You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenFrom EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenRating: 4 out of 5 stars4/5 (2)
- MSE 2241 HomeworkDocument10 pagesMSE 2241 HomeworkBayejid Bin Zahid 1611942642No ratings yet
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- DC Generators ExplainedDocument85 pagesDC Generators Explainedsrivaas131985No ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Nothing in ParticularDocument482 pagesNothing in ParticularАлександар ЧупићNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Terahertz Frequency: A New Addition To Electromagnetic SpectrumDocument26 pagesTerahertz Frequency: A New Addition To Electromagnetic Spectrumkirlaniano@gmail.com100% (1)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- 1 As Unit One Getting Through Lesson PlanDocument26 pages1 As Unit One Getting Through Lesson PlanRihabSallam83% (6)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Light as waves and particlesDocument7 pagesLight as waves and particlesMorena AbayonNo ratings yet
- Chapter 22: Optical Properties: Issues To Address..Document32 pagesChapter 22: Optical Properties: Issues To Address..Qaz ZaqNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Forward Modelling Seismic Refraction MatlabDocument8 pagesForward Modelling Seismic Refraction MatlabaisyanrhfyyaNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- PM BLDC Motor Drives ExplainedDocument15 pagesPM BLDC Motor Drives ExplainedMahua ChandaNo ratings yet
- Synchronous Machines Synchronous Machines: OutlineDocument31 pagesSynchronous Machines Synchronous Machines: Outlinesameerpatel15770No ratings yet
- Machines Tutorial Sheet #3 (2024)Document4 pagesMachines Tutorial Sheet #3 (2024)Riya KoretiNo ratings yet
- Assignment No 1Document8 pagesAssignment No 1Debajit MalakarNo ratings yet
- Design Study On Novel Three-Phase Rotary Transformer Used For Brushless Doubly Fed Induction GeneratorsDocument4 pagesDesign Study On Novel Three-Phase Rotary Transformer Used For Brushless Doubly Fed Induction GeneratorsHuong ThaoNo ratings yet
- Synchronous MachinesDocument31 pagesSynchronous Machinesrambala123No ratings yet
- Brushless DC Motor: Position Linear Control SimulationDocument6 pagesBrushless DC Motor: Position Linear Control SimulationsebastianG1995No ratings yet
- Synchronous Machine Theory and ModelingDocument108 pagesSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- Design and Simulation of Field Voltage Control For Synchronous GeneratorDocument6 pagesDesign and Simulation of Field Voltage Control For Synchronous GeneratorThet TinNo ratings yet
- Electrical Machine & Control SystemsDocument30 pagesElectrical Machine & Control SystemsHatem DheerNo ratings yet
- Auxiliary Windings, Supplying The AVR of A Brushless Synchronous Generator 2005Document5 pagesAuxiliary Windings, Supplying The AVR of A Brushless Synchronous Generator 2005Jalil EmadiNo ratings yet
- L-33 (SM) (Ia&c) ( (Ee) Nptel)Document18 pagesL-33 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- c8 PDFDocument64 pagesc8 PDFAnjaana PrashantNo ratings yet
- Chapter 4Document20 pagesChapter 4Mohammad Ali ShahNo ratings yet
- Ec5040 16.02.2024Document12 pagesEc5040 16.02.2024Wonder KingNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- IAS Mains Electrical Engineering 1994Document10 pagesIAS Mains Electrical Engineering 1994rameshaarya99No ratings yet
- Chapter 1 - DC Generator Parts and Working PrinciplesDocument18 pagesChapter 1 - DC Generator Parts and Working PrinciplesJay Johnel ManaloNo ratings yet
