You might also like
- Engine Ctsa Czga CZGB Repair Manual EngDocument285 pagesEngine Ctsa Czga CZGB Repair Manual Enggrigory.mstrskNo ratings yet
- SCNZ Steel Connect Design ProceduresDocument151 pagesSCNZ Steel Connect Design ProceduresEthan YangNo ratings yet
- Introduction To The Design of Portal Frame Bldgs - 4ed - bk180 PDFDocument13 pagesIntroduction To The Design of Portal Frame Bldgs - 4ed - bk180 PDFPRAVEENKUMAR HIREMATH0% (1)
- Case IH MAXXUM 110 EP 115 EP 120 EP 125 E Operator ManualDocument462 pagesCase IH MAXXUM 110 EP 115 EP 120 EP 125 E Operator ManualIonut Angheluta100% (3)
- Atsg 41te (A604) PDFDocument88 pagesAtsg 41te (A604) PDFJuan Miguel Ortiz100% (5)
- Macaulay's Method 0809Document87 pagesMacaulay's Method 0809freddielistoNo ratings yet
- Through Bolt Design EC2Document3 pagesThrough Bolt Design EC2Mungkorn Satt100% (1)
- Tables - Bending Moment and Reaction Tables For Continuous BeamsDocument3 pagesTables - Bending Moment and Reaction Tables For Continuous Beamsikirby77100% (1)
- ADEBAR (1993) - Bearing Strength of Compressive Struts Confined by Plain ConcreteDocument9 pagesADEBAR (1993) - Bearing Strength of Compressive Struts Confined by Plain ConcreteVítor Freitas100% (1)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Introduction To Cessna 152 Systems First EditionDocument52 pagesIntroduction To Cessna 152 Systems First Editionabdulla jalaal100% (4)
- RC Practice Set 2 2016 SolutionsDocument5 pagesRC Practice Set 2 2016 SolutionsSayed YusufNo ratings yet
- Space Structures - Principles and Practice - Subramanian Narayan - Volulmul 2Document72 pagesSpace Structures - Principles and Practice - Subramanian Narayan - Volulmul 2herohue75% (4)
- Effective Length Factor For The Design of X-Bracing Systems PDFDocument5 pagesEffective Length Factor For The Design of X-Bracing Systems PDFGonzalo AbarcaNo ratings yet
- Aisc JournalDocument90 pagesAisc JournalRene BermudezNo ratings yet
- Design of Diagonal Cross Bracings - Part 1 Theoretical Study PDFDocument5 pagesDesign of Diagonal Cross Bracings - Part 1 Theoretical Study PDFaapennsylvaniaNo ratings yet
- Contents of Semi-Rigid Connections HandbookDocument3 pagesContents of Semi-Rigid Connections HandbookCuong Nguyen100% (1)
- Joints in Steel Construction - Simple Connections - Part 04 PDFDocument72 pagesJoints in Steel Construction - Simple Connections - Part 04 PDFkakem61No ratings yet
- Wind - Open BuildingsDocument4 pagesWind - Open BuildingsAnticristo.uniNo ratings yet
- Discussion - Design of W-Shapes For Combined Bending and TorsionDocument2 pagesDiscussion - Design of W-Shapes For Combined Bending and TorsionnaimNo ratings yet
- 988H - Service Training TextDocument31 pages988H - Service Training TextÉdula Ostermann100% (2)
- Chapter18 Beam Subjected To Torsion & Bending IIDocument29 pagesChapter18 Beam Subjected To Torsion & Bending IIVincent TengNo ratings yet
- Design of Members Subject To Combined Bending and Torsion SCIDocument3 pagesDesign of Members Subject To Combined Bending and Torsion SCIFrederico DonagemmaNo ratings yet
- Lateral-Torsional Buckling PDFDocument11 pagesLateral-Torsional Buckling PDFAntuan KourosNo ratings yet
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Buckling Properties of Monosymmetric I-BeamsDocument37 pagesBuckling Properties of Monosymmetric I-Beamsscribd6062100% (1)
- Block Shear Connection Design Checks PDFDocument7 pagesBlock Shear Connection Design Checks PDF112160rbc100% (1)
- Effective Length Factor For The Design of X-Bracing SystemsDocument5 pagesEffective Length Factor For The Design of X-Bracing SystemsDianna LambertNo ratings yet
- IS: 8147 - Code of Practice For Use of Aluminium Alloys in StructuresDocument170 pagesIS: 8147 - Code of Practice For Use of Aluminium Alloys in StructuresbccharanNo ratings yet
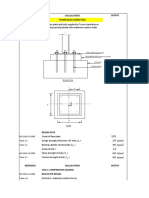
- Eccentric Load On Column Footing PDFDocument11 pagesEccentric Load On Column Footing PDFReffisa JiruNo ratings yet
