You might also like
- Symmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandSymmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionRating: 4 out of 5 stars4/5 (2)
- 0263 8231 (84) 90004 1 PDFDocument22 pages0263 8231 (84) 90004 1 PDFjuan carlos molano toroNo ratings yet
- Application of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsDocument13 pagesApplication of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsKunal RajaNo ratings yet
- Eddy Current InversionDocument12 pagesEddy Current InversionDaniele Di BenedettoNo ratings yet
- Power Flow Calculation by Combination of Newton-Raphson Method and Newton's Method in OptimizationDocument4 pagesPower Flow Calculation by Combination of Newton-Raphson Method and Newton's Method in OptimizationAbdulrahmanNo ratings yet
- Numerical Aspects of Multiionic Transport in Electrolytic SolutionsDocument6 pagesNumerical Aspects of Multiionic Transport in Electrolytic SolutionsUmed Abd-alsatarNo ratings yet
- NUMERICAL SIMULATION OF THE DAM BREAK PROBLEMDocument4 pagesNUMERICAL SIMULATION OF THE DAM BREAK PROBLEMEndless LoveNo ratings yet
- DCinv V6 Rev2 CleanDocument38 pagesDCinv V6 Rev2 Cleanyasirarafat91No ratings yet
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocument2 pages" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadNo ratings yet
- FEM - Arc-Lenght - Sumup TechniquesDocument11 pagesFEM - Arc-Lenght - Sumup TechniquesabimalainNo ratings yet
- Collings1978 PDFDocument12 pagesCollings1978 PDFchristopheNo ratings yet
- The Use Quasi Comparison Functions With Rayleigh Ritz Method Beam PDFDocument7 pagesThe Use Quasi Comparison Functions With Rayleigh Ritz Method Beam PDFGabriel Ferrario100% (1)
- Numerical methods to evaluate EM fields below overhead transmission linesDocument5 pagesNumerical methods to evaluate EM fields below overhead transmission linesingenvictorNo ratings yet
- Solution of Steady-State, Convective Transport Equation Using An Upwind Finite Element SchemeDocument9 pagesSolution of Steady-State, Convective Transport Equation Using An Upwind Finite Element SchemechrissbansNo ratings yet
- High Field Transport in Semiconductors Based On Eigenvalue Solution To BoltzmannDocument4 pagesHigh Field Transport in Semiconductors Based On Eigenvalue Solution To Boltzmannsh0001No ratings yet
- Discontinuous collocation methods restore accuracy for gravitational self-force PDEsDocument29 pagesDiscontinuous collocation methods restore accuracy for gravitational self-force PDEsbabistokasNo ratings yet
- A Cartesian Grid Method For Solving The Two-Dimensional Streamfunction-Vorticity Equations in Irregular RegionsDocument45 pagesA Cartesian Grid Method For Solving The Two-Dimensional Streamfunction-Vorticity Equations in Irregular RegionsHamid MojiryNo ratings yet
- FDLF TracinBifurcationDocument6 pagesFDLF TracinBifurcationLuis MuñozNo ratings yet
- A Simple and Effective Solution of The Elastica Problem (Companile and Hasse)Document4 pagesA Simple and Effective Solution of The Elastica Problem (Companile and Hasse)Jason UchennnaNo ratings yet
- 1995_WongDocument6 pages1995_WongJaqueline RezendeNo ratings yet
- Belga Cem 2014Document4 pagesBelga Cem 2014kurts010No ratings yet
- S. G. P. K.: Computers and B'luidsDocument18 pagesS. G. P. K.: Computers and B'luidscalculator1No ratings yet
- Emt 1Document6 pagesEmt 1johnny SalazarNo ratings yet
- Numerical Accuracy in The Solution of The ShallowDocument8 pagesNumerical Accuracy in The Solution of The ShallowFernando Robles AguilarNo ratings yet
- Nonlinear System Identification With Prior Knowledge of The Region of AttractionDocument19 pagesNonlinear System Identification With Prior Knowledge of The Region of AttractionJessica JaraNo ratings yet
- A New Efficient Method For Load-Flow Solution For Radial Distribution NetworksDocument8 pagesA New Efficient Method For Load-Flow Solution For Radial Distribution NetworksjorgiieNo ratings yet
