You might also like
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Stepper Motor Guide: How Position Control WorksDocument4 pagesStepper Motor Guide: How Position Control Works1020-Santhosh kumar. JNo ratings yet
- Exp 7Document3 pagesExp 7Ashwini KothavaleNo ratings yet
- Interfacing Stepper Motor with 89C51Document5 pagesInterfacing Stepper Motor with 89C51Girish ChapleNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorSiddharth MishraNo ratings yet
- Stepper MotorDocument59 pagesStepper Motorya zool / يا زولNo ratings yet
- MicroDocument11 pagesMicroZac AndersonNo ratings yet
- Experiment 2 SALAZARDocument9 pagesExperiment 2 SALAZARgerand salazarNo ratings yet
- Name: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Document10 pagesName: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Izaan Ahmed KhanNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- Study and simulation of counters in linear integrated circuitsDocument6 pagesStudy and simulation of counters in linear integrated circuitsNaimur Asif BornoNo ratings yet
- Controlling Stepper Motor: Experiment #4Document9 pagesControlling Stepper Motor: Experiment #4Asaad HalayqaNo ratings yet
- Stepper Motor Interfacing With 8051 MCDocument3 pagesStepper Motor Interfacing With 8051 MCdishantgoel2019No ratings yet
- Arkan Kovan ABudllahDocument13 pagesArkan Kovan ABudllahYasir Yasir KovanNo ratings yet
- Speed and Power Control of DC MotorsDocument3 pagesSpeed and Power Control of DC MotorskrishnaNo ratings yet
- ITT270 Task3 RCS1103CDocument5 pagesITT270 Task3 RCS1103CAdib AfhamNo ratings yet
- Introduction to Robotics Periodical - Key ConceptsDocument4 pagesIntroduction to Robotics Periodical - Key ConceptsRAVI KIRAN REDDYNo ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078AvinashNo ratings yet
- Implement asynchronous counterDocument3 pagesImplement asynchronous counterUNCLE STATIONARYNo ratings yet
- Stepper MotorDocument9 pagesStepper Motorabdoo773719637No ratings yet
- Design of Fuzzy PID Controller For Brushless DC Motor: Research ArticleDocument10 pagesDesign of Fuzzy PID Controller For Brushless DC Motor: Research ArticleadilNo ratings yet
- Digital Electronics - Tutorial #1Document3 pagesDigital Electronics - Tutorial #1Dishawn NationNo ratings yet
- Digital Design Lab ReportDocument7 pagesDigital Design Lab ReportJohn DoeNo ratings yet
- Digital NAND Gate ImplementationDocument2 pagesDigital NAND Gate ImplementationMuhammad Algi AlgifariNo ratings yet
- DTC PPTDocument17 pagesDTC PPTmanoranjanottaNo ratings yet
- EXP-6 I51 Stepper MotorDocument3 pagesEXP-6 I51 Stepper MotorShamsul ArefinNo ratings yet
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Experiment 8: Counting Circuits: (Assignment)Document3 pagesExperiment 8: Counting Circuits: (Assignment)AL Asmr YamakNo ratings yet
- Lab 15Document5 pagesLab 15ALISHBA AZAMNo ratings yet
- The Ring CounterDocument4 pagesThe Ring CounterPraveen KumarNo ratings yet
- COMSATS UNIVERSITY ISLAMABAD DIGITAL LOGIC DESIGN LAB REPORTDocument16 pagesCOMSATS UNIVERSITY ISLAMABAD DIGITAL LOGIC DESIGN LAB REPORTwaleedNo ratings yet
