Professional Documents
Culture Documents
LIC Lab Manual
Uploaded by
oniza shaikhOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
LIC Lab Manual
Uploaded by
oniza shaikhCopyright:
Available Formats
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Pin Details of IC 741:
Logic Symbol of IC 741:
Specifications for IC 741
Supply Voltage ±22 V
Input Voltage ±15 V
Power Dissipation = 500 mW
Operating Temperature Range -55˚C to 25˚C
Electrical Characteristics
S. No Characteristics Minimum Maximum
1 Input bias current 50nA 80 nA
2 Input Voltage range ±12 V ±15 V
3 Supply Current 1.7mA 2.8A
Circuit Diagram of Inverting Amplifier:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
1
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design Procedure:
ACL = 1; R1 = 1KΩ
ACL = Vo / Vi = - Rf / R1
Rf = ACL × R1 = 1KΩ
Tabulation:
Input Voltage (Vin) Output Voltage VO in Volts
S. No
in Volts Theoretical Value Practical Value
EXP. NO :1
DATE : LINEAR OPERATIONAL AMPLIFIER CIRCUITS
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
2
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
----------------------------------------------------------------------------------------------
Aim:
To design, construct and test the following linear operational amplifier circuits
(1) Inverting amplifier (2) Non-inverting amplifier
(3) Voltage follower (4) Summing Amplifier
(5) Integrator (6) Differentiator
(7) Subtractor
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
7 Signal generator
Theory:
Inverting Amplifier:
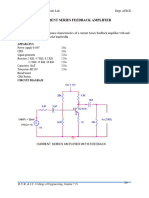
The inverting amplifier is the most widely used in all the op-amp
circuits. The output voltage VO is fed back to inverting input terminal through the R f - R1
network where Rf is the feedback resistor. The input signal Vi is applied to the inverting
input terminal through R1 and non-inverting input terminal of op-amp is grounded.
VO = (Rf / R1) Vi
ACL = Vo / Vi = - Rf / R1
The Negative sign indicates a phase shift of 180˚ between input (Vi) and Output (Vo).
Non-Inverting Amplifier:
The non inverting amplifier circuit amplifies without inverting the
input signal. In this circuit, the input is applied to the non inverting input terminal and
inverting input terminal is grounded such a circuit is called non inverting amplifier. It is
also having a negative feedback system as output is fed back to the inverting input
terminal.
VO = (1+ (Rf / R1) Vi
ACL = Vo / Vi = 1+ (Rf / R1)
Circuit Diagram of Inverting Amplifier:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
3
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design Procedure:
ACL = 2; R1 = 1KΩ
ACL = Vo / Vi = 1+ (Rf / R1) = 2
Rf = (ACL-1) × R1 = 1KΩ
Tabulation:
Input Voltage (Vin) Output Voltage VO in Volts
S. No
in Volts Theoretical Value Practical Value
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
4
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Voltage Follower:
In this circuit, the output voltage is equal to the input voltage both
in magnitude and phase i.e. output follows the input. So, the circuit is called voltage
follower. Input is applied to non inverting input and the output is directly connected to
inverting input.
VO = Vi
Procedure:
1. Make the connections as per the circuit diagram.
2. Vary the input voltage using regulated DC power supply then measure and
tabulate the corresponding output voltage.
3. Compare theoretical Output with the actual output obtained from the circuit.
Circuit Diagram for Voltage Follower:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
5
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design Procedure:
VO = Vi
Tabulation:
Input Voltage (Vin) Output Voltage VO in Volts
S. No
in Volts Theoretical Value Practical Value
Summing Amplifier (summer):
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
6
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
The operational amplifier is used to design a circuit whose output is
equal to sum of the several input signals. Such a circuit is known as summer. It has two
configurations as (1) Inverting Summer amplifier (2) Non – inverting summing amplifier.
(1) Inverting summing amplifier, the input is given to the inverting input terminal of op-
amp. The circuit output is the inverted sum.
VO = [(Rf / R1) V1 + (Rf / R2) V2
(2) Non inverting summing amplifier, the input is given to the non inverting input
terminal of operational amplifier. The output of the circuit is non inverted sum.
Circuit Diagram for Summing Amplifier:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
7
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design Procedure:
VO = [-(Rf / R1) V1 + (Rf / R2) V2]
R1= R2 = Rf
R1= R2 = Rf = 1KΩ
VO = - [V1 + V2]
Tabulation:
Input Voltage (Vin)
Output Voltage VO in Volts
S. No in Volts
V1 V2 Theoretical Value Practical Value
6
Difference Amplifier (Subtractor):
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
8
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
A circuit that amplifies the difference between the two signals is
called difference amplifier. This type of amplifiers is mostly used in instrumentation
circuit.
VO = (Rf / R1) (V1-V2)
The main purpose of the difference amplifier stage is to provide high gain to the
difference mode signal and cancel the common mode signal i.e., it should have high
CMRR.
Differentiator:
One of the simplest of the op-amp circuits that contain capacitor is the
differentiating amplifier or differentiator. As the name Differentiator suggests, the circuit
performs the mathematical operation of differentiation. That is, the output waveform is
the derivative of input waveform. But by using the differentiator at high frequencies, it
may becomes unstable and break into oscillation. The impedance at input also decreases
with increase in frequency; thereby making the circuit sensitive to high frequency noise.
Analysis of Practical Differentiator:
As the input current of op-amp is zero, there is no current input at
node B. Hence it is at the ground potential. From the concept of virtual ground, node A is
also at the ground potential and hence VB = VA = 0V.
Circuit Diagram for Difference Amplifier:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
9
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design Procedure:
R1= R2 = 1KΩ
R3 = Rf = 4.7 KΩ
VO = (Rf / R1) [V1 - V2]
Tabulation:
Input Voltage (Vin)
Output Voltage VO in Volts
S. No in Volts
V1 V2 Theoretical Value Practical Value
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
10
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
For the current I, we can write,
V -V
I = in A ----------------- V = 0
Z A
1
V
I = in Where Z = R in series with C
Z 1 1 1
1
So in Laplace domain we can write,
1 1+ sR C
Z =R + = 1 1
1 1 sC sC
1 1
sC Vin (s)
I = 1
1+ sR C
1 1
Now the current I is,
1
V -V V
I = A O =- O
1 R R
f f
V (s)
In Laplace, I =- O
1 R
f
d (V - V ) dV
and I =C A O =-C O
2 f dt f dt
Taling Laplace Transform we get,
I = - sC Vo (s)
2 f
Applying KCL at node A,
I = I +I
1 2
sC Vin (s) V (s)
1 =- O - sC Vo (s)
1+ sR C R f
1 1 f
-sR C V (s)
f 1 in
V (s) =
O
[1+ s Cf R f ] [1+ s C1 R1 ]
If C R = C R then
f f 1 1
-sR f C1Vin(s)
V (s) =
O 2
1+ s C1 R1
The time constant R C is much greater than R C or R C and hence
f 1 1 1 f f
the equation becomes
V (s) = - sR C V (s)
O f 1 in
dVin (t) d
VO (t) = - R f C1 ------------ as s=
dt dt
The output voltage is the R C times the differentiation of the input.
f 1
Circuit Diagram for Differentiator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
11
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
dVi 1
V =-R C R = 1.6KΩ R = 1KΩ f =1KHz =
O f 1 dt f 1 2πR C
f 1
1 R ×R
C =
1 2πf R
= 0.16μf ; R eq = 1 f = 615Ω
f R +R
1 f
Model Graph:
Integrator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
12
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
One of the simple op-amp circuits that also contain the capacitor is known as
integrator. As the name integrator suggests, the circuit performs the mathematical
operation of integration. That is, the output waveform is the integration of input
waveform.
Analysis of Practical Integrator:
As the input of op-amp is zero, the node B still at ground potential. Hence the
node A is also at the ground potential from the concept of virtual ground. So, VA = 0.
(V -V )
I = in A ----------------- V = 0
R A
1
V
I = in
R
1
d (V - V )
Similarly I =-C A O
1 f dt
dV
=- C A
f dt
V -V
And I = A O
2 R
f
V
=- O
R
f
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
13
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column: Differentiator
Input Voltage (Vi) in Output Voltage (Vo)
S.NO Time period in ms
volts in volts
Tabular Column: Integrator
Input Voltage (Vi) in Output Voltage (Vo)
S.NO Time period in ms
volts in volts
Procedure for Differentiator and Integrator:
1. Make the Connections as per the circuit diagram.
2. Set the 1 KHz square wave input using function generator and obtain the output
waveform on the CRO.
3. Determine and tabulate the amplitude, time period of the output waveform.
4. Draw the graph for output.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
14
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
At node A, applying KCL
I =I +I
1 2
V dV V
in = - C O - O
R f dt R
1 f .
