You might also like
- EE 001 Basic Electrical EngineeringDocument71 pagesEE 001 Basic Electrical EngineeringAlbert GambaNo ratings yet
- Laplace Transform 2020Document66 pagesLaplace Transform 2020Angeline Chasakara100% (2)
- Level 2 Cooling Tower CommissioningDocument12 pagesLevel 2 Cooling Tower CommissioningAnurag KumbhareNo ratings yet
- Lab 4Document15 pagesLab 4Aliqpsk AlasadyNo ratings yet
- Feedback and Control Systems: Activity No. 4 - Root Locus Analysis of SystemsDocument8 pagesFeedback and Control Systems: Activity No. 4 - Root Locus Analysis of SystemsYvesExequielPascua100% (1)
- 2-Lecture Notes Lesson4 4Document10 pages2-Lecture Notes Lesson4 4kstu1112No ratings yet
- PN64E8000GFXZA Fast Track Guide PDFDocument7 pagesPN64E8000GFXZA Fast Track Guide PDFboroda2410No ratings yet
- Modelling of Electrical SystemsDocument3 pagesModelling of Electrical SystemsPandu KNo ratings yet
- Unit Step Function in MatlabDocument6 pagesUnit Step Function in Matlabshaista005100% (3)
- Simulink NotesDocument7 pagesSimulink NotesNorizzatul AkmalNo ratings yet
- Radio Wave Propagation 2Document80 pagesRadio Wave Propagation 2Juliana Nepembe100% (1)
- Basic Tutorials MC in DC Motor ControlDocument5 pagesBasic Tutorials MC in DC Motor ControlAbdullah ÇakanNo ratings yet
- The Transfer FunctionDocument16 pagesThe Transfer FunctionSyuhadah NoordinNo ratings yet
- Ec3351 Control SystemsDocument18 pagesEc3351 Control SystemsParanthaman GNo ratings yet
- INDIABIX PART 3 ELEX MCQs 080918 PDFDocument41 pagesINDIABIX PART 3 ELEX MCQs 080918 PDFJehuNo ratings yet
- Review On Efficiency Improvement of 3 Phase Induction Motor PDFDocument10 pagesReview On Efficiency Improvement of 3 Phase Induction Motor PDFIjabiNo ratings yet
- Transfer Functions and LTI SystemsDocument21 pagesTransfer Functions and LTI SystemsP KNo ratings yet
- DC Circuits: Prepared byDocument12 pagesDC Circuits: Prepared byRuth DVNo ratings yet
- Transducer and Their ClassificationDocument2 pagesTransducer and Their ClassificationPujaChaudhuryNo ratings yet
- Lect11 Design Via State SpaceDocument49 pagesLect11 Design Via State SpaceMirza Riyasat AliNo ratings yet
- Design of Compensators Using Root Locus DiagramDocument20 pagesDesign of Compensators Using Root Locus DiagramAhmed ElbadrawiNo ratings yet
- Inter Intra Vehicle Wireless CommunicationDocument20 pagesInter Intra Vehicle Wireless CommunicationSuhi TeoNo ratings yet
- Laplace Transform (Notes)Document23 pagesLaplace Transform (Notes)Alex OsesNo ratings yet
- Topic: Ultrasonic Machining: Branch: PIE Sem: (V) Subject: Metal Cutting (PI-305)Document29 pagesTopic: Ultrasonic Machining: Branch: PIE Sem: (V) Subject: Metal Cutting (PI-305)Anonymous ML4hh4MOyBNo ratings yet
- CISE 316 Control Systems Design Lab ManualDocument78 pagesCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- DSP 2 MaarksDocument30 pagesDSP 2 MaarksThiagu RajivNo ratings yet
- M&e 18me51 NotesDocument156 pagesM&e 18me51 NotesRoman EmpireNo ratings yet
- Eee.60-62Document3 pagesEee.60-62skrtamilNo ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- DMS QB 2015 RDocument8 pagesDMS QB 2015 RKeerthe VaasanNo ratings yet
- ME 1402 - Mechatronics PDFDocument6 pagesME 1402 - Mechatronics PDFnagarajanceNo ratings yet
- Advanced Thermodynamics-3Document59 pagesAdvanced Thermodynamics-3Onggy Aries SekaNo ratings yet
- Focussed Question Bank With AnswersDocument18 pagesFocussed Question Bank With AnswersHari Krishnan100% (1)
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiNo ratings yet