- Main Paper PDFDocument22 pagesMain Paper PDFRevanth VennuNo ratings yet
- Quantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsDocument9 pagesQuantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsJonas AraújoNo ratings yet
- Simulate HVDC cables and transmission lines with improved accuracy at low frequenciesDocument7 pagesSimulate HVDC cables and transmission lines with improved accuracy at low frequenciesEmir JusićNo ratings yet
- Computational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Document15 pagesComputational Aerodynamics: Name:Akhil Raj - Awale ROLL NO:17951A2105Jaikar Jaikar RahulNo ratings yet
- A New Power Flow Method for Radial Distribution SystemsDocument6 pagesA New Power Flow Method for Radial Distribution Systemswashington castro canazaNo ratings yet
- Geometric nonlinear analysis of space framesDocument11 pagesGeometric nonlinear analysis of space framesJONATHAN JUSTINO APOS CASSIMIRONo ratings yet
- Applied Numerical Mathematics: Oszkár Bíró, Gergely Koczka, Kurt PreisDocument15 pagesApplied Numerical Mathematics: Oszkár Bíró, Gergely Koczka, Kurt PreishestizaNo ratings yet
- (15200493 - Monthly Weather Review) AN ENERGY-CONSERVING DIFFERENCE SCHEME FOR THE STORM SURGE EQUATIONSDocument7 pages(15200493 - Monthly Weather Review) AN ENERGY-CONSERVING DIFFERENCE SCHEME FOR THE STORM SURGE EQUATIONSabyss1988No ratings yet
- Evaluation of Two-Layer Pavements Using Dimensional AnalysisDocument12 pagesEvaluation of Two-Layer Pavements Using Dimensional AnalysisAlfredo López HernándezNo ratings yet
- A Charge Simulation Method For The Calculation of High Voltage FieldsDocument9 pagesA Charge Simulation Method For The Calculation of High Voltage FieldsAhmed Taleb SheblNo ratings yet
- 8 Askoblar Et AlDocument7 pages8 Askoblar Et AlRafaela RibeiroNo ratings yet
- P. Wen, M. Aliabadi, D. Rooke 1998. Cracks in Three Dimensions. A Dynamic Dual Boundary Element AnalysisDocument13 pagesP. Wen, M. Aliabadi, D. Rooke 1998. Cracks in Three Dimensions. A Dynamic Dual Boundary Element AnalysisLeonardo BernardoNo ratings yet
- Generalization of Selective Harmonic Control/Elimination: Jwells@uiuc - Edu Plchapma@uiuc - Edu Krein@uiuc - EduDocument6 pagesGeneralization of Selective Harmonic Control/Elimination: Jwells@uiuc - Edu Plchapma@uiuc - Edu Krein@uiuc - Edufade2548No ratings yet
- Design and Analysis of Guyed Transmission Towers Using Computer ModelingDocument7 pagesDesign and Analysis of Guyed Transmission Towers Using Computer ModelingVictor BelafonteNo ratings yet
- Castelliz 1974Document8 pagesCastelliz 1974Soledad AceitunoNo ratings yet
- MOCDocument7 pagesMOCAKHILESH PASWANNo ratings yet
- Semlyen 9842 2834Document9 pagesSemlyen 9842 2834Isai SantanaNo ratings yet
- A Robust Power Flow Algorithm For Radial Distribution SystemsDocument8 pagesA Robust Power Flow Algorithm For Radial Distribution SystemsKafir KafirNo ratings yet
- HELM PosterDocument1 pageHELM Postert3ddy_bearNo ratings yet
- Supporting Random Wave Models A QuantumDocument7 pagesSupporting Random Wave Models A QuantumAlejandro SaenzNo ratings yet
- CARVER, Pseudo Characteristic Method of Lines Solution of First Order Hyperbolic EquationDocument6 pagesCARVER, Pseudo Characteristic Method of Lines Solution of First Order Hyperbolic EquationDanielle WatsonNo ratings yet
- Method for solving load flow in radial distribution networksDocument9 pagesMethod for solving load flow in radial distribution networksouali fatehNo ratings yet
- Spe 21224 PaDocument9 pagesSpe 21224 PaJair ParraNo ratings yet
- Direct Nonlinear Analysis Using Nathan-a MethodDocument15 pagesDirect Nonlinear Analysis Using Nathan-a MethodNathanNo ratings yet
- Load Flow AnalysisDocument36 pagesLoad Flow AnalysisRajashekher Goud Koyyeda100% (1)
- The Influence of The Lorenz System Fractionality oDocument5 pagesThe Influence of The Lorenz System Fractionality oJulexy AntonellaNo ratings yet
