You might also like
- Three Dimensional Coordinate System. Functions of Two Variables. SurfacesDocument5 pagesThree Dimensional Coordinate System. Functions of Two Variables. SurfacesDamaris Kaminza100% (1)
- Mathematics: Quarter 1, Wk.7 - ModuleDocument40 pagesMathematics: Quarter 1, Wk.7 - ModuleMarwinnie Deola50% (4)
- 1183510683Document23 pages1183510683tuk2ayodejiNo ratings yet
- Learning Partner in Pre-Calculus: (Grade 11)Document52 pagesLearning Partner in Pre-Calculus: (Grade 11)Instagram PHNo ratings yet
- 1.2 Graphs of Equations and CirclesDocument19 pages1.2 Graphs of Equations and CirclesWEDD FAWAZNo ratings yet
- Important Points and Formulae: e Markedpric Discount Loss ProfitDocument4 pagesImportant Points and Formulae: e Markedpric Discount Loss ProfitTaha YousafNo ratings yet
- SurfacesDocument13 pagesSurfacescuriosity100% (1)
- Mathminiia RiahkimDocument4 pagesMathminiia Riahkimapi-342226911No ratings yet
- 3-D Analytical Geometry.326140717Document10 pages3-D Analytical Geometry.326140717vivekgojuNo ratings yet
- Area of BodedDocument5 pagesArea of BodedthinkiitNo ratings yet
- Distance Formula Midpoint FormulaDocument6 pagesDistance Formula Midpoint FormulaMilkie MangaoilNo ratings yet
- Straight LinesDocument38 pagesStraight LinesSiddhanth VengaliNo ratings yet
- Module 2 Circles and Lines NotesDocument6 pagesModule 2 Circles and Lines NotesFons Roxas-ChuaNo ratings yet
- Geometry in 3d AssignmentDocument7 pagesGeometry in 3d AssignmentFariha Tasnim MimiNo ratings yet
- Mathematics: JEE Advance Paper - 1 Solutions and ConceptsDocument20 pagesMathematics: JEE Advance Paper - 1 Solutions and Conceptsdev1996No ratings yet
- Coordinate Geometry Study GuideDocument16 pagesCoordinate Geometry Study GuideAdair Contemarero100% (1)
- Stem 1 - Pre Calculus: Lesson 2 - CirclesDocument10 pagesStem 1 - Pre Calculus: Lesson 2 - CirclesMary Jasmine AzulNo ratings yet
- Circles Module Lesson Intro to Conic SectionsDocument5 pagesCircles Module Lesson Intro to Conic SectionsShiela Mae Sotto UcangNo ratings yet
- Three Dimensional Geometry: Jeeportal - inDocument3 pagesThree Dimensional Geometry: Jeeportal - inHarsh VyasNo ratings yet
- How To Find The Equation of A Circle - ACT MathDocument14 pagesHow To Find The Equation of A Circle - ACT MathSolomon Risty CahuloganNo ratings yet
- Conic Sections OverviewDocument18 pagesConic Sections OverviewAzeNo ratings yet
- MA211 Week 3 SolutionsDocument5 pagesMA211 Week 3 SolutionsKrishaal ChandNo ratings yet
- Finite Differences and Their ApplicationsDocument46 pagesFinite Differences and Their ApplicationsAbdul RasheedNo ratings yet
- Three Dimensional Geometry ProblemsDocument14 pagesThree Dimensional Geometry ProblemsPavan GummaniNo ratings yet
- Week 001 Introduction To Conic Sections and CirclesDocument7 pagesWeek 001 Introduction To Conic Sections and CirclesSheyn SheynNo ratings yet
- Circle-01 - TheoryDocument20 pagesCircle-01 - TheoryRaju SinghNo ratings yet
- 2015 cdExamSolutionsDocument5 pages2015 cdExamSolutionsBo WangNo ratings yet
- 3D Geometry 18129201 2023 06 20 12 17Document20 pages3D Geometry 18129201 2023 06 20 12 17telate6613No ratings yet
- 2-Geom 0Document5 pages2-Geom 0CSP EDUNo ratings yet
- Circle EquationDocument9 pagesCircle EquationJohn EncarnacionNo ratings yet