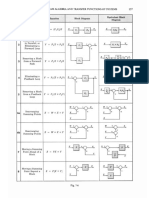
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDocument6 pagesCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNo ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- PID Controller Back UpDocument114 pagesPID Controller Back Upluli_pedrosaNo ratings yet
- USM Study of Parameters of USMDocument43 pagesUSM Study of Parameters of USMZoric BobbyNo ratings yet
- FeedCon (Unit 1)Document10 pagesFeedCon (Unit 1)Melissa LindayagNo ratings yet
- Activity 03Document11 pagesActivity 03kennethNo ratings yet
- Laplace TransformDocument277 pagesLaplace TransformAdHam AverrielNo ratings yet
- DC DC Converters (Lecture#03)Document40 pagesDC DC Converters (Lecture#03)usmangul_23No ratings yet
- Experiment No. 01 Introduction To System Representation and Observation Using MATLABDocument20 pagesExperiment No. 01 Introduction To System Representation and Observation Using MATLABRakayet RafiNo ratings yet
- Experiment 4Document5 pagesExperiment 4verboseNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- IV Characteristic TransistorDocument7 pagesIV Characteristic TransistorNida RidzuanNo ratings yet
- LS102: Linear Time-Invariant SystemsDocument8 pagesLS102: Linear Time-Invariant SystemsBayar JargalNo ratings yet
- Lecture # 3 (Thyristors)Document25 pagesLecture # 3 (Thyristors)UsmanIbrahimNo ratings yet
- Applied Electronics Lab 1Document9 pagesApplied Electronics Lab 1Rickel RoweNo ratings yet
- EE8072-MEMS and Nano ScienceDocument10 pagesEE8072-MEMS and Nano ScienceMs.Ezhilarasi ICE DepartmentNo ratings yet
- Ic1352 - Process Control-2 MarksDocument21 pagesIc1352 - Process Control-2 MarksKaushal Kishor100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Digital Control (BER4113)Document18 pagesDigital Control (BER4113)cipet imphal100% (1)
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 pagesChap10 - 2 - Stability of Closed-Loop Control SystemsSaidNo ratings yet
- Ic LabDocument43 pagesIc LabMohammed Younus100% (1)
- 12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsDocument30 pages12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsHamza KhanNo ratings yet
- Lab 3 QUBE-Servo First Principles Modeling Workbook (Student)Document6 pagesLab 3 QUBE-Servo First Principles Modeling Workbook (Student)Luis EnriquezNo ratings yet
- Characteristics of Non-Linear SystemsDocument24 pagesCharacteristics of Non-Linear SystemsCarlynMNo ratings yet
- FINAL IE Lab ManualDocument34 pagesFINAL IE Lab ManualAnudeex ShettyNo ratings yet
- Introduction To State Space AnalysisDocument63 pagesIntroduction To State Space AnalysisTamrat Zewde100% (1)
- Oscillator: RC Phase Shift OscillatorDocument9 pagesOscillator: RC Phase Shift OscillatorNishiya VijayanNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Workshop PracticeDocument2 pagesWorkshop PracticeJuliana NepembeNo ratings yet
- Power Measurements SlidesDocument8 pagesPower Measurements SlidesJuliana NepembeNo ratings yet
- WWW - Manaresults.co - In: Electrical MeasurementsDocument2 pagesWWW - Manaresults.co - In: Electrical MeasurementsJuliana NepembeNo ratings yet
- TXC1Document2 pagesTXC1Juliana NepembeNo ratings yet
- WMA SyllabusDocument4 pagesWMA SyllabusJuliana NepembeNo ratings yet
- RXD1 PDFDocument3 pagesRXD1 PDFJuliana NepembeNo ratings yet
- Sampling Distributions and Confidence Intervals For The MeanDocument19 pagesSampling Distributions and Confidence Intervals For The MeanJuliana NepembeNo ratings yet
- Microstrip Antenna PDFDocument4 pagesMicrostrip Antenna PDFJuliana NepembeNo ratings yet
