You might also like
- SlipringDocument6 pagesSlipringDanang AjiNo ratings yet
- The General Theory of Alternating Current Machines Application To Practical ProblemsDocument294 pagesThe General Theory of Alternating Current Machines Application To Practical ProblemsDanang Aji100% (2)
- (Percdc) Multiple Choice Questis in Electronics Engineering by Ronie VillamorDocument64 pages(Percdc) Multiple Choice Questis in Electronics Engineering by Ronie VillamorFranz Henri de GuzmanNo ratings yet
- Generalized Theory Machines PDFDocument24 pagesGeneralized Theory Machines PDFMc D'clarkNo ratings yet
- Generalized Theory of Electrical MachinesDocument16 pagesGeneralized Theory of Electrical MachinesNitish KumarNo ratings yet
- What Does It Mean by Generalized Theory of Electrical MachinesDocument6 pagesWhat Does It Mean by Generalized Theory of Electrical MachinesboumedienNo ratings yet
- Electric Motors and DeriveDocument5 pagesElectric Motors and DeriveSarib MalikNo ratings yet
- Inductances LD LQ Reluctance: The and MachinesDocument7 pagesInductances LD LQ Reluctance: The and MachinesHERNAN ALONSO BRAVO URREANo ratings yet
- CircuitTheory of ReluctanceMachines - PartIIDocument11 pagesCircuitTheory of ReluctanceMachines - PartIITaiwoNo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDocument73 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaNo ratings yet
- Analytical Comparison of Conventional and Modified Winding For High Speed Bearingless Permanent Magnet Synchronous Motor ApplicationsDocument8 pagesAnalytical Comparison of Conventional and Modified Winding For High Speed Bearingless Permanent Magnet Synchronous Motor Applicationsalstn7906No ratings yet
- Unit 3Document74 pagesUnit 3Arjun PratabNo ratings yet
- Favourable SlotDocument6 pagesFavourable Slotrakeshee2007No ratings yet
- Electrical Machines Lab March 16 UpdateDocument53 pagesElectrical Machines Lab March 16 Updatepeter vanderNo ratings yet
- Class 3Document11 pagesClass 3Manjula sNo ratings yet
- A Successful Experiment of An Electronically AssistedDocument7 pagesA Successful Experiment of An Electronically Assisteddillon deonathNo ratings yet
- Six-Phase Supply Feasibility Using A PM Fractional-Slot Dual Winding MachineDocument8 pagesSix-Phase Supply Feasibility Using A PM Fractional-Slot Dual Winding MachinestoneminerNo ratings yet
- Power Systems Modeling: M. Tech. First Semester (Integrated Power System / Power Elect. & Power System) (C.B.C.S.)Document2 pagesPower Systems Modeling: M. Tech. First Semester (Integrated Power System / Power Elect. & Power System) (C.B.C.S.)Mahesh ShendeNo ratings yet
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDocument11 pagesMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoNo ratings yet
- EEE20005 Week 6 7Document96 pagesEEE20005 Week 6 7ShelbyNo ratings yet
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document1 pageIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedNo ratings yet
- Simulation of Symmetrical Induction MachineryDocument16 pagesSimulation of Symmetrical Induction MachineryIfat 'ipeh' FatmawatiNo ratings yet
- 1965 Simulation of Symmetrical Induction Machinery KrauseDocument16 pages1965 Simulation of Symmetrical Induction Machinery KrauseFabiana SinghNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityjijo123408No ratings yet
- A New Multiphase Rotor Model For The Squirrel Cage Rotor of A Six-Phase Induction MachineDocument7 pagesA New Multiphase Rotor Model For The Squirrel Cage Rotor of A Six-Phase Induction MachineMoyasserengAlattarNo ratings yet
- Ex501 Electrical Machines Ii: Unit-I D.C. Machine-IDocument25 pagesEx501 Electrical Machines Ii: Unit-I D.C. Machine-IDeependra SinghNo ratings yet
- Ex501 Electrical Machines Ii: Unit-I D.C. Machine-IDocument25 pagesEx501 Electrical Machines Ii: Unit-I D.C. Machine-IDeependra SinghNo ratings yet
- DC MotorDocument53 pagesDC MotorK04Anoushka TripathiNo ratings yet
- Synchronous Machine Armature WindingsDocument32 pagesSynchronous Machine Armature Windingsiniyavan3119100% (1)
- Modeling For A Dual Three-Phase Induction Motor Based On A Winding TransformationDocument5 pagesModeling For A Dual Three-Phase Induction Motor Based On A Winding TransformationSHUBHAM DABRALNo ratings yet
- 1 Permanent Magnet GeneratorDocument6 pages1 Permanent Magnet GeneratorGanti KameshNo ratings yet