- DC Generators TechniquesDocument74 pagesDC Generators TechniquesAbdulrazzaqNo ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- complete chapter1 and tutorialDocument19 pagescomplete chapter1 and tutorialstevennguimsNo ratings yet
- Transformer Guide: Voltage Levels, Ideal Operation & AnalysisDocument59 pagesTransformer Guide: Voltage Levels, Ideal Operation & AnalysisTeshale AlemieNo ratings yet
- 3.basic Concept of Rotating Electrical Machine PDFDocument126 pages3.basic Concept of Rotating Electrical Machine PDFStadpyrkhat lyngkhoiNo ratings yet
- Power Electronics Concept in Power SystemsDocument9 pagesPower Electronics Concept in Power SystemsT.l. SelvamNo ratings yet
- Electrical Machine PracticalDocument11 pagesElectrical Machine PracticalOyetayo Muhammad Jamiu olamideNo ratings yet
- Eee NoteDocument4 pagesEee NoteNusaeb Ahmed FarhanNo ratings yet
- EEE3001 Lab ManualDocument66 pagesEEE3001 Lab ManualReshab Sahoo100% (1)
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDocument73 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaNo ratings yet
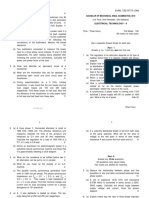
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document3 pagesIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedNo ratings yet
- ConverDocument11 pagesConverAnonymous tJgIbVzpNo ratings yet
- DC Generators NotesDocument9 pagesDC Generators NotesDongara RameshNo ratings yet
- DC MachinesDocument102 pagesDC MachinesmohamedashrafkotpNo ratings yet
- Scalar (V/f) Control of 3-Phase Induction MotorsDocument28 pagesScalar (V/f) Control of 3-Phase Induction MotorsDaniel DanyNo ratings yet
- Electrical Technology IIDocument2 pagesElectrical Technology IIrony RkNo ratings yet
- AlternatorsDocument28 pagesAlternatorshs637717No ratings yet
- Inductances LD LQ Reluctance: The and MachinesDocument7 pagesInductances LD LQ Reluctance: The and MachinesHERNAN ALONSO BRAVO URREANo ratings yet
- NR 310204 Power ElectronicsDocument8 pagesNR 310204 Power ElectronicsSrinivasa Rao G100% (1)
- Module 4 AC MachinesDocument19 pagesModule 4 AC MachinesAffan KhanNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Prof. Ch. SAI BABU: TopicDocument90 pagesProf. Ch. SAI BABU: TopicAbhimanyu Perumal100% (3)
- CH 3 - Induction MotorsDocument46 pagesCH 3 - Induction MotorsMiz AelyfhaNo ratings yet
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 pagesLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Resistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisFrom EverandResistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisNo ratings yet
- SolarEenergyUtilization ReportDocument276 pagesSolarEenergyUtilization ReportSatit Phiyanalinmat100% (2)
- Medgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesDocument9 pagesMedgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesHabes NoraNo ratings yet
- 1 EurikaDocument11 pages1 Eurikaslt100% (1)
- Experimental Performance Characterization of Photovoltaic Modules Using DAQDocument10 pagesExperimental Performance Characterization of Photovoltaic Modules Using DAQHabes NoraNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- 2009 Report Solar EnergyDocument80 pages2009 Report Solar EnergypaulwaNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- Medgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesDocument9 pagesMedgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesHabes NoraNo ratings yet
- Email vs snail mail: which is betterDocument34 pagesEmail vs snail mail: which is betterHuire GhazaNo ratings yet
- An Integrated Inverter With Maximum Power Tracking For Grid-Connected PV SystemsDocument10 pagesAn Integrated Inverter With Maximum Power Tracking For Grid-Connected PV Systemswalidghoneim1970No ratings yet