Taking Laplace transform of above Equation,
V (s)
V (s) / R = - s C V (s) - O
in 1 f O R
f
1
= - V (s) [s C + ]
O f R
f
[1+ s C R ]
= - V (s) f f
O R
f
R
V (s) = - f V (s)
O R [1+ s R C ] in
1 f f
1
V (s) = - V (s)
O R in
sR C + 1
1 f R
f
When R is very large than R / R can be neglected and hence circuit behaves like
f 1 f
an ideal integrator as
1
V (s) = - V (s)
O sR C in
1 f
1
VO (t) = - ∫ Vin (t) dt --------- as 1/s = ∫ dt
sR1 Cf
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
15
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Circuit Diagram for Integrator:
Design: R1 = 1K, C=1µF and f = 1KHZ
T = 1/f
f=1/2∏ R1Cf
VO = Vin ×T / (R1×C1) = 1.6K
R eq = R1*Rf / (R1 +Rf) = 1.6×10 6/2.6×103 = 615Ω
Model Graph:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
16
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the linear operational amplifier circuits were designed, constructed and its
performance was tested using op-amp IC 741.
Circuit Diagram for Astable Multivibrator Using Op-amp:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
17
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
R2
R = R = R = 6.8KΩ C = 0.01μf β = = 0.5
1 2 R1 + R2
1+β 1
T = 2RC ln = 0.15ms Frequency(f) = = 6.7KHz
1-β T
Model Graph:
EXP. NO :2
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
18
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : MULTIVIBRATOR CIRCUITS USING OPERATIONAL AMPLIFIER
---------------------------------------------------------------------------------------------------
Aim:
To design, construct and test the performance of astable and monostable
multivibrators using operational amplifier.
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
7 Signal generator
Theory:
Astable Multivibrator:
Astable Multivibrator is a square wave generator. A simple op-amp
square wave generator is also called a free running generator. The principle of
generation of square wave output is to force an op-amp to operate in saturation region.
β = R2 / (R1+R2) of output is feedback to the positive input terminal. Thus the reference
voltage VR is β VO and may takes value as +β Vsat or -β Vsat. The output is also feedback
to the negative input terminal. After interchanging by means of the low pass RC
combination whenever input at negative input terminal slightly exceeds reference
voltage then switching takes place resulting in square wave output in astable
multivibrator both states are quasi states.
Procedure:
1. Make the connections as per the circuit diagram.
2. Switch on the regulated power supply and observe the output in CRO.
3. Calculate the output frequency and verify it with the theoretical frequency
obtained from the design steps.
4. Draw the graph for output.
Circuit Diagram for Monostable Multivibrator Using Op-amp:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
19
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Model Graph:
Monostable Multivibrator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
20
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
In monostable multivibrator the diode D 1 is connected across
the capacitor(C). The diode clamps the capacitor voltage to 0.7V. When the output is at
+Vsat, narrow negative triggering pulse Vt is applied to non inverting terminal through
diode D2. Let us assume the output voltage VO is at +Vsat in its stable state. The diode D1
conducts and the voltage across the capacitor(C) is VC gets clamped to 0.7V. The voltage
at non inverting input terminal is controlled by potentiometer divides of R1R2 to β VO. i.e.
+ β Vsat in stable state. If Vt is a negative trigger of amplitude so that effective voltage at
this terminal is less than 0.7V (+ β Vsat + (-Vt) then the output of the op-amp changes its
state from +Vsat to -Vsat. The diode is now reverse biased and the capacitor starts
charging exponentially to -Vsat through resistance R. The time constant of charging is
zero.
Procedure:
1. Make the connections as per the circuit diagram.
2. Using the function generator Apply the trigger input to the non inverting
input terminal of op-amp.
3. Measure the output from CRO.
4. Characteristics of Input, output versus time are drawn from the readings
observed in CRO.
Tabular Column: Astable Multivibrator
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
21
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Capacitor
Output Voltage
S.NO Voltage (VC) in Time in ms Time in ms
(VO) in volts
volts
Tabular Column: Monostable Multivibrator
Time in ms
Input Voltage Output Voltage
S.NO
(Vi) in volts (VO) in volts
TON TOFF
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
22
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the astable and monostable multivibrator circuits were designed and tested
the performance using operational amplifier.
Circuit Diagram for Zero Crossing Detector:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
23
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Model Graph:
EXP. NO :3
DATE : APPLICATIONS OF COMPARATOR CIRCUITS
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
24
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
---------------------------------------------------------------------------------------------------
Aim:
To design, construct and test the performance of following applications of
comparator circuits using operational amplifier.
(1) Zero crossing detector (2) Window detectors (3) Schmitt Trigger
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Voltmeter
5 Breadboard
6 Connecting Wires
Theory:
Zero Crossing Detector:
The basic comparator can be used as a zero crossing detector. It answers the
questions: Is the input signal greater than or less than zero? A typical circuit for
inverting zero crossing detector is shown in figure with Vref = 0V. During the +ve half
cycle, the input voltage is positive i.e., above the reference voltage. Hence the output
voltage is - Vsat. During the –ve half cycle, the input voltage Vin is negative, i.e., below
the reference voltage. The output voltage is the +Vsat. Thus the output voltage switches
between -Vsat to +Vsat whenever the input signal crosses the zero level.
Window detector:
Window detector is a circuit which is used to mark the instant at which an
unknown input is between two threshold levels. The window detector circuit is shown in
the figure to display three level detections with indicator. Three indicators available in
the circuit are LED 3 for high input (Vi >10V), LED 2 for safe input (5V < Vi < 10V) and
LED 1 for low input (Vi <5V).
Procedure:
1. Make the connections as per the circuit diagram.
2. Set the input signal (Say 1V, 1 KHz) using signal generator.
3. Observe the input and output waveforms on the CRO.
4. Plot the graph for Vi versus time and VO versus time.
Circuit Diagram for Window Detector:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
25
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column:
Input Voltage OUTPUT DETECTIONS
S.No
(Vi) LED 1 LED 2 LED 3
1 Vi <5V ON OFF OFF
2 5V < Vi < 10V OFF ON OFF
3 Vi >10V OFF OFF ON
Schmitt Trigger:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
26
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
In Schmitt trigger circuit, the input voltage is applied to the negative
terminal of op-amp and resistor R is chosen equal to R 1||R2 to compensate the input bias
current. The input Vin trigger the output VO, every time it exceeds a certain voltage level
and these voltage levels are called upper threshold voltage and lower threshold voltage.
The hysteresis width is the difference between these two voltage levels.
Design:
R R
= V + 2 (Vsat - V ) - 2 (Vsat + V )
V
UT ref ref
V =V
LT ref ref
R1 +R2 R1 +R2
V =0 V R =100KΩ R = 10KΩ Vsat = 1V
ref 2 1
R
= V + 2 (Vsat - V ) = +0.9
V
UT ref ref
R1 +R2
R
- 2 (Vsat + V ) = -0.9
V =V
LT ref ref
R1 +R2
V = - V = 0.9 = -0.9
UT LT
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
27
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Circuit Diagram for Schmitt Trigger:
Tabular Column:
Input Voltage Output Voltage Threshold Voltage in Volts
S.No
(Vi) in volts (VO) in volts VUT VLT
Model Graph:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
28
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Threshold Voltage:
The threshold voltages are calculated as follows for the output VO = +Vsat, the
input voltage at the positive terminal is called as upper threshold voltage and given by
VUT = Vref + [{R2 / (R1+R2)} {+Vsat - Vref}].
As long as Vi is less than VUT, the output remains at +V sat and when Vi is slightly
greater than VUT, the output switches to -Vsat and remains at same level till Vi>VUT.
For the output VO = -Vsat, the input voltage at the +ve terminal is called lower
threshold voltage is given by,
VLT = Vref – [{R2 / (R1+R2)} {+Vsat - Vref}]
As long as Vi is less than VLT, the output remains at -Vsat and when Vi is slightly
greater than VLT, the output switches to +Vsat and remains at that level till Vi>VLT.
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the applications of comparator circuits were designed, constructed and
tested the performance using operational amplifier.
Circuit Diagram for 2nd order Butterworth Active Low Pass Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
29
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design of Low Pass Filter:
1. Select fH = 3 KHz
2. Set R2 = R3 = R and C2 = C3 = C =0.01μf (C is always ≤ 1μf).
3. Calculate R from f H = 1 / 2∏RC
R = 1 / 2∏ f H C = 5.3KΩ = R2 = R3
R
4. For Butterworth response AF = 1+ f = 1.586 ; R = (1.586 -1) R1
f
R1
5. Choose R1=10 KΩ then Rf = 5.86 KΩ
Model Graph:
EXP. NO :4
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
30
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : ACTIVE FILTERS USING OP-AMP
---------------------------------------------------------------------------------------------------
Aim:
To design, construct and obtain the frequency response of following active filters
using operational amplifiers
(1) Low pass filter (2) High pass filter (3) Band pass filter (4) Band Stop filter
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
7 Signal Generator
Theory:
Low Pass Filter:
The practical response of the filter must be very close to an ideal one. In
case of low pass filter, it is always desirable that the gain rolls off very fast after the cut
off frequency, in the stop band. In case of first order filter, it rolls off at a rate of 20 dB/
decade. In case of second order filter the gain rolls of at a rate of 40dB / decade. Thus
the slope of the frequency response after f=fH is -40dB / decade, for a second order low
pass filter. The first order filter can be converted to second order type by using an
additional RC network. The gain of the second order filter is determined by R 1 and Rf.
