You might also like
- High Performance Position Control of Permanent Magnet Synchronous DrivesDocument11 pagesHigh Performance Position Control of Permanent Magnet Synchronous DrivesdjoodjooNo ratings yet
- Microprocessors and Microsystems: K. Thangarajan, A. SoundarrajanDocument10 pagesMicroprocessors and Microsystems: K. Thangarajan, A. SoundarrajanfvijayamiNo ratings yet
- Comparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesDocument6 pagesComparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesTony starkNo ratings yet
- IPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved AlgorithmDocument10 pagesIPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved Algorithmalaref elhajNo ratings yet
- 2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsDocument13 pages2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsjemmyducNo ratings yet
- Machine Learning Based Adaptive PredictionDocument9 pagesMachine Learning Based Adaptive PredictionnhatvpNo ratings yet
- Energies 17 00147Document13 pagesEnergies 17 00147Global PapersNo ratings yet
- [24]A Duty Ratio Control Strategy to Reduce Both Torque and Flux Ripples of DTC for Permanent Magnet Synchronous MachinesDocument10 pages[24]A Duty Ratio Control Strategy to Reduce Both Torque and Flux Ripples of DTC for Permanent Magnet Synchronous MachinesNguyễn Văn HoàNo ratings yet
- Electronics 10 02080 With CoverDocument37 pagesElectronics 10 02080 With CoverMarcel NicolaNo ratings yet
- Modified Field Oriented Control For Smooth Torque Operation of A BLDC MotorDocument6 pagesModified Field Oriented Control For Smooth Torque Operation of A BLDC MotorTony starkNo ratings yet
- 2015 Fast-SpeedDrivesforPermanentMagnetDocument7 pages2015 Fast-SpeedDrivesforPermanentMagnetjemmyducNo ratings yet
- MPC A Simple and Powerful Method To Control Power ConvertersDocument13 pagesMPC A Simple and Powerful Method To Control Power ConvertersDavidNo ratings yet
- Sustainability 14 13522Document23 pagesSustainability 14 13522Crisha De Guzman PunzalanNo ratings yet
- Sensorless DTC of induction motor with sliding mode controllersDocument20 pagesSensorless DTC of induction motor with sliding mode controllersMuhammad UmarNo ratings yet
- Improved Model-Free Predictive Current Control For Synchronous Reluctance Motor DrivesDocument12 pagesImproved Model-Free Predictive Current Control For Synchronous Reluctance Motor Driveshamza mesaiNo ratings yet
- Tarakanath2014IMC BoostDocument7 pagesTarakanath2014IMC BoostByron Paul CajamarcaNo ratings yet
- 08598921外文1Document11 pages08598921外文11392297140sNo ratings yet
- Constant Switching Frequency DTC Reduces Torque RippleDocument9 pagesConstant Switching Frequency DTC Reduces Torque RippleIslo BenNo ratings yet
- Published - 2021 01 0776Document8 pagesPublished - 2021 01 0776Chingis BimanovNo ratings yet
- An Improved Model Predictive Current Control For PMSM Drives Based On Current Track CircleDocument11 pagesAn Improved Model Predictive Current Control For PMSM Drives Based On Current Track Circletaddese bekeleNo ratings yet
- Modulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost FunctionDocument10 pagesModulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost FunctionGlobal PapersNo ratings yet
- Direct Torque Control With Constant Switching Frequency for Five-Phase Matrix Converter DriveDocument15 pagesDirect Torque Control With Constant Switching Frequency for Five-Phase Matrix Converter DriveKill MongerNo ratings yet
- A Duty Ratio Control Strategy To Reduce Both Torque and Flux Ripples of DTC For Permanent Magnet Synchronous MachinesDocument9 pagesA Duty Ratio Control Strategy To Reduce Both Torque and Flux Ripples of DTC For Permanent Magnet Synchronous MachinesSONU KUMARNo ratings yet
- Article 1Document12 pagesArticle 1soroush.atashin93No ratings yet
- Assessing Finite-Control-Set Model Predictive ControlDocument9 pagesAssessing Finite-Control-Set Model Predictive ControlPhan Thanh VanNo ratings yet
- Compact Realisation of PWM-VSL Current Controller ForDocument6 pagesCompact Realisation of PWM-VSL Current Controller ForpurplenazNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 pagesModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiNo ratings yet