- Fuzzy Logic Based Speed Control of BLDC Motor PDFDocument5 pagesFuzzy Logic Based Speed Control of BLDC Motor PDFtewodros asfawNo ratings yet
- Combinational Logic Circuits Experiment 4Document11 pagesCombinational Logic Circuits Experiment 4Vince abcdNo ratings yet
- See 1307Document181 pagesSee 1307EEEDEPTGECNo ratings yet
- U18ec038 - Ei - Lab 1Document7 pagesU18ec038 - Ei - Lab 1Timir PatelNo ratings yet
- Experiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelDocument7 pagesExperiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelTimir PatelNo ratings yet
- AN-1215 Maze Runner RobotDocument11 pagesAN-1215 Maze Runner RobotMukeshGuptaNo ratings yet
- Chapter 1: Further Sequential Logic Systems Synchronous CountersDocument34 pagesChapter 1: Further Sequential Logic Systems Synchronous CountersKKK enNo ratings yet
- FDDGDocument3 pagesFDDGaliffpadziNo ratings yet
- Development of 1 MW Output Power Level Gyrotron For ITER ECRH SystemDocument4 pagesDevelopment of 1 MW Output Power Level Gyrotron For ITER ECRH Systemom5886No ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073AvinashNo ratings yet
- Flexibility method for statically determinate trussesDocument5 pagesFlexibility method for statically determinate trussesfrancis_chokiNo ratings yet
- Digital Circuits - CountersDocument6 pagesDigital Circuits - CountersB.Prashant JhaNo ratings yet
- Stepper MotorDocument8 pagesStepper MotorHassan Muhammad ZahidNo ratings yet
- Expt 06-1Document5 pagesExpt 06-1Aurongo NasirNo ratings yet
- Logic Circuits & Switching Theory I: Quiz No.3 SET CDocument9 pagesLogic Circuits & Switching Theory I: Quiz No.3 SET CRussell ViadoNo ratings yet
- PCB Reprt (1) FinalDocument8 pagesPCB Reprt (1) FinalShamma SNo ratings yet
- Dieu Khien Dong Co BuocDocument3 pagesDieu Khien Dong Co Buocnguyenmanhtu_dktdNo ratings yet
- Lab 8 and 9 Group AssignmentDocument11 pagesLab 8 and 9 Group AssignmentMaryam KhalilNo ratings yet
- ELEG 310L Lab 4 (5179)Document7 pagesELEG 310L Lab 4 (5179)ghaliaNo ratings yet
- Atlas-1 PDFDocument31 pagesAtlas-1 PDFR.SubramanianNo ratings yet
- Experiment-11: Chalamala Sujith Reddy 19CS01009Document8 pagesExperiment-11: Chalamala Sujith Reddy 19CS01009Sujith ReddyNo ratings yet
- Fig 1: Half Adder Circuit.: Carry SumDocument3 pagesFig 1: Half Adder Circuit.: Carry SumSiva ArunNo ratings yet
- Angular Speed Control ReportDocument9 pagesAngular Speed Control ReportMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- ALU2123113 Lab InstructionsDocument13 pagesALU2123113 Lab InstructionsBoy of SteelNo ratings yet
- CountersDocument47 pagesCountersAnonymous iQVjcOhNo ratings yet
- Dados Das BarrasDocument2 pagesDados Das BarrasChande JúniorNo ratings yet
- Ee222 Lab 3Document9 pagesEe222 Lab 3Jakob NandNo ratings yet
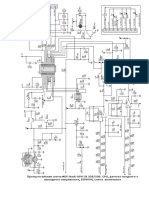
- Принципиальная схема ИБП Back-UPS CS 350/500. CPU, датчики входного и выходного напряжения, EEPROM, схема включенияDocument4 pagesПринципиальная схема ИБП Back-UPS CS 350/500. CPU, датчики входного и выходного напряжения, EEPROM, схема включенияAndré BrunoNo ratings yet
- TL-WPS510U V5 User Guide 1910010986 PDFDocument73 pagesTL-WPS510U V5 User Guide 1910010986 PDFonggoimamNo ratings yet
