You might also like
- V CurveDocument6 pagesV CurveKunalNo ratings yet
- Synchronous Motors and Power Factor CorrectionDocument1 pageSynchronous Motors and Power Factor Correctionashley_moseley1918No ratings yet
- Synchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field IsDocument11 pagesSynchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field Ispriyanka2711_dubeyNo ratings yet
- Electric Vehicle 4th ModuleDocument13 pagesElectric Vehicle 4th ModuleAmruth DeshpandeNo ratings yet
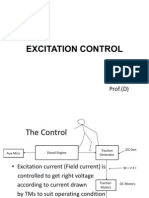
- ExcitationDocument27 pagesExcitationkr_abhijeet72356587No ratings yet
- I - Z ConstantDocument1 pageI - Z ConstantSamrat PvNo ratings yet
- Synchronous MotorsDocument11 pagesSynchronous MotorsSanjay GhoshNo ratings yet
- Synchronous MotorsDocument9 pagesSynchronous MotorsAndreea CoZmaNo ratings yet
- Electric Vehicle 4th ModuleDocument19 pagesElectric Vehicle 4th ModuleSimi BaniNo ratings yet
- Induction Generator & Linear MotorDocument21 pagesInduction Generator & Linear Motorpartha DasNo ratings yet
- Study of SMES Technology & Its Integration To AGC: and E, Connected Through Consider The Simple PowerDocument22 pagesStudy of SMES Technology & Its Integration To AGC: and E, Connected Through Consider The Simple PowerzahidNo ratings yet
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagaleNo ratings yet
- Effect of Field Change, Synchronous Condenser, Starting MethodsDocument30 pagesEffect of Field Change, Synchronous Condenser, Starting Methodsmalik karim dadNo ratings yet
- Apnot 125Document4 pagesApnot 125wilson2142No ratings yet
- What Is Soft Starting?: Having ThyristorsDocument2 pagesWhat Is Soft Starting?: Having ThyristorsDanish MujibNo ratings yet
- Rotating Machines and Transformers Unit 3 DC MOTOR CLASS NOTESDocument76 pagesRotating Machines and Transformers Unit 3 DC MOTOR CLASS NOTESSEDHURAJA SNo ratings yet
- Rohini 85904157554Document2 pagesRohini 85904157554GsheudhehNo ratings yet
- 099 V Curves of Syn Motor With Elect Loading Dol Starter Without ExcitorDocument10 pages099 V Curves of Syn Motor With Elect Loading Dol Starter Without ExcitorNiket SurawaseNo ratings yet
- Reactive Power and Voltage Control with Automatic Voltage RegulatorsDocument1 pageReactive Power and Voltage Control with Automatic Voltage RegulatorsA.YulyAsriamanNo ratings yet
- EM-II Lab 4Document4 pagesEM-II Lab 4Subhash KumarNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Chapter 5 PDFDocument45 pagesChapter 5 PDFAnnieNo ratings yet
- Synchronous Motors: (LEC.#4) (Electrical Machines-Ii) Subject Teacher: Engr. Ali AbbasDocument24 pagesSynchronous Motors: (LEC.#4) (Electrical Machines-Ii) Subject Teacher: Engr. Ali AbbasMalika RaniNo ratings yet
- V Curves Syn MotorDocument8 pagesV Curves Syn Motorvenkatv1986No ratings yet
- V and Inverted V Curves of Synchronous Motor TheoryDocument4 pagesV and Inverted V Curves of Synchronous Motor TheoryPrakash ArumugamNo ratings yet
- Induction GeneratorDocument12 pagesInduction GeneratorSumaira SaifNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- DC MACH - Chapter 5Document53 pagesDC MACH - Chapter 5marryjohnopalla05No ratings yet
- Synchronous MotorsDocument25 pagesSynchronous MotorsJan Edward L. SuarezNo ratings yet
- Unit 5 Excitation Control: Unit 5.1 Basic Informations of Systems Unit 5.2 Electronic Excitation SystemDocument19 pagesUnit 5 Excitation Control: Unit 5.1 Basic Informations of Systems Unit 5.2 Electronic Excitation SystemBala RajuNo ratings yet
- Synchronous condenser theory and applicationsDocument2 pagesSynchronous condenser theory and applicationsVivek SainiNo ratings yet
- DC - MOTOR by ML KhondokarDocument36 pagesDC - MOTOR by ML KhondokarMd Shahadat HossainNo ratings yet
- Electrics of LocomotivesDocument9 pagesElectrics of LocomotivesmajjisatNo ratings yet
- ELECTRICAL MACHINES TOPICSDocument22 pagesELECTRICAL MACHINES TOPICSJoshtyler 21No ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Synchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldDocument5 pagesSynchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldDeepak SekarNo ratings yet
- Excitation Systems of Synchronous MachinesDocument15 pagesExcitation Systems of Synchronous Machinesspark_star100% (1)
- What Is Excitation System - Definition & Types of Excitation System - Circuit GlobeDocument11 pagesWhat Is Excitation System - Definition & Types of Excitation System - Circuit GlobeSabaMannan123No ratings yet
- Synchronous GeneratorsDocument50 pagesSynchronous GeneratorsRajAnandNo ratings yet