The fH is designed by R2, C2, R3, and C3 as follows.
1
f = . For a second order low pass Butterworth filter,
H 2π R R C C
2 3 2 3
the voltage gain magnitude equation is
Vo AF Rf
=
Vin 4 Where AF = 1+ Pass band gain of the filter
f
1+
f H R1
1
f = --High Cutoff frequency in Hz and F=Input Frequency (Hz)
H 2π R R C C
2 3 2 3
Circuit Diagram for 2nd order Butterworth Active High Pass Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
31
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design of High Pass Filter:
1. Select fL = 3 KHz
2. Set R2 = R3 = R and C2 = C3 = C =0.01μf (C is always ≤ 1μf).
3. Calculate R from f L = 1 / 2∏RC
R = 1 / 2∏ f L C = 5.3KΩ = R2 = R3
R
4. For Butterworth response AF = 1+ f = 1.586 ; R = (1.586 -1) R1
f
R1
5. Choose R1=10 KΩ then Rf = 5.86 KΩ
Model Graph:
Procedure:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
32
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
1. Make the connections as per the circuit diagram.
2. Vary the frequency of input signal and note the corresponding output
voltage.
3. Calculate the gain and draw the graph.
4. Find the cut off frequency.
Tabular Column: Low Pass Filter
Vin =
Output Voltage (VO) Gain = 20 log
S.No Frequency in Hz
in Volts (VO/Vin) dB.
Circuit Diagram for 2nd order Butterworth Wide Band Pass Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
33
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design of Wide Band Pass Filter:
1. Select f L = 3 KHz and f H = 10 KHz.
2. Choose C1 = C2 = 0.01μf.
3. f L = 1 / 2∏ R2 C2 then R2 =1 / 2∏ f L C2 = 5.3KΩ
4. f H = 1 / 2∏ R1 C1 then R1 =1 / 2∏ f H C1 = 1.6KΩ
5. Band Width= f H - f L
MODEL GRAPH:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
34
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
High Pass Filter:
A second order high pass filter can be obtained from a second order low
pass filter simply by interchanging the frequency determining resistors and capacitors.
The Voltage gain magnitude of the second order high pass filter is given by
Vo AF
=
Vin 4
f
1+ L
f
Where AF = 1.586 – Pass band gain; fL = Low cutoff frequency and f= frequency of the
input signal
1
f =
L 2π R R C C
2 3 2 3
Since second order low pass and high pass filters are alike except that the positions of
resistors and capacitors are being interchanged, the design and frequency scaling
procedures are same for high pass filter as those for the low pass filter.
Tabular Column: High Pass Filter
Vin =
Output Voltage (VO) Gain = 20 log
S.No Frequency in Hz
in Volts (VO/Vin) dB.
Circuit Diagram for 2nd order Butterworth Wide Band Stop Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
35
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design of Wide Band Stop Filter:
1. Select f L = 10 KHz and f H = 3 KHz.
2. Choose C1 = C2 = 0.01μf.
3. f L = 1 / 2∏ R2 C2 then R2 =1 / 2∏ f L C2 = 1.6KΩ
4. f H = 1 / 2∏ R1 C1 then R1 =1 / 2∏ f H C1 = 5.3KΩ
Model Graph:
Band Pass Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
36
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Band Pass Filter is a frequency selective circuit that passes signal of
specified band of frequency and alternates the frequencies outside the band. There are
two types of band pass filter namely wide band pass and narrow band pass. A wide band
pass filter can be formed by cascading a high pass and low pass filter sections with f H>fL
where function is the corner frequency of low pass and f L is high pass filter. A band pass
filter has the pass band between two cut off frequencies fH – fL.
Procedure:
1. Make the connections as per the circuit diagram.
2. The input voltage is set to the constant value say 2V.
3. Vary the frequency of input signal and note the corresponding output
voltage.
4. Calculate the gain and draw the graph.
5. Find the cut off frequencies.
Tabular Column: Band Pass Filter
Vin =
Output Voltage (VO) Gain = 20 log
S.No Frequency in Hz
in Volts (VO/Vin) dB.
Band Stop Filter:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
37
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Band stop filter attenuates frequencies in the stop band and passes them outside
the band. The other names given for Band stop filter are Band – reject filter and Band –
elimination filter. The band stop filter can be classified as wide band stop and narrow
band stop filters. In lab class, we are going to design a Wide Band Stop filter.
Wide Band Stop filter:
A wide band stop filter consists of a low pass filter, a high pass filter and a
summing amplifier. The lower cut off frequency f L of the high pass filter must be greater
than the higher cutoff frequency f H of the low pass filter. It is to be noted that the pass
band gain of both the high pass and low pass filters must be equal.
Tabular Column: Band Stop Filter
Vin =
Output Voltage (VO) Gain = 20 log
S.No Frequency in Hz
in Volts (VO/Vin) dB.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
38
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the active filter circuits were designed constructed and tested the
performance using operational amplifier and cut off frequencies were found.
Circuit Diagram for Astable Multivibrator Using IC 555:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
39
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
RA = 1K, RB = 2.2 K and C = 0.01μf
1 1.45
f = =
O T (R A + 2 RB )C = 26.85 KHz
R A + RB
% Duty Cycle = ×100 = 59.25%
R A + 2 RB
Model Graph:
EXP. NO :5
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
40
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : MULTIVIBRATOR CIRCUITS USING IC 555 TIMER
----------------------------------------------------------------------------------------------
Aim:
To design, construct and obtain the frequency response and test performance of
astable and monostable multivibrator using IC 555 timer.
Components Required:
S. No Component Name Range Type Quantity
1 Timer IC
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
7 Signal Generator
Theory:
Astable Multivibrator:
Comparing with monostable operation timing resistor is split into
two sections RA and RB. Pin 7, discharging transistor Q1 is connected to the junction of RA
and RB. When the power supply VCC is connected, the external timing capacitor C charges
towards VCC with the time constant (RA+RB) C. During this time output (pin 3) is high as
Reset R=0, S=1 and this combination makes Q’ = 0 which has unclamped timing
capacitor C.
When the capacitor voltage equals 2/3 VCC, upper comparator triggers the control
flip-flop so that Q’ = 1. This turns make transistor Q1 ON and capacitor C starts
discharging towards ground through RB and a transistor Q1 with a time constant RBC and
current also flowing through RA. Resistor RA and RB must be large enough to limit this
current and prevent damage to discharge transistor Q1. From the figure, we can observe
that the capacitor is periodically charged and discharged between 2/3 VCC and 1/3 VCC
respectively. The required between the capacitor charges from 1/3 VCC to 2/3 VCC is given
by (Output High)
t C = 0.69 (R A+R B) C = TON
The time during which the capacitor discharges from 2/3 VCC to 1/3 VCC is equal to
(Output Low)
t d =0.69 (R B) C = TOFF
Circuit Diagram for Monostable Multivibrator Using IC 555:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
41
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
Pulse Width (TP) = 1.1 R C = 1.1×100×10 3×100×10 -6 = 11 Seconds
Model Graph:
The total period of the waveform is,
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
42
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
T=t + t = 0.69(R + 2 R )C ---------- T = TON + TOFF
C d A B
The frequency of Oscillation is,
1 1.45
f = =
O T (R A + 2 RB )C
The duty cycle is the ratio of the time t C during which the output is high to the total
period T. It is given by
t
% Duty Cycle = C ×100
T
R A + RB
= ×100
R A + 2 RB
Monostable Multivibrator:
A 555 timer is connected for monostable operation and its
functional diagram. In the stand by state, FF holds transistor Q1 ON, thus clamping the
external trigger timing capacitor C to ground. The output remains at the ground potential
i.e low. As the trigger passes through VCC/3, FF is set Q’=0. This makes the transistor Q1
OFF and the short circuit across the timing capacitor C is relaxed. As Q’ is low, output
goes high i.e equal to VCC. The timing cycle now begins. Since C is unclamped, Voltage
across it exponentially through R towards VCC with a time constant RC. After a time
period T, the capacitor voltage is slightly greater than (2/3) VCC and the upper
comparator resets the FF that is R1=0, S=0. This makes Q’=1 transistor Q1 goes on there
by discharging the capacitor C rapidly to ground potential. The output returns to the
stand by state on ground potential. It is evident from that the timing interval is
independent of supply voltage. It may also be noted that once triggered, the output
remain in HIGH state until time T.
TP = 1.1 R C Seconds
Procedure:
1. Make the connections as per the circuit diagram.
2. Switch ON the Dual power supply observe the output on CRO.
3. Calculate the output frequency from CRO and verify it with frequency
calculated theoretically.
4. Follow the above steps for both Astable and Monostable Multivibrator.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
43
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column: Astable Multivibrator:
Capacitor Time in ms
Output Voltage Frequency in
S.No Voltage (VC) in Time in ms
(VO) in volts TON TOFF Hz
volts
Tabular Column: Monostable Multivibrator
Capacitor
Output Voltage Frequency in
S.No Voltage (VC) in Time in sec Time in sec
(VO) in volts Hz
volts
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
44
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the multivibrator circuits using 555 timer were designed constructed and
tested the performance using 555 timer.