- College Algebra - SampledgbsDocument25 pagesCollege Algebra - SampledgbsAbchoNo ratings yet
- Precal Notes MidtermsDocument21 pagesPrecal Notes MidtermsJudge Angelo De La Cruz100% (1)
- 13 - Co-Ordinate Geometry BBADocument6 pages13 - Co-Ordinate Geometry BBAVeerannaSHiremathNo ratings yet
- Lecture No.3 Elements of Three Dimensional Geometry Distance Formula in Three DimensionsDocument8 pagesLecture No.3 Elements of Three Dimensional Geometry Distance Formula in Three DimensionsTayyab HusaainNo ratings yet
- Independent Learning - CirclesDocument5 pagesIndependent Learning - Circleskmanav424No ratings yet
- Notes On Complex NumbersDocument8 pagesNotes On Complex NumbersPratip JanaNo ratings yet
- Q1 PRECALCULUS Learning Activity Sheet LAS 1 PDFDocument10 pagesQ1 PRECALCULUS Learning Activity Sheet LAS 1 PDFLoklok PahalNo ratings yet
- Weird MathematicsDocument29 pagesWeird MathematicsIan BeardsleyNo ratings yet
- 10.E - Applications of Vectors (Exercises)Document11 pages10.E - Applications of Vectors (Exercises)Dr. Raed GateaNo ratings yet
- Unit 5 PT 1 Functions Several VariablesDocument15 pagesUnit 5 PT 1 Functions Several Variablessprinklesdb16No ratings yet
- The Formula For The Equation of A SphereDocument5 pagesThe Formula For The Equation of A Spheresalack cosainNo ratings yet
- Analytic Geometry Section 2-6: CirclesDocument27 pagesAnalytic Geometry Section 2-6: CirclesenggNo ratings yet
- Pre CalculusDocument101 pagesPre CalculusMark Jake RodriguezNo ratings yet
- Pre-Calculus Circle EquationsDocument12 pagesPre-Calculus Circle EquationsMonica Joyce NaperiNo ratings yet
- MA40SP F ConicsNotesDocument30 pagesMA40SP F ConicsNotesJoey Chow C ANo ratings yet
- Curved Lines and Surfaces, Vectors, Matrices, Determinants, Dot ProductsDocument49 pagesCurved Lines and Surfaces, Vectors, Matrices, Determinants, Dot ProductsAlex ChalitaNo ratings yet
- Graphing Circles in Pre-CalculusDocument7 pagesGraphing Circles in Pre-CalculusMonica Joyce NaperiNo ratings yet
- Circle Equations and PropertiesDocument32 pagesCircle Equations and PropertiesKapil Gupta67% (3)
- Straight Lines - 01 - NewDocument15 pagesStraight Lines - 01 - NewMadhav MaheshwariNo ratings yet
- Aims Mathematics 2B Important Questions List 2019 20Document8 pagesAims Mathematics 2B Important Questions List 2019 20Earn real money Earn real moneyNo ratings yet
- VIT - FEM - NAAC - 2D - ScalarDocument77 pagesVIT - FEM - NAAC - 2D - ScalarprasadNo ratings yet
- Shadow FunctionsDocument14 pagesShadow FunctionsAngus 鄧雋杰 TangNo ratings yet
- 6-1 Circles: Unit 6 ConicsDocument20 pages6-1 Circles: Unit 6 ConicsSandra MillerNo ratings yet
- Chapter 2 PolynomialsDocument42 pagesChapter 2 PolynomialsnirmalvNo ratings yet
- Chapter 1 - PPT Vector3DDocument31 pagesChapter 1 - PPT Vector3DKinosraj KumaranNo ratings yet
- Equation of A CircleDocument4 pagesEquation of A CircleEq BrownNo ratings yet
- SR Maths - IIB Important QsDocument23 pagesSR Maths - IIB Important QsKeerthana100% (1)
- Module PreCalculusDocument63 pagesModule PreCalculusKaren JoyNo ratings yet
- Co-Ordinate Geometry: Axes Transformation - Questions SetDocument14 pagesCo-Ordinate Geometry: Axes Transformation - Questions Setসাজিদ হাসান আপন0% (3)