- Computers and Mathematics With Applications: Maddu Shankar, S. SundarDocument11 pagesComputers and Mathematics With Applications: Maddu Shankar, S. SundarAT8iNo ratings yet
- An Anisotropic Diffusion Regularized Demons For Improved Registration of Sliding OrgansDocument4 pagesAn Anisotropic Diffusion Regularized Demons For Improved Registration of Sliding OrgansIzudin SoftićNo ratings yet
- An Aggregation Multilevel Iterative Solver With Shift Acceleration For Eigenvalue Analysis of Large-Scale StructuresDocument9 pagesAn Aggregation Multilevel Iterative Solver With Shift Acceleration For Eigenvalue Analysis of Large-Scale Structurespio mirandaNo ratings yet
- Neuber Technique For Elastic Plastic CorrelationDocument9 pagesNeuber Technique For Elastic Plastic CorrelationVamsee Gowtham AnanthapalliNo ratings yet
- Anisotropic flow from perturbations in Gubser solutionsDocument15 pagesAnisotropic flow from perturbations in Gubser solutionsTabish ShibliNo ratings yet
- N-S Equations: Deriving Pressure Poisson EquationDocument3 pagesN-S Equations: Deriving Pressure Poisson EquationSaumya SinhaNo ratings yet
- Electromagnetic Modeling of Complex Railgun GeometriesDocument7 pagesElectromagnetic Modeling of Complex Railgun GeometriesAnusha ManthaNo ratings yet
- Voltage Stability Analysis BY Simulated Annealing AlgorithmDocument7 pagesVoltage Stability Analysis BY Simulated Annealing AlgorithmInternational Journal of Engineering and TechniquesNo ratings yet
- 01 - Microstructural Investigation On Mechanical Behavior of Soil Geosynthetic InterfaceDocument14 pages01 - Microstructural Investigation On Mechanical Behavior of Soil Geosynthetic InterfacenoebladimirNo ratings yet
- 1 Structures 5Document474 pages1 Structures 5TinaNo ratings yet
- Structural Analysis With The Finite Element Method Linear Statics Volume 1, Basis and Solids - E.OñateDocument495 pagesStructural Analysis With The Finite Element Method Linear Statics Volume 1, Basis and Solids - E.OñateSerruchin 84100% (26)
- Structural Analysis With The Finite Element Method Linear Statics Volume 1, Basis and Solids - E.OñateDocument495 pagesStructural Analysis With The Finite Element Method Linear Statics Volume 1, Basis and Solids - E.OñateSerruchin 84100% (26)
- Teaching Lean Thinking Principles Through Hands-On SimulationsDocument17 pagesTeaching Lean Thinking Principles Through Hands-On Simulationseduardo_umNo ratings yet
- Distribution of Earth's WaterDocument18 pagesDistribution of Earth's WaterMIGUELNo ratings yet
- 4 - Electrical Energy Use in The Home PDFDocument11 pages4 - Electrical Energy Use in The Home PDFMIGUELNo ratings yet
- Problema ResueltoDocument8 pagesProblema ResueltoJInez Harrison Alvites AscueNo ratings yet
- 2 Runoff 2Document12 pages2 Runoff 2JInez Harrison Alvites AscueNo ratings yet
- CanalesDocument18 pagesCanalesJInez Harrison Alvites AscueNo ratings yet
- 3 Infiltration 1Document34 pages3 Infiltration 1JInez Harrison Alvites AscueNo ratings yet
- Horton Infiltration ParametersDocument1 pageHorton Infiltration ParametersJInez Harrison Alvites AscueNo ratings yet
- Infiltration RatesDocument7 pagesInfiltration RatesJInez Harrison Alvites AscueNo ratings yet
- Irrigation de MM andDocument38 pagesIrrigation de MM andJInez Harrison Alvites AscueNo ratings yet
- 5 HydrologyDocument41 pages5 HydrologyJoji Ann Uayan100% (1)
- Diseño en Acero y Madera - AranisDocument46 pagesDiseño en Acero y Madera - AranisPaulo Likey100% (1)
- Clasificacion de SuelosDocument26 pagesClasificacion de SuelosJInez Harrison Alvites AscueNo ratings yet
- Una Herramienta de Análisis y Pronóstico de PrecipitacionesDocument16 pagesUna Herramienta de Análisis y Pronóstico de PrecipitacionesJInez Harrison Alvites AscueNo ratings yet
- Calculo de Fuerzas en Los NodosDocument19 pagesCalculo de Fuerzas en Los NodosFredyNo ratings yet