Circuit Diagram for RC Phase Shift Oscillator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
45
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
f = 1 KHz, C = 0.01μf (Std. Value), R1 = 2.2K and Rf = 29 R1 = 29×2.2K = 63.8K
1 1
f= R = 2π f C 6 = 6.5KΩ
2π R C 6
Rf 63.8K Rf
A ≥ 29 = ≥ 29 = = 29 (Condition ≥ 29 was satisfied)
R1 2.2K R1
Tabular Column:
Output Voltage Designed Observed
S.No Time in ms
(VO) in Volts Frequency Frequency
Model Graph:
EXP. NO :6
DATE : OSCILLATORS USING OPERATIONAL AMPLIFIER
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
46
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
----------------------------------------------------------------------------------------------
Aim:
To design, construct and test the performance of RC phase shift oscillator and
Wien bridge oscillator using operational amplifiers.
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
7 Signal Generator
Theory:
RC Phase Shift Oscillator:
1 1
β= ; Condition for Oscillation = A β ≥ 1 A β ≥1 A ≥ β A ≥ 29
29
RC phase shift oscillator which uses a common emitter single stage amplifier and
phase shifting network consists of the identical RC sections. The output of the feedback
network gets loaded to the low output impedance of transistor. Hence an emitter follows
input stage before the common emitter amplifier stage can be used to avoid the problem
of the low input impedance. A phase shifting network is feedback network, so output of
the amplifier is given as an input to the feedback is given as an input to the amplifier.
Practically the resistance Rf of the inverting amplifier is designed by, by making current
through it, much larger than input bias current of the op-amp. Let the current through Rf
is I1 then,
I1 = 100 Ib (max)
Without amplitude stabilization, the output of the oscillator oscillates between the levels
±Vsat. VO = +VO (sat); Rf = - VO (sat) / I1 -- [+VO (sat) can be assumed 1Volt < VCC]
1 R
Now, ACL ≥
29
R f ≥ 29 .Design the value of R1 from gain requirement. To
1
prevent loading of the amplifier because RC networks, it is necessary that R1 ≥ 10 R.
1
R = R1 / 10; Now C= gives required value of capacitor.
2π f R 6
Circuit Diagram for Wien Bridge Oscillator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
47
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Design:
f = 5 KHz, Rf = 10K, R1=3.3K and C = 0.01μf (Std. Value)
1 1
f= R = 2π f C = 3.2K (Use Std. Value 3.3K)
2π R C
Rf 10K
A ≥ 3 = 1+ R ≥ 3 = 1+ ≥ 3 A=4(Barkhausen criterion was satisfied (A≥3))
1 3.3K
Tabular Column:
Output Voltage Designed Observed
S.No Time in ms
(VO) in Volts Frequency Frequency
Model Graph:
Wien Bridge Oscillator:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
48
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
A basic Wien bridge is used in this stage as amplifier. The output of amplifier is
applied between terminal 1 and 3, which is input of feedback network. While amplifier
input is applied from diagonal terminals 2 and 4, which is the output from the feedback
network. Thus two arms of the bridge namely R 1C1 in series and R2C2 in parallel are
called frequency sensitive arms. Because of components of these two arms decides the
frequency of oscillation. Let us find out the gain of the feedback network. As seen earlier
input Vin to the feedback network is between 1 and 3 while output V f of the feedback
network is between 2 and 4. Such a feedback network called lead-lag network. This is
because at very low frequency it acts like a lead while at very high frequency it acts like
a lag. Another important advantage of Wien bridge oscillator on varying the two
capacitors simultaneously by mounting them on the common shaft, different frequency
range can be provided. To satisfy Barkhausen criterion that A β ≥ 1. It is necessary that
the gain of the non inverting op-amp amplifier must be minimum 3.
R Rf
ACL ≥ 3 1+ f ≥ 3 ≥2
R1 R1
1
The frequency of Oscillation is given by f =
2π R C
Procedure:
1. Make the connections as per the circuit diagram.
2. Supply Voltage is set as 12V using Dual power supply.
3. Calculate output voltage and time (ms) for both RC phase shift oscillator
and Wien bridge oscillator.
4. Draw the graph between output voltage and time.
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the RC phase shift oscillator and Wien bridge oscillator using operational
were designed, constructed and performance was verified.
Circuit Diagram for Weighted Resistor DAC:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
49
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Circuit Diagram for R-2R Ladder DAC:
Model Graph:
EXP. NO :7
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
50
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : DIGITAL TO ANALOG CONVERTERS USING OP-AMP
----------------------------------------------------------------------------------------------
Aim:
To design and construct a digital input into analog output converters using
operational amplifier.
Components Required:
S. No Component Name Range Type Quantity
1 Op-amp
2 Power Supply
3 Resistor
4 Voltmeter
5 Breadboard
6 Connecting Wires
Theory:
Weighted Resistor DAC:
The weighted resistor DAC consists of a summing amplifier with binary weighted
resistor network as shown in the circuit diagram. When the binary input is ‘1’ then it
connects the resistance to the reference voltage (-VR). If the input is ‘0’ resistor
connected to the ground. The output of the op-amp is given as
I = I + I +.......+ In
0 1 2
V V V
I = R d + R d +...........+ nR dn
0 2R 1 2 2 2 R
2 R
V -1 -2 -n
I = R (d 2 + d 2 +........+ dn 2 )
0 R 1 2
The output voltage,
R
V =I R =V f (d 2-1 + d 2-2 +........+ d 2-n )
0 0 f R R 1 2 n
The circuit uses a negative reference voltage. We observe positive staircase for
analog output voltage. It can be observed that,
1. The op-amp functions as a current to voltage converter.
2. Although the op-amp is connected in inverting mode, it can also be
possible to connect in non-inverting mode.
3. The polarity of the reference voltage is selected in accordance with the
position of the switch. (Resistor Value)
R – 2R Ladder Network:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
51
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
The binary weighted resistor type DAC needs wide range of resistors. It can be
avoided by using R – 2R ladder type DAC. It uses only two values of resistors. It is
highly suited for IC technology. The circuit diagram of R – 2R ladder DAC is shown in
figure.
If the binary input data is 0001, then the output VO is equal to VR/16.
Tabular Column:
Binary Data Analog Output in Volts
S.No
D3 D2 D1 D0 R – 2R Ladder DAC Weighted DAC
1 0 0 0 0
2 0 0 0 1
3 0 0 1 0
4 0 0 1 1
5 0 1 0 0
6 0 1 0 1
7 0 1 1 0
8 0 1 1 1
9 1 0 0 0
10 1 0 0 1
11 1 0 1 0
12 1 0 1 1
13 1 1 0 0
14 1 1 0 1
15 1 1 1 0
16 1 1 1
Procedure:
1. Make the connections as per the circuit diagram.
2. Apply the four bit binary data to the resistive network and obtain the equivalent
analog output.
3. Draw the graph between digital input versus analog output
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
52
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the Digital to Analog Converter circuits were designed, constructed and
verified its performance using operational amplifier.
Circuit Diagram for Low Voltage Regulation Using IC 723:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
53
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column:
Load Regulation (Vin = 10V) Line Regulation (RL = 5KΩ)
S.No Output Voltage (VO) in Input Voltage Output Voltage
RL in KΩ
Volts (Vin) in Volts (VO) in Volts
Model graph:
EXP. NO :8
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
54
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : STUDY OF VOLTAGE REGULATOR USING IC LM 723
----------------------------------------------------------------------------------------------
Aim:
To design, construct and test the performance of low voltage and high voltage
regulation using IC LM 723.
Components Required:
S. No Component Name Range Type Quantity
1 Regulator IC
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
Theory:
Initially the output voltage is high capacitor starts charging towards V C through RA
and RB. As soon as capacitor higher than flip-flop and output switches low. Now capacitor
starts discharging through RB and transistor Q1. When the voltage across C equal to
VEVCC, lower than comparator output triggers the flip-flop and discharged between
(2/3)*VCC and VEVCC. The time duration which the capacitor charges VEVCC to (2/3)*VCC is
equal to the time output. With the advent of micro electronics, it is to incorporate the
complete circuit. This gives low cost high reliability, reduction in size and excellent
performance. Examples of monolithic regulators are 78XX / 79XX and 723 general
purpose regulators.
Line Regulation is defined as the % change in output voltage for a change in input
voltage. It is usually expressed in milli-volts or as a % of the output voltage.
Load Regulation is defined as the % change in output voltage for a change in load
current and is also expressed in milli-volts or as a % of the output voltage.
Procedure:
1. Make the connections as per the circuit diagram.
2. Set the input voltage Vin and calculate the output voltage by varying load
resistance for load regulation.
3. Set the load resistance RL=5K and calculate the output voltage by varying
input voltage for line regulation.
4. Plot the graph between Vout versus load resistance for load regulation and
Vout versus Vin for line regulation.