- Electromag DemoDocument28 pagesElectromag DemoJuliana NepembeNo ratings yet
- Class B Audio Amplifier PDFDocument10 pagesClass B Audio Amplifier PDFJuliana NepembeNo ratings yet
- Design Patch Good PDFDocument6 pagesDesign Patch Good PDFJuliana NepembeNo ratings yet
- Meditation TimeDocument14 pagesMeditation TimeJuliana NepembeNo ratings yet
- ch2 44 50Document7 pagesch2 44 50Rafael Ohara NakagumaNo ratings yet
- The Role of Natural Resources in Economic DevelopmentDocument41 pagesThe Role of Natural Resources in Economic DevelopmentJuliana NepembeNo ratings yet
- Fläkt Marine AB: Design ConditionsDocument2 pagesFläkt Marine AB: Design ConditionsFlorin TarziuNo ratings yet
- Specification For A Thermocouple Surge ProtectorDocument4 pagesSpecification For A Thermocouple Surge ProtectoramilasriNo ratings yet
- DC Motor Circuits Notes 2up PDFDocument15 pagesDC Motor Circuits Notes 2up PDFgaradesiertoNo ratings yet
- LCD TV: User ManualDocument32 pagesLCD TV: User ManualCarlos Mota VilelaNo ratings yet
- Microsoft Word Jz20 t40 Jz20 J t40 Instal Guide 06 14Document6 pagesMicrosoft Word Jz20 t40 Jz20 J t40 Instal Guide 06 14Kleber Abarca PachecoNo ratings yet
- Efficient Design of FIR Filter Using Modified Booth MultiplierDocument5 pagesEfficient Design of FIR Filter Using Modified Booth MultiplierijsretNo ratings yet
- 16S Li-Ion CAN Bus Data FormatDocument2 pages16S Li-Ion CAN Bus Data FormatChandan ChethuNo ratings yet
- Pressure TransmittersDocument5 pagesPressure TransmittersMilosglNo ratings yet
- Service Manual: Color Television ReceiverDocument30 pagesService Manual: Color Television ReceiverAldo Fernando Guerra SantanderNo ratings yet
- Introduction To Power ElectronicsDocument22 pagesIntroduction To Power ElectronicsAtif SaleemNo ratings yet
- Principles of Communications - ReviewerDocument16 pagesPrinciples of Communications - Reviewerprince ian cruzNo ratings yet
- TPT 5609Document3 pagesTPT 5609Aram CastellanosNo ratings yet
- Li-Fi (Light Fidelity) The Future's Wireless Communication Using Visible Light CommunicationDocument4 pagesLi-Fi (Light Fidelity) The Future's Wireless Communication Using Visible Light CommunicationJay PankhaniyaNo ratings yet
- NR 900S New User Manual ENGDocument29 pagesNR 900S New User Manual ENGHồNg ThânNo ratings yet
- Quick Start Guide STVI With SMRTDocument39 pagesQuick Start Guide STVI With SMRTRK KNo ratings yet
- AI 210 InstrumentationDocument52 pagesAI 210 InstrumentationRaju SkNo ratings yet
- MB Manual Ga-Z97 (h97) - d3hDocument80 pagesMB Manual Ga-Z97 (h97) - d3hdstoic1No ratings yet
- Automatic Speed BreakerDocument6 pagesAutomatic Speed BreakerIJRASETPublicationsNo ratings yet
- 01 Lesson1. ElectrochemistryDocument11 pages01 Lesson1. ElectrochemistryBianca VacunawaNo ratings yet
- Dual Operational AmplifierDocument5 pagesDual Operational AmplifierPablo Diego Cecere CasadoNo ratings yet
- Fracmemristor Chaotic Oscillator With MultistableDocument15 pagesFracmemristor Chaotic Oscillator With MultistablepunithNo ratings yet
- XO Agent List 20230204Document91 pagesXO Agent List 20230204junaidjabbar972No ratings yet
- DPS SMC ConfiguracionDocument76 pagesDPS SMC ConfiguracionAlejandro Armendáriz PérezNo ratings yet
- Hitron BRG-35503 Datasheet PDFDocument2 pagesHitron BRG-35503 Datasheet PDFTecnica Santa FeNo ratings yet
- Electrics TLTDocument57 pagesElectrics TLTМаксым КовальськыйNo ratings yet
- Liang 2021 Roadmap On Magnetoelectric MaterialDocument110 pagesLiang 2021 Roadmap On Magnetoelectric MaterialZhengwei TanNo ratings yet