- Myanmar KeyboardDocument1 pageMyanmar Keyboardaunghtoo1No ratings yet
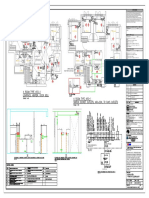
- 009 - 010 - 4 - ROOM 4R3-1 Layout (Rev-03)Document1 page009 - 010 - 4 - ROOM 4R3-1 Layout (Rev-03)aunghtoo1No ratings yet
- Parents' Guide To National Service Liability in SingaporeDocument1 pageParents' Guide To National Service Liability in Singaporeaunghtoo1No ratings yet
- What Is The ZodiacDocument5 pagesWhat Is The Zodiacaunghtoo1No ratings yet
- HSK 6 Vocabulary ListDocument100 pagesHSK 6 Vocabulary ListMateiNo ratings yet
- How Water Towers WorkDocument19 pagesHow Water Towers Workaunghtoo1No ratings yet
- Positional AstronomyDocument5 pagesPositional Astronomyaunghtoo1No ratings yet
- Level 2 Lesson 27.1Document1 pageLevel 2 Lesson 27.1aunghtoo1No ratings yet
- AcrylicDocument2 pagesAcrylicaunghtoo1No ratings yet
- The Distance Traveled On A Bike - Math CentralDocument1 pageThe Distance Traveled On A Bike - Math Centralaunghtoo1No ratings yet
- RPUB00003Document40 pagesRPUB00003Ko PaukNo ratings yet
- Technical Requirements For HS 2012 PDFDocument108 pagesTechnical Requirements For HS 2012 PDFaunghtoo1No ratings yet
- Tributary Areas IIDocument16 pagesTributary Areas IIsea_jazzNo ratings yet
- 1Document4 pages1aunghtoo1No ratings yet
- Tributary Areas IIDocument16 pagesTributary Areas IIsea_jazzNo ratings yet
- Parametric Equations - S-Cool, The Revision WebsiteDocument4 pagesParametric Equations - S-Cool, The Revision Websiteaunghtoo1No ratings yet
- Precast External WallsDocument15 pagesPrecast External Wallssreenivas_inNo ratings yet
- Tech. Articles About Marine & Offshore HVAC (3) Updated On 15-8-18Document165 pagesTech. Articles About Marine & Offshore HVAC (3) Updated On 15-8-18aunghtoo1No ratings yet
- Tributary Areas IIDocument16 pagesTributary Areas IIsea_jazzNo ratings yet
- Start PatchingDocument3 pagesStart Patchingaunghtoo1No ratings yet
- Drawing Floor Plans PDFDocument19 pagesDrawing Floor Plans PDFaunghtoo1No ratings yet
- Method of Finite Elements IDocument26 pagesMethod of Finite Elements Iaunghtoo1No ratings yet
- PRV Applications GuideDocument16 pagesPRV Applications Guidenido77No ratings yet
- Windsor Probe Strength TablesDocument4 pagesWindsor Probe Strength TablesLakshithaGonapinuwalaWithanageNo ratings yet
- PhoneticDocument16 pagesPhoneticaunghtoo1No ratings yet
- MS For CBPDocument9 pagesMS For CBPaunghtoo1No ratings yet
- Grouting TAMDocument42 pagesGrouting TAMPinoyini100% (2)
- UBW Requirements PDFDocument33 pagesUBW Requirements PDFaunghtoo1No ratings yet
- Adobe DC Activation InstructionsDocument3 pagesAdobe DC Activation Instructionsaunghtoo1100% (1)
- Revised Syllabus M-301 Ece-1Document5 pagesRevised Syllabus M-301 Ece-1Sayan ChowdhuryNo ratings yet
- 2009 Mtap GR5Document2 pages2009 Mtap GR5Conrad Dela CruzNo ratings yet
- 4024 w18 QP 11 PDFDocument20 pages4024 w18 QP 11 PDFAbdullah choudharyNo ratings yet
- Path Analysis and SEM with AMOSDocument11 pagesPath Analysis and SEM with AMOSSajid hussain awanNo ratings yet
- Comparative study of quantitative, system and contingency approaches in management theoriesDocument10 pagesComparative study of quantitative, system and contingency approaches in management theoriesF.A. AminNo ratings yet