Circuit Diagram for High Voltage Regulation using IC 723:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
55
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column:
Load Regulation (Vin = 10V) Line Regulation (RL = 5KΩ)
S.No Output Voltage (VO) in Input Voltage Output Voltage
RL in KΩ
Volts (Vin) in Volts (VO) in Volts
Model graph:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
56
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the Low voltage and High voltage regulation using LM 723 was performed
and its line and load regulation characteristics were drawn.
Circuit Diagram of Sample and Hold:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
57
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Logic Diagram of Sample and Hold IC:
Pin Details of Sample and Hold IC:
EXP. NO :9
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
58
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DATE : SAMPLE AND HOLD CIRCUITS
----------------------------------------------------------------------------------------------
Aim:
To design, construct a Sample and Hold circuit and verify its performance with LF
398 IC.
Components required:
S. No Component Name Range Type Quantity
1 Sample and Hold IC
2 Power Supply
3 Resistor
4 Capacitor
5 Voltmeter
6 Breadboard
Theory:
In sample and The LF398 is a monolithic sample-and-hold circuit which utilizes
high-voltage on-implant JFET technology to obtain ultra-high DC accuracy with fast
acquisition of signal and low droop rate. Operating as a unity gain follower, DC gain
accuracy is 0.002% typical and acquisition time is as low as 6 ms to 0.01%.
Model Graph:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
59
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
A bipolar input stage is used to achieve low offset voltage and wide bandwidth.
Input offset adjust is accomplished with a single pin and does not degrade input offset
drift. The wide bandwidth allows the LF398 to be included inside the feedback loop of 1
MHz op amps without having stability problems. Input impedance of 1010W allows high
source impedances to be used without degrading accuracy. P-channel junction FET’s are
combined with bipolar devices in the output amplifier to give droop rates as low as 5 mV
per minute with a 1 mF hold capacitor. The JFET’s have much lower noise than MOS
devices used in previous designs and do not exhibit high temperature instabilities.
The overall design guarantees no feed through from input to output in the hold
mode even for input signals equal to the supply voltages. Logic inputs are fully
differential with low input current, allowing direct connection to TTL, PMOS, and CMOS;
differential threshold is 1.4 V. The LF398 will operate from ±5 V to ±18 V supplies. It is
available in 8-pin plastic DIP and 14-pin plastic SO packages.
FEATURES
Operates from ±5 V to ±18 V supplies
Less than 10 μs acquisition time
TTL, PMOS, CMOS compatible logic input
0.5 mV typical hold step at CH = 0.01 μF
Low input offset
0.002% gain accuracy
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
60
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Low output noise in hold mode
Input characteristics do not change during hold mode
High supply rejection ratio in sample or hold
Wide bandwidth
Procedure:
1. Make the connection as per the circuit diagram.
2. Apply the analog input to the sample and Hold Circuit and determine the
parameters of sample and Hold operation.
3. Draw the graph by using parameters obtained.
Performance Parameters of S/H Circuits:
Acquisition Time (t ):
ac
It is the time required for the holding capacitor CH to charge up to a level
close to the input voltage during sampling. It depends on three factors:
• RC time constant
• Maximum output current of op-amp
• Slew rate of op-amp
Aperture Time (t ap)
Because of propagation delays through the driver and switch, VO will keep
tracking Vi some time after the inception of the hold command. This is the aperture time.
To get the precise timing, it is necessary to advance hold command by this amount.
Aperture Uncertainty (Δ t ap):
It is the variation in aperture time from sample to sample. Due to aperture
uncertainty it is difficult to compensate aperture time by advancing hold Command.
Hold Mode settling time (t S):
After the application of hold command, it takes a certain amount of time
for VO to settle within a specified error band, such as 1%, 0.1% or 0.01%.
Hold Step:
The change in output voltage is referred as Hold step = ΔVO= ΔQ / CH
Voltage Droop:
The leakage current causes voltage of the capacitor to drop down is known as droop.
Feedthrough:
In the Hold mode, because of stray capacitance across the switch, there is
a small amount of ac coupling between VO and Vi. This ac coupling causes output voltage
to vary with variation in the input voltage. This is referred as Feedthrough.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
61
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the Low voltage and High voltage regulation using LM 723 was performed
and its line and load regulation characteristics were drawn.
Circuit Diagram for Analog Divider:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
62
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
10(Z2 - Z1 )
Divider Output = V = + Y1
O
X1 - X2
Circuit Diagram for Analog Square Rooter:
Square Rooter Output = V = 10(Z - Z ) + X
O 2 1 2
EXP. NO : 10
DATE :
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
63
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
ANALOG MULTIPLIER AS DIVIDER, SQUARER AND SQUARE ROOTER
---------------------------------------------------------------------------------------------
Aim:
To design, construct and test a analog Multiplier as divider, squarer and square
rooter.
Components required:
S. No Component Name Range Type Quantity
1 Multiplier IC
2 Power Supply
3 Resistor
4 Voltmeter
5 Breadboard
6 Connecting Wires
Theory:
The AD534 is a monolithic laser trimmed four-quadrant multiplier divider having
accuracy specifications previously found only in expensive hybrid or modular products. A
maximum multiplication error of ±0.25% is guaranteed for the AD534L without any
external trimming. Excellent supply rejection, low temperature coefficients and long term
stability of the on-chip thin film resistors and buried Zener reference preserve accuracy
even under adverse conditions of use. It is the first multiplier to offer fully differential,
high impedance operation on all inputs, including the Z-input, a feature which greatly
increases its flexibility and ease of use. The scale factor is pre-trimmed to the standard
value of 10.00 V; by means of an external resistor, this can be reduced to values as low
as 3 V. The wide spectrum of applications and the availability of several grades
commend this multiplier as the first choice for all new designs. The AD534 is the first
general purpose multiplier capable of providing gains up to X100, frequently eliminating
the need for separate instrumentation amplifiers to precondition the inputs. The AD534
can be very effectively employed as a variable gain differential input amplifier with high
common-mode rejection. The gain option is available in all modes, and will be found to
simplify the implementation of many function-fitting algorithms such as those used to
generate sine and tangent. The utility of this feature is enhanced by the inherent low
noise of the AD534: 90 mV, RMS (depending on the gain), a factor of 10 lower than
previous monolithic multipliers. Drift and feed through are also substantially reduced
over earlier designs.
Circuit Diagram for Analog Squarer:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
64
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
SF = Noise Spectral Density = 10V
A = open loop gain of output amplifier, typically 70 dB at DC
(X1 - X2 ) (Y1 - Y2 )
Vout = A - (Z - Z )
1 2
SF
sub (X1 = Y1 ) and (X2 = Y2 ), then
(X - X )2
Vout = A 1 2 - (Z - Z )
1 2
SF
FUNCTIONAL DESCRIPTION
BLOCK DIAGRAM OF AD 534
The functional block diagram of the AD534 is shown in figure. Inputs are
converted to differential currents by three identical voltages to current converters, each
trimmed for zero offset. The product of the X and Y currents is generated by a multiplier
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
65
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
cell using Gilbert’s trans-linear technique. An on-chip “Buried Zener” provides a highly
stable reference, which is laser trimmed to provide an overall scale factor of 10 V. The
difference between XY/SF and Z is then applied to the high gain output amplifier. This
permits various closed loop configurations and dramatically reduces nonlinearities due to
the input amplifiers, a dominant source of distortion in earlier designs. The effectiveness
of the new scheme can be judged from the fact that under typical conditions as a
multiplier the nonlinearity on the Y input, with X at full scale (±10 V), is ±0.005% of FS;
even at its worst point, which occurs when X = ±6.4 V, it is typically only ±0.05% of FS
Nonlinearity for signals applied to the X input, on the other hand, is determined almost
entirely by the multiplier element and is parabolic in form. This error is a major factor in
determining the overall accuracy of the unit and hence is closely related to the device
grade. The generalized transfer function for the AD534 is given by:
(X1 - X2 ) (Y1 - Y2 )
Vout = A - (Z - Z )
1 2
SF
Where A = open loop gain of output amplifier, typically 70 dB at DC
X, Y, Z = input voltages (full scale = ±SF, peak =±1.25 SF)
SF = scale factor, pre-trimmed to 10.00 V but adjustable by the user down to 3 V.
In most cases the open loop gain can be regarded as infinite, and SF will be 10 V. The
operation performed by the AD534, can then be described in terms of equation:
(X1 - X2)(Y1 -Y2) = 10V (Z1 - Z2)
The user may adjust SF for values between 10.00 V and 3 V by connecting an
external resistor in series with a potentiometer between SF and –VS. The approximate
value of the total resistance for a given value of SF is given by the relationship:
SF
R SF = 5.4K
10 - SF
Tabular Column:
DIVIDER
APPLICATIONS INPUTS Output
USING AD 534
MULTIPLIER X1 X2 Y1 Y2 Z1 Z2 VO
DIVIDER
SQUARER
APPLICATIONS INPUTS Output
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
66
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
USING AD 534
X1 X2 Y1 Y2 Z1 Z2 VO
MULTIPLIER
SQUARER
SQUARE ROOTER
APPLICATIONS INPUTS Output
USING AD 534
MULTIPLIER X1 X2 Y1 Y2 Z1 Z2 VO
SQUARE ROOTER
Due to device tolerances, allowance should be made to vary RSF; by ±25% using
the potentiometer. Considerable reduction in bias currents, noise and drift can be
achieved by decreasing SF. This has the overall effect of increasing signal gain without
the customary increase in noise. Note that the peak input signal is always limited to 1.25
SF (i.e., ±5 V for SF = 4 V) so the overall transfer function will show a maximum gain of
1.25. The performance with small input signals, however, is improved by using a lower
SF since the dynamic range of the inputs is now fully utilized. Bandwidth is unaffected by
the use of this option. Supply voltages of ±15 V are generally assumed. However,
satisfactory operation is possible down to ±8 V. Since all inputs maintain a constant
peak input capability of ±1.25 SF some feedback attenuation will be necessary to
achieve output voltage swings in excess of ±12 V when using higher supply voltages.