- Science of The Total EnvironmentDocument9 pagesScience of The Total EnvironmentJInez Harrison Alvites AscueNo ratings yet
- Louis Kahn's Insights on Architectural Design for Glare and Breeze in AngolaDocument21 pagesLouis Kahn's Insights on Architectural Design for Glare and Breeze in AngolaBeatriz OliveiraNo ratings yet
- Iso 4582 1980Document8 pagesIso 4582 1980Ruwan Sampath WickramathilakaNo ratings yet
- CHEM 1211K Lab Fall 2020: Submission GuideDocument3 pagesCHEM 1211K Lab Fall 2020: Submission GuideParker Santo DomingoNo ratings yet
- M5 - Freedom of The Human PersonDocument8 pagesM5 - Freedom of The Human PersonMarisol OtidaNo ratings yet
- Small Sewage Treatment Plant PDFDocument44 pagesSmall Sewage Treatment Plant PDFNGUYEN EthanNo ratings yet
- Rate Constant 2Document4 pagesRate Constant 2ShabanaNo ratings yet
- Goldspink & Kay, 2007 PDFDocument15 pagesGoldspink & Kay, 2007 PDFPantelis TsavalasNo ratings yet
- International Review of Research in Open and Distributed LearningDocument12 pagesInternational Review of Research in Open and Distributed LearningMc. Jordan QuilangNo ratings yet
- Greater Noida HousingDocument42 pagesGreater Noida HousingYathaarth RastogiNo ratings yet
- Game Theory in Economics and Beyond: Larry SamuelsonDocument26 pagesGame Theory in Economics and Beyond: Larry SamuelsonThanh Thư NguyễnNo ratings yet
- Watching TV ads or internet ads? Pros, cons and preferencesDocument5 pagesWatching TV ads or internet ads? Pros, cons and preferencesJiaqi LiNo ratings yet
- In Corean-JKoreanTunnelUndergrSpacAssoc-v15n6-2013-EvaluationRockLoadBasedCriticalShearStrainConceptTunnels-Kim Et AlDocument17 pagesIn Corean-JKoreanTunnelUndergrSpacAssoc-v15n6-2013-EvaluationRockLoadBasedCriticalShearStrainConceptTunnels-Kim Et AlClovis GonzattiNo ratings yet
- DWDM PP AeDocument1 pageDWDM PP AeAmit SwarNo ratings yet
- BSBADM502 Assessment Task 1 Global V1.1 Jan 21Document5 pagesBSBADM502 Assessment Task 1 Global V1.1 Jan 21Gorkhali GamingNo ratings yet
- Developmental Psychology-Revised 2018Document51 pagesDevelopmental Psychology-Revised 2018Aadya PoddarNo ratings yet
- NGS QC MetricsDocument7 pagesNGS QC MetricsAgustin BernacchiaNo ratings yet
- ESE 601 Week 4 Assignment Universal Learning Characteristic1Document5 pagesESE 601 Week 4 Assignment Universal Learning Characteristic1Homeworkhelpbylance0% (1)
- SDT Pipedrive Sales Dashboard TemplateDocument10 pagesSDT Pipedrive Sales Dashboard TemplateMANEESH SINGHNo ratings yet
- Mathematics Reference Books: No. Name Author PublisherDocument1 pageMathematics Reference Books: No. Name Author PublisherDelicateDogNo ratings yet
- Effectiveness of STEM learning approach among Malaysian secondary studentsDocument11 pagesEffectiveness of STEM learning approach among Malaysian secondary studentsJHON PAUL REGIDORNo ratings yet
- Emotional Mastery For Children Training NotesDocument27 pagesEmotional Mastery For Children Training NotesZayed HossainNo ratings yet
- EONSOLV 135 MSDS Safety DataDocument11 pagesEONSOLV 135 MSDS Safety DataChristiyan Chandra AntonoNo ratings yet
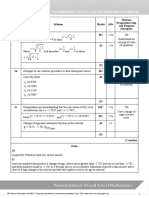
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- Black Iron Amended PEA PDFDocument372 pagesBlack Iron Amended PEA PDFemerson sennaNo ratings yet
- Plant Floor Safety: Summer EditionDocument72 pagesPlant Floor Safety: Summer EditionStefanos DiamantisNo ratings yet
- ASTM B265 - 13aDocument10 pagesASTM B265 - 13areza acbariNo ratings yet
- E-RPMS PORTFOLIO (Design 3)_DepEdClickDocument51 pagesE-RPMS PORTFOLIO (Design 3)_DepEdClickauhsoj raluigaNo ratings yet
- Perret Mahindra SeminarDocument32 pagesPerret Mahindra SeminarBeowulf StarkNo ratings yet
- Geology Lesson PlanDocument6 pagesGeology Lesson Planapi-501773574No ratings yet
- Ded Moroz Minitheme by SlidesgoDocument41 pagesDed Moroz Minitheme by SlidesgoTazkia AuditaNo ratings yet