- A Concise Introduction To Numerical AnalysisDocument213 pagesA Concise Introduction To Numerical AnalysisstanicadNo ratings yet
- 1 Small Signal ModelDocument7 pages1 Small Signal ModelAstrianaNo ratings yet
- University of Cambridge International Examinations: General Certificate of Education Ordinary LevelDocument20 pagesUniversity of Cambridge International Examinations: General Certificate of Education Ordinary LevelTF PlaysNo ratings yet
- Mathematics GR 9 Investigation Term 2 MEMORANDUM Congruency and SimilarityDocument9 pagesMathematics GR 9 Investigation Term 2 MEMORANDUM Congruency and Similaritythabo100% (1)
- Quarter 1 Module Acknowledgement Form 11 AbmDocument4 pagesQuarter 1 Module Acknowledgement Form 11 AbmChel SacdalanNo ratings yet
- Quadratic Equations PuzzleDocument3 pagesQuadratic Equations PuzzleNicholas Yates86% (7)
- 3 Applications of Partial Differentiation: 3.1 Stationary PointsDocument29 pages3 Applications of Partial Differentiation: 3.1 Stationary PointsJustin Lansa BoyleNo ratings yet
- Mellin TransformDocument32 pagesMellin TransformimtiazNo ratings yet
- Assign 03Document4 pagesAssign 03arunabh bhattacharyaNo ratings yet
- Math10 LAS Set 1 Week 1 4Document39 pagesMath10 LAS Set 1 Week 1 4Burner StuffNo ratings yet
- SSC CGL Advanced Quiz Algebra With Surds and Indices PDFDocument1 pageSSC CGL Advanced Quiz Algebra With Surds and Indices PDFsrikar13No ratings yet
- G6 DLP - Math - CotDocument5 pagesG6 DLP - Math - Cotnormy batalonaNo ratings yet
- Algebraic Formulas For Class 9th & 10thDocument1 pageAlgebraic Formulas For Class 9th & 10thسید حیسن علی شاہNo ratings yet
- Surface Modeling Unit-2Document35 pagesSurface Modeling Unit-2arunNo ratings yet
- Series Tips and TricksDocument5 pagesSeries Tips and TricksAzharAslamRajNo ratings yet
- APPhg XF PT TMH 0 A 9 X7 QenDocument33 pagesAPPhg XF PT TMH 0 A 9 X7 QenShreya Guhe100% (1)
- Analysis of Variance: Budhi Setiawan, PHDDocument17 pagesAnalysis of Variance: Budhi Setiawan, PHDNapriana DarawiNo ratings yet
- Mathematical Methods Units 1 2 AC VCE - Chapter 2Document48 pagesMathematical Methods Units 1 2 AC VCE - Chapter 2lequanplusNo ratings yet
- DMTH501 Graph Theory and Probability DMTH601 Graph Theory PDFDocument302 pagesDMTH501 Graph Theory and Probability DMTH601 Graph Theory PDFGagan SandhuNo ratings yet
- AB = √(g2 + f2 - c)2. Intercept made by x2 + y2 + 2gx + 2fy + c = 0 on the Y - axis Y A BDocument167 pagesAB = √(g2 + f2 - c)2. Intercept made by x2 + y2 + 2gx + 2fy + c = 0 on the Y - axis Y A BPriyanshu GuptaNo ratings yet
- Solution For Semester 1 (2016 - 2017)Document3 pagesSolution For Semester 1 (2016 - 2017)Sun StarNo ratings yet
- Mathematical Techniques 2 Semester 1 Lecture NotesDocument128 pagesMathematical Techniques 2 Semester 1 Lecture NotespatrickstewartswanNo ratings yet
- Calculation of Phase Envelopes and Critical Points For Multicomponent MixturesDocument10 pagesCalculation of Phase Envelopes and Critical Points For Multicomponent Mixturesflavio_cordero_1No ratings yet
- Identifying Linear FunctionsDocument9 pagesIdentifying Linear FunctionsEarl Justine Delos ReyesNo ratings yet
- Mathematics - Iii: Instructions To CandidatesDocument2 pagesMathematics - Iii: Instructions To Candidatessimar batraNo ratings yet