- Checks For CompactnessDocument15 pagesChecks For CompactnessjologscresenciaNo ratings yet
- Elastic and Plastic Section Moduli of Steel Angles About Principal Axes PDFDocument8 pagesElastic and Plastic Section Moduli of Steel Angles About Principal Axes PDFSanket MistryNo ratings yet
- Prying ForceDocument133 pagesPrying Forcetigersronnie100% (1)
- Cruciform Sections + NSCApril06 - TechDocument3 pagesCruciform Sections + NSCApril06 - TechIho1No ratings yet
- Design of Crane Runway Beams With Channel Cap PDFDocument9 pagesDesign of Crane Runway Beams With Channel Cap PDFNguyen Duc CuongNo ratings yet
- Bolts Base Plate Design To Eurocode PDFDocument4 pagesBolts Base Plate Design To Eurocode PDFsskamalakannanNo ratings yet
- 4 Splice Connections ETOOLKITDocument27 pages4 Splice Connections ETOOLKITLesego Matojane100% (1)
- NCCI Vertical and Horizontal Deflection Limits For Multi-Storey Buildings PDFDocument8 pagesNCCI Vertical and Horizontal Deflection Limits For Multi-Storey Buildings PDFHerdean RemusNo ratings yet
- Cold Formed Sections DesignDocument17 pagesCold Formed Sections DesignSourabh Das100% (1)
- Concrete Beam Opening DesignDocument7 pagesConcrete Beam Opening DesignsravanNo ratings yet
- Torsion Moment Inertia STAADDocument2 pagesTorsion Moment Inertia STAADAngelo MoralNo ratings yet
- CUFSM tUTORIALDocument10 pagesCUFSM tUTORIAL^password0% (1)
- Wood& ArmerDocument9 pagesWood& ArmerthirumalaichettiarNo ratings yet
- Axially Loaded Columns - Base Plate DesignDocument2 pagesAxially Loaded Columns - Base Plate DesignaomareltayebNo ratings yet
- Beam Bending Strenght Aisc 9th EditionDocument17 pagesBeam Bending Strenght Aisc 9th EditionKory Estes100% (1)
- Shear Key or Shear Lug Design - US AISC SectionDocument3 pagesShear Key or Shear Lug Design - US AISC SectionYash PaulNo ratings yet
- Cap PlateDocument18 pagesCap PlateVinoth KumarNo ratings yet
- Lec26 - Design of Gusset PlateDocument13 pagesLec26 - Design of Gusset PlateOmisawantNo ratings yet
- Example II.C-5 HSS Chevron Brace Connection: F F F FDocument5 pagesExample II.C-5 HSS Chevron Brace Connection: F F F FVasilica BarbarasaNo ratings yet
- Amendment No. 1 April 2016 To Is 875 (Part 3) : 2015 Design Loads (Other Than Earthquake) For Buildings and Structures - Code of PracticeDocument70 pagesAmendment No. 1 April 2016 To Is 875 (Part 3) : 2015 Design Loads (Other Than Earthquake) For Buildings and Structures - Code of PracticeAncient Intellect50% (2)
- Advanced Steel Design PPT in PDFDocument88 pagesAdvanced Steel Design PPT in PDFaskcmiitm100% (1)
- Post Tension Flat SlabsDocument14 pagesPost Tension Flat Slabsrahulgehlot2008No ratings yet
- CE579 Half Course SummaryDocument192 pagesCE579 Half Course SummarySwarna RkNo ratings yet
- AISC Design Guide 29 - Vertical Bracing Connections - Analysis and Design 2 de 2 PDFDocument196 pagesAISC Design Guide 29 - Vertical Bracing Connections - Analysis and Design 2 de 2 PDFMartin Cristobal CupitayNo ratings yet
- Effective Length Factors For Gusset Plate BucklingDocument12 pagesEffective Length Factors For Gusset Plate Bucklingkaranderohan100% (2)
- SPACE GASS Plate Element Modeling and Meshing Webinar Q&A - 8 Oct 2019 PDFDocument4 pagesSPACE GASS Plate Element Modeling and Meshing Webinar Q&A - 8 Oct 2019 PDFIsoa Tupua0% (1)
- Pile Design Using Euro CodeDocument51 pagesPile Design Using Euro CodeDoreen PohNo ratings yet
- CB Value Significance PDFDocument5 pagesCB Value Significance PDFArchitjNo ratings yet
- Foundation Design (Biaxial Bending Maximum Stress)Document17 pagesFoundation Design (Biaxial Bending Maximum Stress)AVBPNo ratings yet
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Chapter Five, Torsion of BeamsDocument7 pagesChapter Five, Torsion of BeamsTemesgenAbiyNo ratings yet
- Chap.4.torsion DesignDocument45 pagesChap.4.torsion DesignChalachew MesfinNo ratings yet
- Beam TorsionDocument48 pagesBeam TorsionKory EstesNo ratings yet