- ML023030070 USNRC Power Plant Engineering 3Document170 pagesML023030070 USNRC Power Plant Engineering 3MutahirrasoolNo ratings yet
- 3.basic Concept of Rotating Electrical Machine PDFDocument126 pages3.basic Concept of Rotating Electrical Machine PDFStadpyrkhat lyngkhoiNo ratings yet
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Document32 pagesFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyNo ratings yet
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument8 pagesComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNo ratings yet
- D.C. Generators: ChapterDocument34 pagesD.C. Generators: ChapterHuỳnh Thanh ThiệnNo ratings yet
- UNIT-Three (I) DC GeneratorsDocument10 pagesUNIT-Three (I) DC GeneratorsDawit LijalemNo ratings yet
- Final08 To Final12 221 IEC Lecture Part02Document50 pagesFinal08 To Final12 221 IEC Lecture Part02Fariha ShahrinNo ratings yet
- Lecture 04 - Chap 3 Modeling of Generators and TransformersDocument20 pagesLecture 04 - Chap 3 Modeling of Generators and TransformersHabes NoraNo ratings yet
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanNo ratings yet
- Iare Acm Lecture NotesDocument126 pagesIare Acm Lecture NotesAriel Ombajen MentawanNo ratings yet
- Electrical Technology IIDocument2 pagesElectrical Technology IIrony RkNo ratings yet
- 3.chapter Three-Starting System 1Document21 pages3.chapter Three-Starting System 1Ahmed M MerzaNo ratings yet
- Synchronous MachinesDocument31 pagesSynchronous Machinesrambala123No ratings yet
- Reading.6 - Introduction To Electric MachinesDocument8 pagesReading.6 - Introduction To Electric MachinesCát TườngNo ratings yet
- Alternating Voltages and CurrentsDocument1 pageAlternating Voltages and CurrentsVarun MNo ratings yet
- 2010 MachinesDocument3 pages2010 MachinespjnarjinaryNo ratings yet
- Design and Analysis of Brushless Self-Excited Three-Phase Synchronous GeneratorDocument6 pagesDesign and Analysis of Brushless Self-Excited Three-Phase Synchronous GeneratorVenkataSudheerNo ratings yet
- EM I Unit IIDocument87 pagesEM I Unit IIPrakashNo ratings yet
- EASA Mod 3 BK 4 Ac & DC Mech PDFDocument76 pagesEASA Mod 3 BK 4 Ac & DC Mech PDFNavaraj BaniyaNo ratings yet
- BRP Bee Module 4Document16 pagesBRP Bee Module 4priyaNo ratings yet
- Complete Chapter1 and TutorialDocument19 pagesComplete Chapter1 and TutorialstevennguimsNo ratings yet
- Electrical Machines DC Motor NewDocument27 pagesElectrical Machines DC Motor NewPranav MahadikNo ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument23 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringShafaq TauqirNo ratings yet
- Sudden Short Circuiting of Synchronous Machines by EMTP: Eiichi Haginomori and Shinya OhtsukaDocument11 pagesSudden Short Circuiting of Synchronous Machines by EMTP: Eiichi Haginomori and Shinya OhtsukaPadmo PadmundonoNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- The Wave Concept in Electromagnetism and Circuits: Theory and ApplicationsFrom EverandThe Wave Concept in Electromagnetism and Circuits: Theory and ApplicationsNo ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- Local Traffic Aware Unicast Routing Scheme For Connected Car SystemDocument16 pagesLocal Traffic Aware Unicast Routing Scheme For Connected Car SystemDanang AjiNo ratings yet
- CD-AX/APX Series: ABS Digimatic CaliperDocument4 pagesCD-AX/APX Series: ABS Digimatic CaliperDanang AjiNo ratings yet
- An Analysis DC-Machine Commutation: JapanDocument9 pagesAn Analysis DC-Machine Commutation: JapanDanang AjiNo ratings yet
- Brush HoldersDocument4 pagesBrush HoldersDanang Aji100% (1)
- Commutator Patina PDFDocument3 pagesCommutator Patina PDFDanang AjiNo ratings yet
- Direction of The Electric Spark. 417: Scai-CDocument3 pagesDirection of The Electric Spark. 417: Scai-CDanang AjiNo ratings yet
- Introduction of General Theory of Electrical Machines Into University CoursesDocument4 pagesIntroduction of General Theory of Electrical Machines Into University CoursesDanang AjiNo ratings yet
- 2017 PTT Tds 11 Pressure On Carbon Brushes MersenDocument4 pages2017 PTT Tds 11 Pressure On Carbon Brushes MersenDanang AjiNo ratings yet
- 82 97 2 PB PDFDocument9 pages82 97 2 PB PDFDanang AjiNo ratings yet
- A Performance Comparison of Nonlinear and Linear Control For A DC Series MotorDocument10 pagesA Performance Comparison of Nonlinear and Linear Control For A DC Series MotorDanang AjiNo ratings yet