- RobotBASIC TutorialDocument7 pagesRobotBASIC Tutorialaloksahu1No ratings yet
- HC SR501Document3 pagesHC SR501Đàm ThếNo ratings yet
- Archer C2 User Guide PDFDocument143 pagesArcher C2 User Guide PDFGA16DETNo ratings yet
- Datasheet Arduino Duemilanove ATMEG328Document448 pagesDatasheet Arduino Duemilanove ATMEG328Caio LoksNo ratings yet
- DH61WW Product Guide 02 EnglishDocument78 pagesDH61WW Product Guide 02 EnglishElio PereiraNo ratings yet
- Archer C20i User Guide PDFDocument141 pagesArcher C20i User Guide PDFGA16DETNo ratings yet
- Warranty PDFDocument23 pagesWarranty PDFGA16DETNo ratings yet
- Shift registers: storage and movement of digital data in sequential logic circuitsDocument22 pagesShift registers: storage and movement of digital data in sequential logic circuitschoprahridyeshNo ratings yet
- Energia Solar Con ArduinoDocument7 pagesEnergia Solar Con ArduinosalokaNo ratings yet
- Simulator For ArduinoDocument26 pagesSimulator For ArduinoNinok Rizky AmaliaNo ratings yet
- Spring / Summer: WorkbookDocument142 pagesSpring / Summer: WorkbookGA16DETNo ratings yet
- LM35 Temperature SensorDocument13 pagesLM35 Temperature Sensorapi-3799604100% (1)
- Parts Diagrams and Lists for HP LaserJet P3010 PrintersDocument30 pagesParts Diagrams and Lists for HP LaserJet P3010 PrintersGA16DETNo ratings yet
- The LEGO MINDSTORMS EV3 Idea Book PDFDocument234 pagesThe LEGO MINDSTORMS EV3 Idea Book PDFGA16DETNo ratings yet
- 80+ Keyboard Shortcuts To Move Faster in Microsoft Outlook: Keystroke FunctionDocument4 pages80+ Keyboard Shortcuts To Move Faster in Microsoft Outlook: Keystroke FunctionUkeme OwohNo ratings yet
- Dell Service ManualDocument124 pagesDell Service Manual1224adhNo ratings yet
- BNET 50 Indispensable Word TipsDocument6 pagesBNET 50 Indispensable Word TipsarniesamNo ratings yet
- HC SR501Document3 pagesHC SR501Đàm ThếNo ratings yet
- Sw4548e PDFDocument152 pagesSw4548e PDFGA16DET100% (1)
- RobotBASIC TutorialDocument7 pagesRobotBASIC Tutorialaloksahu1No ratings yet
- EDOC - 001628 FusiblesDocument4 pagesEDOC - 001628 FusiblesGA16DETNo ratings yet
- Microcontroller Training Course on Stepper MotorsDocument20 pagesMicrocontroller Training Course on Stepper MotorsGA16DETNo ratings yet
- PhoenixDocument2 pagesPhoenixGA16DETNo ratings yet
- Shimano Anleitung ST5500 EN-SI6BS0E-EN PDFDocument1 pageShimano Anleitung ST5500 EN-SI6BS0E-EN PDFGA16DETNo ratings yet
- Informacion Tecnica Deka SolarDocument2 pagesInformacion Tecnica Deka SolarGA16DETNo ratings yet
- EDOC - 001624 Technical SpecificationDocument12 pagesEDOC - 001624 Technical SpecificationGA16DETNo ratings yet
- Reliable 12V industrial battery for security systemsDocument4 pagesReliable 12V industrial battery for security systemsGA16DETNo ratings yet
- RHPZ, A Two Way Control PathDocument11 pagesRHPZ, A Two Way Control PathkurabyqldNo ratings yet
- PIC16F145x PDFDocument404 pagesPIC16F145x PDFArsalan88No ratings yet
- Nonlinear Microwave and RF Circuits - Stephen - A - Mass PDFDocument13 pagesNonlinear Microwave and RF Circuits - Stephen - A - Mass PDFAnonymous 1czlPyNo ratings yet
- NTE950/951/977 100mA Voltage RegulatorsDocument3 pagesNTE950/951/977 100mA Voltage Regulatorsalexjcc10No ratings yet
