai KiranNo ratings yet
- Identification of Phases of Various Oil, Surfactant/ Co-Surfactants and Water System by Ternary Phase DiagramDocument9 pagesIdentification of Phases of Various Oil, Surfactant/ Co-Surfactants and Water System by Ternary Phase DiagramBushra ShaukatNo ratings yet
- 4cs BrochureDocument2 pages4cs Brochurepink_key711No ratings yet
- 3 93A E PCS1 Pressure TransmitterDocument3 pages3 93A E PCS1 Pressure TransmitterlesonspkNo ratings yet
- Paul Zeitz-Art and Craft of Problem Solving-Instructors ManualDocument82 pagesPaul Zeitz-Art and Craft of Problem Solving-Instructors ManualCarlos Xu100% (2)
- Instruction Manual Fisher Fieldvue dvc6200 Sis Digital Valve Controller en 122736Document124 pagesInstruction Manual Fisher Fieldvue dvc6200 Sis Digital Valve Controller en 122736Gangsar DwikaNo ratings yet
- Gtsio-520 Series IpcDocument92 pagesGtsio-520 Series IpcPedro Paternina100% (1)
- Practical 3 Porosity Determination Gas ExpansionDocument14 pagesPractical 3 Porosity Determination Gas ExpansionGolley BeckyNo ratings yet
- Api 570Document63 pagesApi 570Ramzi BEN AHMED100% (1)
- Fluids - IIIDocument9 pagesFluids - IIIPOONAM RANINo ratings yet
- Marelli High Efficiency Motors CatalogueDocument6 pagesMarelli High Efficiency Motors CatalogueTeknik GresikNo ratings yet
- Jawad 05k6Document19 pagesJawad 05k6Tech GurusNo ratings yet
- Mixture - AlligationDocument7 pagesMixture - AlligationKaberi BhuyanNo ratings yet
- Chapter 26 Web Chapter: The ISLM Model: Economics of Money, Banking, and Fin. Markets, 10e (Mishkin)Document23 pagesChapter 26 Web Chapter: The ISLM Model: Economics of Money, Banking, and Fin. Markets, 10e (Mishkin)Ahmad Tawfiq DarabsehNo ratings yet
- MT Lab Manual - WordDocument99 pagesMT Lab Manual - WordAjin JayanNo ratings yet
- Logs and Exponents: CSE 373 Lecture 2: Mathematical BackgroundDocument5 pagesLogs and Exponents: CSE 373 Lecture 2: Mathematical BackgroundTawsifNo ratings yet
- Toaz - Info Unit 2 Assignment Brief PRDocument30 pagesToaz - Info Unit 2 Assignment Brief PRhai hoangNo ratings yet
- IB Chemistry Internal Assessment 2Document18 pagesIB Chemistry Internal Assessment 2beslisevvalNo ratings yet
- NPTEL List of Courses - Phase IDocument6 pagesNPTEL List of Courses - Phase IK Sudarshana ReddyNo ratings yet
- Esccessorios Climaver Perfiver IngDocument1 pageEsccessorios Climaver Perfiver IngjesusNo ratings yet
- Scada Lab: Supervisory Control and Data AcquisitionDocument102 pagesScada Lab: Supervisory Control and Data AcquisitionpfalencarNo ratings yet