- Journal of Energy Storage: J.P. Rouse, S.D. Garvey, B. Cárdenas, T.R. Davenne TDocument15 pagesJournal of Energy Storage: J.P. Rouse, S.D. Garvey, B. Cárdenas, T.R. Davenne TDanang AjiNo ratings yet
- Guide Vanes in Francis TurbinesDocument47 pagesGuide Vanes in Francis TurbinesDanang AjiNo ratings yet
- Motor Control: A DC System For Electric DriveDocument8 pagesMotor Control: A DC System For Electric DriveDanang AjiNo ratings yet
- High-Speed (MHZ) Series Resonant Converter (SRC)Document12 pagesHigh-Speed (MHZ) Series Resonant Converter (SRC)teomondoNo ratings yet
- Giáo Trình Tiếng Anh Chuyên Ngành Hệ Thống ĐiệnDocument44 pagesGiáo Trình Tiếng Anh Chuyên Ngành Hệ Thống ĐiệnTieu Ngoc LyNo ratings yet
- Physics ProjectDocument9 pagesPhysics ProjectAkshata AnkolekarNo ratings yet
- Physics Imp Derivations + TheoryDocument6 pagesPhysics Imp Derivations + TheoryAL Surya67% (3)
- 06 Modeling Single Phase TransfoDocument25 pages06 Modeling Single Phase TransfoJulie MartinNo ratings yet
- Most Expected PU - II Physics Questions For 2020-2021Document16 pagesMost Expected PU - II Physics Questions For 2020-2021Navaneeth MsNo ratings yet
- Parte 2 Fundamentos Electromagneticos Con Matlab - Lonngren & SavovDocument354 pagesParte 2 Fundamentos Electromagneticos Con Matlab - Lonngren & SavovAlbert HernándezNo ratings yet
- Nuts and Volts 2018 07-08Document100 pagesNuts and Volts 2018 07-08Nicu Florica100% (2)
- 2 - BP Machine 3Document113 pages2 - BP Machine 3DGAFNo ratings yet
- 2017-IT EMC Filters Guide Low-Res PDFDocument47 pages2017-IT EMC Filters Guide Low-Res PDFSanjay ParelkarNo ratings yet
- Calculation of Arc-Circuit Asymmetry in Electric-Arc FurnacesDocument6 pagesCalculation of Arc-Circuit Asymmetry in Electric-Arc FurnacesMark WoodNo ratings yet
- The HANDI-Finder Experimenter's Kit: 10th Edition, May 28, 2017Document14 pagesThe HANDI-Finder Experimenter's Kit: 10th Edition, May 28, 2017palahobara0% (1)
- Arihant Objective Physics Volume 2 For Class 12 For Engineering PDFDocument849 pagesArihant Objective Physics Volume 2 For Class 12 For Engineering PDFJayany Nunna83% (6)
- "Determination of Parameters in The Universal Induction Motor Model" Anand KumarDocument19 pages"Determination of Parameters in The Universal Induction Motor Model" Anand KumarAmit VermaNo ratings yet
- P10 MetalDet G4 FinalReportDocument15 pagesP10 MetalDet G4 FinalReportherrberk100% (1)
- Bee Book by Gulzar AhmadDocument337 pagesBee Book by Gulzar AhmadMegha Singh100% (1)
- ModotewuwunapibixifigiDocument3 pagesModotewuwunapibixifigiHLULANI MAIMELANo ratings yet
- Emi 2Document81 pagesEmi 2setsindia3735No ratings yet
- Design of Forward Converter With Energy Regenerative SnubberDocument30 pagesDesign of Forward Converter With Energy Regenerative SnubberMityaNo ratings yet
- Surge - Protection For Sync MachDocument8 pagesSurge - Protection For Sync MachpwmvsiNo ratings yet
- Dong DissertationDocument173 pagesDong Dissertationvijayasiva86No ratings yet
- Principles of Circuit Breakers: Difference Between An Isolator and Circuit BreakerDocument18 pagesPrinciples of Circuit Breakers: Difference Between An Isolator and Circuit BreakerdemokykNo ratings yet
- rm12 463 766 PDFDocument304 pagesrm12 463 766 PDFMartin Estrada SotoNo ratings yet
- Wireless Power DERIVATION OF AN 'INVERSE LI ENARD-WIECHERT EFFECT' FROM THE LORENTZ FORCE AND ITS APPLICATION TO THE WIRELESS POWER TRANSFERDocument10 pagesWireless Power DERIVATION OF AN 'INVERSE LI ENARD-WIECHERT EFFECT' FROM THE LORENTZ FORCE AND ITS APPLICATION TO THE WIRELESS POWER TRANSFERRobertFBishopNo ratings yet
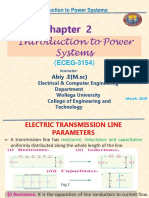
- Introduction To Power Systems: (ECEG-3154)Document41 pagesIntroduction To Power Systems: (ECEG-3154)Tsega Solomon KidaneNo ratings yet
- Questions & Answers On Inductance, Capacitance, and Mutual InductanceDocument7 pagesQuestions & Answers On Inductance, Capacitance, and Mutual Inductancekibrom atsbhaNo ratings yet
- Be Careful of Self and Mutual Inductance Formulae PDFDocument6 pagesBe Careful of Self and Mutual Inductance Formulae PDFsmartmathNo ratings yet
- LMR Final Physics 3.30Document23 pagesLMR Final Physics 3.30chandra bose100% (1)
- Updated Transformers Notes 6th Sem EEE CAEDDocument42 pagesUpdated Transformers Notes 6th Sem EEE CAEDdeepu kumarNo ratings yet