OPERATION AS A MULTIPLIER
Diagram shows the basic connection for multiplication. Note that the circuit will
meet all specifications without trimming. In some cases the user may wish to reduce ac
feed through to a minimum by applying an external trim voltage (±30 mV range
required) to the X or Y input. Figure 19 shows the typical ac feed through with this
adjustment mode. Note that the Y input is a factor of 10 lower than the X input and
should be used in applications where null suppression is critical. The high impedance Z 2
terminal of the AD534 may be used to sum an additional signal into the output. In this
mode the output amplifier behaves as a voltage follower with a 1 MHz small signal
bandwidth and a 20 V/ms slew rate. This terminal should always be referenced to the
ground point of the driven system, particularly if this is remote. Likewise, the differential
inputs should be referenced to their respective ground potentials to realize the full
accuracy of the AD534.
OPERATION AS A DIVIDER
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
67
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
The Figure shows the connection required for division. Unlike earlier products, the
AD534 provides differential operation on both numerator and denominator, allowing the
ratio of two floating variables to be generated. Further flexibility results from access to a
high impedance summing input to Y1. As with all dividers based on the use of a multiplier
in a feedback loop, the bandwidth is proportional to the denominator magnitude. Without
additional trimming, the accuracy of the AD534K and L is sufficient to maintain a 1%
error over a 10 V to 1 V denominator range. This range may be extended to 100:1 by
simply reducing the X offset with an externally generated trim voltage (range required is
±3.5 mV max) applied to the unused X input (see Figure 1). To trim, apply a ramp of
+100 mV to +V at 100 Hz to both X1 and Z1 (if X2 is used for offset adjustment,
otherwise reverse the signal polarity) and adjust the trim voltage to minimize the
variation in the output. Since the output will be near +10 V, it should be ac-coupled for
this adjustment.
The increase in noise level and reduction in bandwidth preclude operation much
beyond a ratio of 100 to 1. As with the multiplier connection, overall gain can be
introduced by inserting a simple attenuator between the output and Y2 terminal. This
option and the differential-ratio capability of the AD534 are utilized in the percentage-
computer applications. This configuration generates an output proportional to the
percentage deviation of one variable (A) with respect to a reference variable (B), with a
scale of one volt per percent.
OPERATION AS A SQUARE ROOTER
The operation of the AD534 in the square root mode is shown in Figure. The
diode prevents a latching condition which could occur if the input momentarily changes
polarity. As shown, the output is always positive; it may be changed to a negative output
by reversing the diode direction and interchanging the X inputs. Since the signal input is
differential, all combinations of input and output polarities can be realized, but operation
is restricted to the one quadrant associated with each combination of inputs. In contrast
to earlier devices, which were intolerant of capacitive loads in the square root modes,
the AD534 is stable with all loads up to at least 1000 pF. For critical applications, a small
adjustment to the Z input offset will improve accuracy for inputs below 1 V.
OPERATION AS A SQUARER
Operation as a squarer is achieved in the same fashion as the multiplier except
that the X and Y inputs are used in parallel. The differential inputs can be used to
determine the output polarity (positive for X1 = Y1 and X2 = Y2, negative if either one of
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
68
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
the inputs is reversed). Accuracy in the squaring mode is typically a factor of 2 better
than in the multiplying mode, the largest errors occurring with small values of output for
input below 1 V. If the application depends on accurate operation for inputs that are
always less than ±3 V, the use of a reduced value of SF is recommended as described in
the Functional Description section. Alternatively, a feedback attenuator may be used to
raise the output level. This is put to use in the difference-of-squares application to
compensate for the factor of 2, loss involved in generating the sum term. The difference-
of-squares function is also used as the basis for a novel RMS-to-dc converter. The
averaging filter is a true integrator, and the loop seeks to zero its input. For this to
occur, (VIN)2 – (VOUT)2 = 0 (for signals whose period is well below the averaging time-
constant). Hence VOUT is forced to equal the RMS value of V IN. The absolute accuracy of
this technique is very high; at medium frequencies, and for signals near full scale, it is
determined almost entirely by the ratio of the resistors in the inverting amplifier. The
multiplier scaling voltage affects only open loop gain. The data shown is typical of
performance that can be achieved with an AD534K, but even using an AD534J, this
technique can readily provide better than 1% accuracy over a wide frequency range,
even for crest-factors in excess of 10.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
69
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the Analog multiplier as divider, squarer and square rooter circuits were
designed, constructed and tested using analog multiplier IC - AD 534.
Pin Diagram of AD 573 IC:
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
70
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Tabular Column:
MSB Equivalent Digital Output LSB
Analog Input
in Volts DB DB DB DB DB DB DB DB DB DB
9 8 7 6 5 4 3 2 1 0
EXP. NO : 11
DATE : SUCCESSIVE APPROXIMATION ANALOG TO DIGITAL CONVERTER
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
71
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
----------------------------------------------------------------------------------------------
Aim:
To design, construct and test the performance of successive approximation
analog to digital converter – AD 573 IC.
Components Required:
S. No Component Name Range Type Quantity
Analog to Digital
1
Converter IC
2 Power Supply
3 Resistor
4 Breadboard
5 Connecting Wires
Theory:
FUNCTIONAL DESCRIPTION
A block diagram of the AD573 is shown in Figure 1. The positive CONVERT pulse
must be at least 500 ns wide. DR goes high within 1.5 ms after the leading edge of the
convert pulse indicating that the internal logic has been reset. The negative edge of the
CONVERT pulse initiates the conversion. The internal 10-bit current output DAC is
sequenced by the integrated injection logic (I2L) successive approximation register (SAR)
from its most significant bit to least significant bit to provide an output current which
accurately balances the input signal current through the 5 kW resistor. The comparator
determines whether the addition of each successively weighted bit current causes the
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
72
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
DAC current sum to be greater or less than the input current; if the sum is more, the bit
is turned off. After testing all bits, the SAR contains a 10-bit binary code which
accurately represents the input signal to within 1/2 LSB (0.05% of full scale).
The SAR drives DR Low to indicate that the conversion is complete and that the
data is available to the output buffers. HBE and LBE can then be activated to enable the
upper 8-bit and lower 2-bit buffers as desired. HBE and LBE should be brought high prior
to the next conversion to place the output buffers in the high impedance state. The
temperature compensated buried Zener reference provides the primary voltage
reference to the DAC and ensures excellent stability with both time and temperature.
The bipolar offset input controls a switch which allows the positive bipolar offset current
(exactly equal to the value of the MSB less 1/2 LSB) to be injected into the summing (+)
node of the comparator to offset the DAC output. Thus the nominal 0 V to +10 V
Unipolar input range becomes a –5 V to +5 V range. The 5 kW thin-film input resistor is
trimmed so that with a full-scale input signal, an input current will be generated which
exactly matches the DAC output with all bits on.
UNIPOLAR CONNECTION
The AD573 contains all the active components required to perform a complete
A/D conversion. Thus, for many applications, all that is necessary is connection of the
power supplies (+5 V and –12 V to –15 V), the analog input and the convert pulse.
However, there are some features and special connections which should be considered
for achieving optimum performance. The functional pin out is shown in Figure 2. The
standard Unipolar 0 V to +10 V range is obtained by shorting the bipolar offset control
pin (Pin 16) to digital common (Pin 17).
Full-Scale Calibration
The 5 kW thin-film input resistors is laser trimmed to produce a current which
matches the full-scale current of the internal DAC—plus about 0.3%—when an analog
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
73
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
input voltage of 9.990 volts (10 volts – 1 LSB) is applied at the input. The input resistor
is trimmed in this way so that if a fine trimming potentiometer is inserted in series with
the input signal, the input current at the full-scale input voltage can be trimmed down to
match the DAC full-scale current as precisely as desired. However, for many applications
the nominal 9.99 volt full scale can be achieved to sufficient accuracy by simply inserting
a 15 W resistor in series with the analog input to Pin 14. Typical full-scale calibration
error will then be within ±2 LSB or ±0.2%. If more precise calibration is desired, a 50 W
trimmer should be used instead. Set the analog input at 9.990 volts, and set the trimmer
so that the output code is just at the transition between 11111111 10 and 11111111 11.