- Email vs snail mail: which is betterDocument34 pagesEmail vs snail mail: which is betterHuire GhazaNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- Medgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesDocument9 pagesMedgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesHabes NoraNo ratings yet
- Identification of Model Parameters of The Photovoltaic Solar CellsDocument8 pagesIdentification of Model Parameters of The Photovoltaic Solar CellsHabes NoraNo ratings yet
- 2009 Report Solar EnergyDocument80 pages2009 Report Solar EnergypaulwaNo ratings yet
- Medgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesDocument9 pagesMedgreen-Lb 2011 Photovoltaic Cell /Panel/Array Characterizations and Modeling Considering Both Reverse and Direct ModesHabes NoraNo ratings yet
- Experimental Performance Characterization of Photovoltaic Modules Using DAQDocument10 pagesExperimental Performance Characterization of Photovoltaic Modules Using DAQHabes NoraNo ratings yet
- Email vs snail mail: which is betterDocument34 pagesEmail vs snail mail: which is betterHuire GhazaNo ratings yet
- Email vs snail mail: which is betterDocument34 pagesEmail vs snail mail: which is betterHuire GhazaNo ratings yet
- 1 EurikaDocument11 pages1 Eurikaslt100% (1)
- Physics Investigatory Project 12Document19 pagesPhysics Investigatory Project 12BatmanNo ratings yet
- MIT5 111F14 Lec04SolnDocument2 pagesMIT5 111F14 Lec04SolnFaiza Jan IftikharNo ratings yet
- AbstractDocument9 pagesAbstractSimranNo ratings yet
- 1 Introduction - LasersDocument33 pages1 Introduction - LasersMarin PetricevicNo ratings yet
- 10 Dual Nature of Matter and RadiationDocument7 pages10 Dual Nature of Matter and RadiationnagarajanNo ratings yet
- Title: RF Generator Frequency Measurement Experiment 1: ObjectiveDocument5 pagesTitle: RF Generator Frequency Measurement Experiment 1: Objectivebezawit hailemariamNo ratings yet
- OpticsDocument113 pagesOpticsGellirose S. BantayanNo ratings yet
- Step Index and Graded Index FiberDocument23 pagesStep Index and Graded Index FiberPankaj Garg0% (2)
- Logic GatesDocument25 pagesLogic GatesRitesh Kumar70% (30)
- Lecture 4 - Optical Fiber Waveguides Ray Theory Part - 1Document9 pagesLecture 4 - Optical Fiber Waveguides Ray Theory Part - 1samarthNo ratings yet
- M2 Transformers Testing Efficiency Regulation AutotransformerDocument23 pagesM2 Transformers Testing Efficiency Regulation AutotransformertinkudhullNo ratings yet
- Short Answer Questions - I (PYQ) : - F RespectivelyDocument18 pagesShort Answer Questions - I (PYQ) : - F Respectivelyashok pradhanNo ratings yet
- Radio WaveDocument35 pagesRadio WaveMuruganNo ratings yet
- Electrical Machines PDFDocument54 pagesElectrical Machines PDFMallikarjunBhirade100% (1)
- Catalogo Luxycon 2020¡¡¡¡¡¡¡¡¡¡¡¡Document338 pagesCatalogo Luxycon 2020¡¡¡¡¡¡¡¡¡¡¡¡Alvaro GutierrezNo ratings yet
- Optics and Optical Instruments: A Concise GuideDocument24 pagesOptics and Optical Instruments: A Concise GuideFF LoverNo ratings yet
- Solucionario Practica 4Document22 pagesSolucionario Practica 4Dolores RachelNo ratings yet
- BotanyDocument18 pagesBotanyAditya RudraNo ratings yet
- Jonan Mini MeterDocument7 pagesJonan Mini Metersoldatbr4183No ratings yet
- Electromagnetic InductionDocument25 pagesElectromagnetic InductionthejaswinisunilNo ratings yet
- Sheet Laser Prinsiple S12019Document19 pagesSheet Laser Prinsiple S12019K3KENo ratings yet
- PS08 3Document2 pagesPS08 3RandomNo ratings yet
- Ray Optics Assignment - 1 1668611679Document3 pagesRay Optics Assignment - 1 1668611679Jaskaran SinghNo ratings yet
- Q4 STEM General Physics 2 Week 4Document4 pagesQ4 STEM General Physics 2 Week 4lamoks.gamingNo ratings yet