- Quiz Newton Raphson SolutionDocument8 pagesQuiz Newton Raphson SolutionPrantik Adhar SamantaNo ratings yet
- Example: Is This Matrix Diagonalizable?Document1 pageExample: Is This Matrix Diagonalizable?Prantik Adhar SamantaNo ratings yet
- Caley Hamilton Theorem ProofDocument6 pagesCaley Hamilton Theorem ProofMariya Ivanova Vasileva100% (1)
- Cayle y Hamilton SystemsDocument15 pagesCayle y Hamilton SystemsPrantik Adhar SamantaNo ratings yet
- Fire SafetyDocument40 pagesFire SafetyPrantik Adhar SamantaNo ratings yet
- Multi Hazard Resistant New Construction or Reconstruction of BPL Houses in Flood Prone Alluvial AreasDocument16 pagesMulti Hazard Resistant New Construction or Reconstruction of BPL Houses in Flood Prone Alluvial AreasPrantik Adhar SamantaNo ratings yet
- Cable Price ListDocument2 pagesCable Price ListPrantik Adhar SamantaNo ratings yet
- Rev StaircaseDocument3 pagesRev StaircaseNaveen RevannaNo ratings yet
- Vertical Pull Out TestDocument4 pagesVertical Pull Out TestPrantik Adhar SamantaNo ratings yet
- Introduction To The Second Law: H.C. Van Ness (Understanding Thermodynamics)Document30 pagesIntroduction To The Second Law: H.C. Van Ness (Understanding Thermodynamics)julio cesarNo ratings yet
- Pipes For Civi and Industrial Installations OK PDFDocument24 pagesPipes For Civi and Industrial Installations OK PDFBruno ReisNo ratings yet
- DAihatsu Hijet Brochure CB EngineDocument6 pagesDAihatsu Hijet Brochure CB EngineErnielle Rae Dela Cruz100% (1)
- A History of Fluid DynamicsDocument33 pagesA History of Fluid DynamicsGonzalo MayorNo ratings yet
- Order Analysis ToolkitDocument16 pagesOrder Analysis ToolkitManuel Enrique Salas FernándezNo ratings yet
- Prestressed Concrete StructuresDocument73 pagesPrestressed Concrete StructuresMahesh Nayak100% (4)
- LS Srinath Four Chapters CompleteDocument137 pagesLS Srinath Four Chapters CompleteSunil SharmaNo ratings yet
- Cohesion and Adhesion in LiquidsDocument1 pageCohesion and Adhesion in LiquidsjmlagumbayNo ratings yet
- 4780-w8 Selection and Design of Branch Connections and ReinforcementDocument8 pages4780-w8 Selection and Design of Branch Connections and ReinforcementLorenaNo ratings yet
- Final Exam (Open) : Weld Reinf. 1/8" THKDocument7 pagesFinal Exam (Open) : Weld Reinf. 1/8" THKNuwan RanaweeraNo ratings yet
- Tightening of Non PreloadableDocument2 pagesTightening of Non PreloadableAtanasKostadinovNo ratings yet
- Saej2244 1v001Document9 pagesSaej2244 1v001bigtone2001No ratings yet
- NC-Code MillingDocument6 pagesNC-Code MillingCoeg MemoriesNo ratings yet
- Service Data Sheet: Standard - Automatic Defrost Top Freezer Models (R134A)Document2 pagesService Data Sheet: Standard - Automatic Defrost Top Freezer Models (R134A)luisperozoNo ratings yet
- Pad Eye StrengthDocument3 pagesPad Eye Strengthhyoung65No ratings yet
- BR Cat Cafs STD Eng R02 0 PDFDocument572 pagesBR Cat Cafs STD Eng R02 0 PDFRafael HenriquesNo ratings yet
- Modeling and Stability Analysis of Distributed GenerationDocument8 pagesModeling and Stability Analysis of Distributed Generationrudreshsj86No ratings yet
- Plate Heat ExchangerDocument28 pagesPlate Heat ExchangerFRANCISCO JOSE GARCIA IBAÑEZ100% (1)
- The Piping Material EngineerDocument10 pagesThe Piping Material EngineerFazlur Rehman ShahNo ratings yet
- Chapter 10 Single Phase Motors EE 342Document21 pagesChapter 10 Single Phase Motors EE 342Ali AhmadNo ratings yet
- Materials and Design: Tamer El Maaddawy, Mohamed El Sayed, Beckry Abdel-MagidDocument12 pagesMaterials and Design: Tamer El Maaddawy, Mohamed El Sayed, Beckry Abdel-MagidAziz ChNo ratings yet
- R53 Boost Gauge Install: Special NotesDocument5 pagesR53 Boost Gauge Install: Special NotesBolinha's Wash ClubNo ratings yet
- Boiling and Condensataion Condensataion: Prabal TalukdarDocument19 pagesBoiling and Condensataion Condensataion: Prabal TalukdarnivasssvNo ratings yet
- Corolla CVT T-SB-0150-16Document12 pagesCorolla CVT T-SB-0150-16ossoski100% (3)