Each LSB will then have a weight of 9.766 mV. If a nominal full scale of 10.24 volts is
desired (which makes the LSB have a weight of exactly 10.00 mV), a 100 W resistor and
a 100 W trimmer (or a 200 W trimmer with good resolution) should be used. Of course,
larger full-scale ranges can be arranged by using a larger input resistor, but linearity and
full-scale temperature coefficient may be compromised if the external resistor becomes a
sizeable percentage of 5 kW. Figure 3 illustrates the connections required for full-scale
calibration.
Unipolar Offset Calibration
Since the Unipolar Offset is less than ±1 LSB for all versions of the AD573, most
applications will not require trimming. Figure 4 illustrates two trimming methods which
can be used if greater accuracy is necessary. Figure 4a shows how the converter zero
may be offset by up to ±3 bits to correct the device initial offset and/or input signal
offsets. As shown, the circuit gives approximately symmetrical adjustment in unipolar
mode.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
74
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Figure 5 shows the nominal transfer curve near zero for an AD573 in Unipolar
mode. The code transitions are at the edges of the nominal bit weights. In some
applications it will be preferable to offset the code transitions so that they fall between
the nominal bit weights, as shown in the offset characteristics. This offset can easily be
accomplished as shown in Figure 4b. At balance (after a conversion) approximately 2 mA
flows into the Analog Common terminal.
A 2.7 W resistor in series with this terminal will result in approximately the
desired 1/2 bit offset of the transfer characteristics. The nominal 2 mA Analog Common
current is not closely controlled in manufacture. If high accuracy is required, a 5 W
potentiometer (connected as a rheostat) can be used as R1. Additional negative offset
range may be obtained by using larger values of R1. Of course, if the zero transition
point is changed, the full-scale transition point will also move. Thus, if an offset of 1/2
LSB is introduced; full-scale trimming as described on the previous page should be done
with an analog input of 9.985 volts.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
75
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
BIPOLAR CONNECTION
To obtain the bipolar –5 V to +5 V range with an offset binary output code, the
bipolar offset control pin is left open. A –5.000 volt signal will give a 10-bit code of
00000000 00; an input of 0.000 volts results in an output code of 10000000 00 and
+4.99 volts at the input yields the 11111111 11 code. The nominal transfer curve is
shown in Figure 6.
Note that, in the bipolar mode, the code transitions are offset 1/2 LSB such that
an input voltage of 0 volts ±5 mV yields the code representing zero (10000000 00).
Each output code is then centered on its nominal input voltage.
Full-Scale Calibration
Full-Scale Calibration is accomplished in the same manner as in unipolar
operation except the full scale input voltage is +4.985 volts.
Negative Full-Scale Calibration
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
76
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
The circuit in Figure 4a can also be used in bipolar operation to offset the input
voltage (nominally –5 V) which results in the 00000000 00 code. R2 should be omitted
to obtain a symmetrical range. The bipolar offset control input is not directly TTL
compatible but a TTL interface for logic control can be constructed as shown in Figure 7.
SAMPLE-HOLD AMPLIFIER CONNECTION TO THE AD573
Many situations in high speed acquisition systems or digitizing rapidly changing
signals require a sample-hold amplifier (SHA) in front of the A/D converter. The SHA can
acquire and hold a signal faster than the converter can perform a conversion. A SHA can
also be used to accurately define the exact point in time at which the signal is sampled.
For the AD573, a SHA can also serve as a high input impedance buffer. Figure 8 shows
the AD573 connected to the AD582 monolithic SHA for high speed signal acquisition. In
this configuration, the AD582 will acquire a 10 volt signal in less than 10 ms with a
droop rate less than 100 mV/ms.
DR goes high after the conversion is initiated to indicate that reset of the SAR is
complete. In Figure 8 it is also used to put the AD582 into the hold mode while the
AD573 begins its conversion cycle. (The AD582 settles to final value well in advance of
the first comparator decision inside the AD573). DR goes low when the conversion is
complete placing the AD582 back in the sample mode. Configured as shown in Figure 8,
the next conversion can be initiated after a 10 ms delay to allow for signal acquisition by
the AD582. Observe carefully the ground, supply, and bypass capacitor connections
between the two devices. This will minimize ground noise and interference during the
conversion cycle.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
77
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
GROUNDING CONSIDERATIONS
The AD573 provides separate Analog and Digital Common connections. The circuit
will operate properly with as much as ±200 mV of common-mode voltage between the
two commons. This permits more flexible control of system common bussing and digital
and analog returns. In normal operation, the Analog Common terminal may generate
transient currents of up to 2 mA during a conversion. In addition a static current of
about 2 mA will flow into Analog Common in the unipolar mode after a conversion is
complete. The Analog Common current will be modulated by the variations in input
signal. The absolute maximum voltage rating between the two commons is ±1 volt. It is
recommended that a parallel pair of back-to-back protection diodes be connected
between the commons if they are not connected locally.
CONTROL AND TIMING OF THE AD573
The operation of the AD573 is controlled by three inputs: CONVERT, HBE and LBE.
Starting a Conversion
The conversion cycle is initiated by a positive going CONVERT pulse at least 500
ns wide. The rising edge of this pulse resets the internal logic, clears the result of the
previous conversion, and sets DR high. The falling edge of CONVERT begins the
conversion cycle. When conversion is completed DR returns low. During the conversion
cycle, HBE and LBE should be held high. If HBE or LBE goes low during a conversion, the
data output buffers will be enabled and intermediate conversion results will be present
on the data output pins. This may cause bus conflicts if other devices in a system are
trying to use the bus.
Reading the Data
The three-state data output buffers are enabled by HBE and LBE. Access time of
these buffers is typically 150 ns (250 maximum). The data outputs remain valid until 50
ns after the enable signal returns high, and are completely into the high impedance state
100 ns later.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
78
VIDYAA VIKAS COLLEGE OF ENGINEERING AND TECHNOLOGU, TIRUCHENGODE
Max. Marks
Description
Marks Secured
Preparation 30
Performance 40
Viva Voce 10
Record 20
Total 100
Staff Signature
Result:
Thus the successive approximation analog to digital converter was constructed
and tested its performance using AD 573 IC.
LIC LAB MANUAL P.SUNDARAVADIVEL & B.SAKTHIKUMAR - AP/ECE
79
You might also like
- LIC Lab ManualDocument79 pagesLIC Lab ManualSakthikumar Balasundaram67% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- IC Lab MaualDocument59 pagesIC Lab MaualKumar Goud.K100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Op Amp Lab ManualDocument52 pagesOp Amp Lab ManualR C Shah Subhamengineers33% (3)
- 110 Integrated Circuit Projects for the Home ConstructorFrom Everand110 Integrated Circuit Projects for the Home ConstructorRating: 4.5 out of 5 stars4.5/5 (2)
- LIC Lab ManualDocument57 pagesLIC Lab ManualsfundsNo ratings yet
- S.No Particulars Specifications Range QuantityDocument11 pagesS.No Particulars Specifications Range QuantityVijayakumar KNo ratings yet
- LAB MANUAL ADSlatest PDFDocument62 pagesLAB MANUAL ADSlatest PDFP HAMSA DATTANo ratings yet
- Dic Lab Manual - PrasadDocument144 pagesDic Lab Manual - PrasadÂdâm ÎrFáñNo ratings yet
- Ica Lab (135) Iii-IDocument87 pagesIca Lab (135) Iii-IesesesNo ratings yet
- Ic Applications Lab Manual: Iii Btech, Ece-Ist SemesterDocument59 pagesIc Applications Lab Manual: Iii Btech, Ece-Ist SemesterAkshay PabbathiNo ratings yet