- Water Level Controller Using 8051 Circuit PrincipleDocument4 pagesWater Level Controller Using 8051 Circuit PrincipleLappi SchematicsNo ratings yet
- HASLE Datasheet OverviewDocument2 pagesHASLE Datasheet OverviewkINGNo ratings yet
- NIC Components NAZJ SeriesDocument4 pagesNIC Components NAZJ SeriesNICCompNo ratings yet
- Special Forming ProcessDocument11 pagesSpecial Forming Processvelavansu0% (2)
- Standards List For ElectricalDocument46 pagesStandards List For ElectricalSunil PurohitNo ratings yet
- Chumbaka c520b Component ListDocument4 pagesChumbaka c520b Component ListSahrulRashidNo ratings yet
- EEE431 Module 2Document27 pagesEEE431 Module 2Victor ImehNo ratings yet
- P72x - EN T - C21 - V11DDocument334 pagesP72x - EN T - C21 - V11DTlili MahmoudiNo ratings yet
- SBS VRLA Type Front Terminal Range Summary PDFDocument2 pagesSBS VRLA Type Front Terminal Range Summary PDFehott23No ratings yet
- UNIT-1 Introduction To Facts: Need For Transmission Networks InterconnectionsDocument13 pagesUNIT-1 Introduction To Facts: Need For Transmission Networks InterconnectionsChetan KotwalNo ratings yet
- Magnetic Properties and Superconductivity: Code No. 07A1BS03 UNIT-3 Engineering PhysicsDocument11 pagesMagnetic Properties and Superconductivity: Code No. 07A1BS03 UNIT-3 Engineering PhysicsNizam Institute of Engineering and Technology LibraryNo ratings yet
- Unit-5: Semiconductor Memories and Programmable Logic DevicesDocument45 pagesUnit-5: Semiconductor Memories and Programmable Logic DevicesRidham chitreNo ratings yet
- Mcqs On BcsDocument1,172 pagesMcqs On Bcskomal bandleNo ratings yet
- AREVA 7.2 To 36KV PDFDocument16 pagesAREVA 7.2 To 36KV PDFRodrigo AndresNo ratings yet
- Sony TVC LCD Ke 32ts2uDocument99 pagesSony TVC LCD Ke 32ts2uGiada SpaccarotellaNo ratings yet
- SKEM 3742 Electro Pneumatic Labsheet PDFDocument7 pagesSKEM 3742 Electro Pneumatic Labsheet PDFWalter VermehrenNo ratings yet
- Measurement & Intrumentation: Made By: Engr. Danish Arif SiddiqiDocument52 pagesMeasurement & Intrumentation: Made By: Engr. Danish Arif SiddiqiMuhammad Usama Sharaf SAAFINo ratings yet
- Maximizing Solar Energy Collection Through TrackingDocument3 pagesMaximizing Solar Energy Collection Through Trackingtakethebow runNo ratings yet
- STA Book MergedDocument784 pagesSTA Book MergedvikasNo ratings yet
- Parts list for electronic componentsDocument178 pagesParts list for electronic componentsMarcos YanezNo ratings yet
- The Giant Book of Electronics ProjectsDocument496 pagesThe Giant Book of Electronics Projectsvoip54301100% (38)
- Design of a High-Frequency Planar Power Transformer in Multilayer TechnologyDocument7 pagesDesign of a High-Frequency Planar Power Transformer in Multilayer TechnologyJorge RestrepoNo ratings yet
- One Cycle ControlDocument9 pagesOne Cycle ControlNithin SebastianNo ratings yet
- Electrical Engineering - Electrical MachinesDocument78 pagesElectrical Engineering - Electrical MachinesSangeetha Veera0% (1)
- cv86 MeDocument18 pagescv86 Mecuongnv_19No ratings yet
- IR Remote Control Extender Circuit GuideDocument4 pagesIR Remote Control Extender Circuit GuideAhmedNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)