- PMG PDFDocument6 pagesPMG PDFrajan_2002eeeNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- Mary June F. Avila BSME 3-EVEDocument2 pagesMary June F. Avila BSME 3-EVEZaxyNo ratings yet
- Agn093 BDocument13 pagesAgn093 BariwibowoNo ratings yet
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDocument22 pagesUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNo ratings yet
- Synchronous CondensersDocument15 pagesSynchronous Condenserspawan ranaNo ratings yet
- D.C Shunt Motors:: Page On Torque atDocument2 pagesD.C Shunt Motors:: Page On Torque atimbanooobs23No ratings yet
- Electric Motors - Hassan ElBanhawiDocument14 pagesElectric Motors - Hassan ElBanhawijesus_manrique2753No ratings yet
- EM2 - Final - Lecture 06ADocument16 pagesEM2 - Final - Lecture 06AShoaib KhanNo ratings yet
- Synchronous Condensers for Power Factor CorrectionDocument15 pagesSynchronous Condensers for Power Factor CorrectionPawan Rana100% (1)
- Isolation Transformers Reduce Drive Neutral Point VoltageDocument5 pagesIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111No ratings yet
- REGULATION TESTING OF SYNCHRONOUS MACHINESDocument10 pagesREGULATION TESTING OF SYNCHRONOUS MACHINESAbhishEk Singh67% (3)
- Automatic Voltage Captions RegulatorDocument10 pagesAutomatic Voltage Captions RegulatorJohn SagarNo ratings yet
- Power Analysis of PWM Motor Drives PDFDocument22 pagesPower Analysis of PWM Motor Drives PDFJaime Vanegas IriarteNo ratings yet
- EEE4005 Automatic Voltage ControlDocument41 pagesEEE4005 Automatic Voltage ControlAyush AgarwalNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- ResearchDocument1 pageResearchsouleyman hassanNo ratings yet
- Sprabt0 PDFDocument35 pagesSprabt0 PDFsouleyman hassanNo ratings yet
- On Grid Solar Micro InverterDocument18 pagesOn Grid Solar Micro Invertersouleyman hassanNo ratings yet
- Imyitwarire yDocument3 pagesImyitwarire ysouleyman hassanNo ratings yet
- Simulink Basics For Engineering Applications: Ashok Krishnamurthy and Siddharth SamsiDocument36 pagesSimulink Basics For Engineering Applications: Ashok Krishnamurthy and Siddharth SamsiAvinash DalwaniNo ratings yet
- Matlab Tutorial: 1 - MATLAB Quick Reference GuideDocument1 pageMatlab Tutorial: 1 - MATLAB Quick Reference Guidesouleyman hassanNo ratings yet
- The Following Is A Principle Diagram of A ThreeDocument1 pageThe Following Is A Principle Diagram of A Threesouleyman hassanNo ratings yet
- ResearchDocument1 pageResearchsouleyman hassanNo ratings yet
- Matlab - Colon Notation: Format Purpose A (:,J) A (I,:) A (:,:) A (J:K) A (:,J:K) A (:,:,K) A (I, J, K,:)Document2 pagesMatlab - Colon Notation: Format Purpose A (:,J) A (I,:) A (:,:) A (J:K) A (:,J:K) A (:,:,K) A (I, J, K,:)Hector PalaciosNo ratings yet
- Matlab Bitwise OperatorsDocument1 pageMatlab Bitwise Operatorssouleyman hassanNo ratings yet
- Quiz 1 Quiz 2 (2008)Document2 pagesQuiz 1 Quiz 2 (2008)Anonymous 55cH67eIxNo ratings yet
- Matlab AlgebraDocument6 pagesMatlab Algebrasouleyman hassanNo ratings yet
- ECE 602 Solution To Homework Assignment 4Document7 pagesECE 602 Solution To Homework Assignment 4souleyman hassanNo ratings yet
- EE3205 EMD Unit 1 and 2 Lecture NotesDocument86 pagesEE3205 EMD Unit 1 and 2 Lecture Notessouleyman hassanNo ratings yet
- EE3205 EMD Diagram NotesDocument20 pagesEE3205 EMD Diagram Notessouleyman hassanNo ratings yet
- Jordan Normal Form Explained for 2x2 and 3x3 MatricesDocument7 pagesJordan Normal Form Explained for 2x2 and 3x3 Matricessouleyman hassanNo ratings yet
- DC Transformer Model of Converters: Dynamics and Control of Power Converters Dr. Mutlu BoztepeDocument18 pagesDC Transformer Model of Converters: Dynamics and Control of Power Converters Dr. Mutlu Boztepesouleyman hassanNo ratings yet
- Jordan PDFDocument6 pagesJordan PDFsouleyman hassanNo ratings yet
- ECE 602 Solution To Homework Assignment 4Document7 pagesECE 602 Solution To Homework Assignment 4souleyman hassanNo ratings yet
- Isolated DC-DC Converters Transformer Circuit AnalysisDocument31 pagesIsolated DC-DC Converters Transformer Circuit AnalysisyashittitaNo ratings yet
- Ee 546 Lecture 1Document11 pagesEe 546 Lecture 1souleyman hassanNo ratings yet
- Fundamentals of Power Electronics (Robert W.Erickson, Dragan Maksimovic, 2e, 2001) - Book PDFDocument900 pagesFundamentals of Power Electronics (Robert W.Erickson, Dragan Maksimovic, 2e, 2001) - Book PDFsouleyman hassan80% (5)
- Ee 546 Lecture 4Document31 pagesEe 546 Lecture 4souleyman hassanNo ratings yet
- DC Transformer Model of Converters: Dynamics and Control of Power Converters Dr. Mutlu BoztepeDocument18 pagesDC Transformer Model of Converters: Dynamics and Control of Power Converters Dr. Mutlu Boztepesouleyman hassanNo ratings yet