- Lic Lab Manual Final - 2017-2018Document36 pagesLic Lab Manual Final - 2017-2018DeepakMishraNo ratings yet
- Ade Lab ManualDocument79 pagesAde Lab ManualVinod KannaNo ratings yet
- Sir Syed CASE Institute of Technology, Islamabad Electronics LabDocument6 pagesSir Syed CASE Institute of Technology, Islamabad Electronics LabHamza AliNo ratings yet
- ECAD2 Complete ManualDocument37 pagesECAD2 Complete ManualJeremy HensleyNo ratings yet
- Ece Ade Manual 500 CopiesDocument79 pagesEce Ade Manual 500 CopiesRajkumarNo ratings yet
- IC Applications Lab ManualDocument42 pagesIC Applications Lab ManualRavikumar ImadabathuniNo ratings yet
- Expt. No. 8Document5 pagesExpt. No. 8shindevedant60No ratings yet
- Lica Lab Manual PDFDocument42 pagesLica Lab Manual PDFKashif AliNo ratings yet
- Ade Lab Manual PDFDocument104 pagesAde Lab Manual PDFnishuNo ratings yet
- Laboratory Report Cover SheetDocument15 pagesLaboratory Report Cover SheetPreet PatelNo ratings yet
- Ic Lab Manual New2Document35 pagesIc Lab Manual New2jietcivilNo ratings yet
- Current Series Feedback AmplifierDocument4 pagesCurrent Series Feedback AmplifierShivaNo ratings yet
- Electric Circuits: Lab Manual Experiment No 8Document6 pagesElectric Circuits: Lab Manual Experiment No 8usamaNo ratings yet
- To Design An Instrumentation AmplifierDocument4 pagesTo Design An Instrumentation AmplifierArun RajeshNo ratings yet
- LIC Lab ManualDocument102 pagesLIC Lab Manualkunaraj100% (2)
- Expt No. 2 (B) Common Base AmplifierDocument11 pagesExpt No. 2 (B) Common Base Amplifierrani kumarNo ratings yet
- Experiment No. 5 Adder, Subtractor, Integrator & Differentiator Using Op-AmpDocument13 pagesExperiment No. 5 Adder, Subtractor, Integrator & Differentiator Using Op-Ampchaitanya100% (4)
- Laboratory Report Cover SheetDocument14 pagesLaboratory Report Cover SheetPreet PatelNo ratings yet
- LIC Lab Manual 1Document88 pagesLIC Lab Manual 1K Sasi RekhaNo ratings yet
- Dept. of Electrical and Electronics Gogte Institute of Technology, Belagavi Linear IC's and Applications Laboratory (18EEL46)Document30 pagesDept. of Electrical and Electronics Gogte Institute of Technology, Belagavi Linear IC's and Applications Laboratory (18EEL46)BaakdNo ratings yet
- Ica Lab Student MannualDocument88 pagesIca Lab Student MannualprincegirishNo ratings yet
- EmtDocument115 pagesEmtRaj SharmaNo ratings yet
- Ic LabDocument43 pagesIc LabMohammed Younus100% (1)
- LIC Lab Manual Anna UniversityDocument83 pagesLIC Lab Manual Anna Universityankitha rajanNo ratings yet
- Lab Manual: Subject: Integrated Electronics BE 6 Section B Submitted byDocument25 pagesLab Manual: Subject: Integrated Electronics BE 6 Section B Submitted byIqraJahanNo ratings yet
- Analogue EEC436Document46 pagesAnalogue EEC436Akachi OkoroNo ratings yet
- Pe Lab ManualDocument53 pagesPe Lab ManualKada JashNo ratings yet
- Op AmpApplicationsDocument10 pagesOp AmpApplicationssrinureddy2014No ratings yet
- Masuma Mam Lab 4 & 5Document8 pagesMasuma Mam Lab 4 & 5Md. HarunNo ratings yet
- Lic Labs PDFDocument41 pagesLic Labs PDFAbdul Subhan AbbasiNo ratings yet
- Applied Electronics Lab 1Document9 pagesApplied Electronics Lab 1Rickel RoweNo ratings yet
- Ae Exp 5 Student ManualDocument4 pagesAe Exp 5 Student ManualAINo ratings yet
- IIT BH DNC Lab EE Manual Expt 4Document6 pagesIIT BH DNC Lab EE Manual Expt 4Priyesh PandeyNo ratings yet
- Exp 1 and 2Document6 pagesExp 1 and 2imvuuser1No ratings yet
- Electronics Circuit Design LabDocument34 pagesElectronics Circuit Design Labsrvdhar100% (1)
- Experiment No. 1.2 Inverting AmplifierDocument14 pagesExperiment No. 1.2 Inverting AmplifierSUNOBHAINo ratings yet
- Analog Electronics Workbook PDFDocument43 pagesAnalog Electronics Workbook PDFGokul GNo ratings yet
- Op-Amp Lab KitDocument44 pagesOp-Amp Lab KitQodor MubarakNo ratings yet
- LIC Lab ManualDocument78 pagesLIC Lab ManualPrinthya GudiyaNo ratings yet
- Lab Manual LicDocument66 pagesLab Manual LicUppum Mulakam FansNo ratings yet
- Design An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KDocument21 pagesDesign An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KMangaiyarkarasi VengatachalamNo ratings yet
- Electronic Unit 1Document35 pagesElectronic Unit 1Sudheer ManepalliNo ratings yet
- Lic Lab ManualDocument89 pagesLic Lab ManualKALAIMATHI100% (1)
- Lab 7 Power Amplifier BBN 10205 (Done)Document6 pagesLab 7 Power Amplifier BBN 10205 (Done)Zhamir ZhakwanNo ratings yet
- Intro Op AmpDocument44 pagesIntro Op AmpNimish PrabhakarNo ratings yet
- EE6611-Power Electronics and Drives LaboratoryDocument104 pagesEE6611-Power Electronics and Drives Laboratoryarshia tabassumNo ratings yet
- USB UT350UsersGuideDocument14 pagesUSB UT350UsersGuideMuhammad Faisal MahmodNo ratings yet
- A Crash Course in Radio Frequency and Frequency ManagementDocument14 pagesA Crash Course in Radio Frequency and Frequency ManagementBashir Hassan MahmoudNo ratings yet
- Coding in Communication System: Channel Coding) Will Be AddressedDocument5 pagesCoding in Communication System: Channel Coding) Will Be AddressedDuge PlakolliNo ratings yet
- IIIT Nagpur Digital Signal Processing Exam Paper During Covid-19 2020 Pandemic.Document1 pageIIIT Nagpur Digital Signal Processing Exam Paper During Covid-19 2020 Pandemic.ANKIT BHURANENo ratings yet
- Audio On ARM Cortex-M ProcessorsDocument5 pagesAudio On ARM Cortex-M ProcessorsravigobiNo ratings yet
- S221 NTLWDocument17 pagesS221 NTLWCarlos JimenezNo ratings yet
- Final Report On Speech Recognition ProjectDocument32 pagesFinal Report On Speech Recognition ProjectCeren BurcakNo ratings yet
- E.e-Sm-J530f-J5 2017Document32 pagesE.e-Sm-J530f-J5 2017drm09No ratings yet
- Soundcore Q30Document184 pagesSoundcore Q30Oscar ArranzNo ratings yet
- Product Introduction: Frequency Counter User Manual Frequency Counter User ManualDocument7 pagesProduct Introduction: Frequency Counter User Manual Frequency Counter User ManualpedroandresrodriguezNo ratings yet
- Figure.1. Shows The Total Channel Bandwidth Using Double Sideband Picture SignalDocument2 pagesFigure.1. Shows The Total Channel Bandwidth Using Double Sideband Picture SignalAdor AkoiNo ratings yet
- CHEM 201 Formula SheetDocument2 pagesCHEM 201 Formula SheetStefanoFallahaNo ratings yet
- Acas NotesDocument189 pagesAcas NotesAdi BhaiNo ratings yet
- Section 7 6 Coupled Line Directional Couplers PackageDocument24 pagesSection 7 6 Coupled Line Directional Couplers PackagePablo Escobedo AraqueNo ratings yet
- Activity1-Familizarization of Telecommunication Devices - Group 3 FINALDocument11 pagesActivity1-Familizarization of Telecommunication Devices - Group 3 FINALoaps ef3tNo ratings yet
- Subband Coding: Presented by DR.R Murugan NIT SilcharDocument11 pagesSubband Coding: Presented by DR.R Murugan NIT SilcharR MuruganNo ratings yet
- Galileo Os Sis IcdDocument88 pagesGalileo Os Sis Icdinfor7No ratings yet
- VHF 2003Document98 pagesVHF 2003reachbibhu88No ratings yet
- Applications of RADARDocument17 pagesApplications of RADARKalpesh KharatNo ratings yet
- Mwe-Ppt-Ece Iv - 0Document344 pagesMwe-Ppt-Ece Iv - 04C3 LOKESHNo ratings yet
- Lab Experiment 3 TE2016 V.em13Document6 pagesLab Experiment 3 TE2016 V.em13mstgofcoNo ratings yet
- Frequency Response (Part 1) : Mikroelektronik Devreler - 2Document21 pagesFrequency Response (Part 1) : Mikroelektronik Devreler - 2Aliemre TeltikNo ratings yet
- Adaptive Filtering RanjeetDocument7 pagesAdaptive Filtering RanjeetMichael AllenNo ratings yet
- FTDX101 Updated Functions OM ENG EH068H508Document2 pagesFTDX101 Updated Functions OM ENG EH068H508Loop AntenasNo ratings yet
- Electronics 11 03627Document18 pagesElectronics 11 03627MariusNo ratings yet
- Data Sheet - 317 Stereo Integrated Amplifier PDFDocument2 pagesData Sheet - 317 Stereo Integrated Amplifier PDFIvan MojsaNo ratings yet
- Licence Fees For Satellite Services, Networks and Terminals in The Cept October 2001Document64 pagesLicence Fees For Satellite Services, Networks and Terminals in The Cept October 2001Anonymous 3Vgw3v2ZcHNo ratings yet
- 18 Eele582 - S15 - OtfmtfDocument18 pages18 Eele582 - S15 - OtfmtfHien ThuNo ratings yet
- How Gps Receivers Work: Mem 201-Mine SurveyingDocument24 pagesHow Gps Receivers Work: Mem 201-Mine SurveyingPhillip100% (1)
- Generation of Basic Signals: AIM: To Write A MATLAB Program To Generate Various Type of Signals. AlgorithmDocument39 pagesGeneration of Basic Signals: AIM: To Write A MATLAB Program To Generate Various Type of Signals. AlgorithmMrjayanthiNo ratings yet