- An Experimental Assessment of Direct Torque Control and Model Predictive Control Methods for Induction Machine DriveDocument6 pagesAn Experimental Assessment of Direct Torque Control and Model Predictive Control Methods for Induction Machine DriveAbo KikiNo ratings yet
- Constrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterDocument24 pagesConstrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterShaheer DurraniNo ratings yet
- Predictive Current Trajectory Control For PMSM atDocument10 pagesPredictive Current Trajectory Control For PMSM atsurya bobbiliNo ratings yet
- Energies 15 01045Document18 pagesEnergies 15 01045Adrian MarinNo ratings yet
- Research ArticleDocument8 pagesResearch Articletariq76No ratings yet
- Energies 14 02256Document18 pagesEnergies 14 02256DAVID SANTOS MARTINNo ratings yet
- Design of Nonlinear PID Neural Controller For The Speed Control of A Permanent Magnet DC Motor Model Based On Optimization AlgorithmDocument11 pagesDesign of Nonlinear PID Neural Controller For The Speed Control of A Permanent Magnet DC Motor Model Based On Optimization AlgorithmIzza AnshoryNo ratings yet
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftDocument11 pagesSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikNo ratings yet
- A Vector Control System of PMSM With The Assistance of Fuzzy PID ControllerDocument6 pagesA Vector Control System of PMSM With The Assistance of Fuzzy PID ControllerFelix Adrian Trujillo PerdomoNo ratings yet
- The Adaptive Backstepping Control of Permanent Magnet Synchronous Motor Supplied by Current Source InverterDocument9 pagesThe Adaptive Backstepping Control of Permanent Magnet Synchronous Motor Supplied by Current Source InverterLê Đức ThịnhNo ratings yet
- Nicola - Marcel - ICATE 2016Document6 pagesNicola - Marcel - ICATE 2016Marcel NicolaNo ratings yet
- Without HighlightingDocument10 pagesWithout HighlightingHamid SuliamanNo ratings yet
- Field Oriented Control of Permanent Magnet Synchronous Motor Using Predictive Space Vector ModulationDocument7 pagesField Oriented Control of Permanent Magnet Synchronous Motor Using Predictive Space Vector ModulationKiki RamadhanNo ratings yet
- Docs 3396757885dc8d92655bafDocument11 pagesDocs 3396757885dc8d92655bafRival PratamaNo ratings yet
- Model Predictive Direct Torque Control Methods For SpeedDocument25 pagesModel Predictive Direct Torque Control Methods For SpeedAayush PatidarNo ratings yet
- Maximum Torque Per Voltage Flux-Weakening Strategy With Speed Limiter For PMSM DrivesDocument11 pagesMaximum Torque Per Voltage Flux-Weakening Strategy With Speed Limiter For PMSM DrivesdavidalonsolorenzoNo ratings yet
- Robust Predictive Current Control For A Sensorless IM Drive Based On Torque Angle RegulationDocument7 pagesRobust Predictive Current Control For A Sensorless IM Drive Based On Torque Angle RegulationDanielle GontijoNo ratings yet
- PMSM Field-Oriented ControlDocument18 pagesPMSM Field-Oriented Controlthhluong.sdh232No ratings yet
- Runge-Kutta Model Predictive Speed Control For PerDocument17 pagesRunge-Kutta Model Predictive Speed Control For PerAmir KrzNo ratings yet
- Model Predictive Based Load Frequency Control Design in The Presence of DFIG Wind TurbineDocument5 pagesModel Predictive Based Load Frequency Control Design in The Presence of DFIG Wind TurbineILBERIPUCINo ratings yet
- FOC Design of PMSM by Multi-Objective OptimizationDocument7 pagesFOC Design of PMSM by Multi-Objective OptimizationHùng MạnhNo ratings yet
- Energies 13 02597 v2 PDFDocument14 pagesEnergies 13 02597 v2 PDFPhan VănNo ratings yet
- PMSM MatlabDocument6 pagesPMSM MatlabLê Đức ThịnhNo ratings yet
- Model Predictive Current Control of ModularDocument11 pagesModel Predictive Current Control of Modularvahid barahoueiNo ratings yet
- Model-Predictive Control of Induction Motor Drives: Torque Control Versus Flux ControlDocument11 pagesModel-Predictive Control of Induction Motor Drives: Torque Control Versus Flux ControlAbhisekPalNo ratings yet
- Simulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorDocument18 pagesSimulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorVictor IkechukwuNo ratings yet
- A0408 05-0112 PDFDocument12 pagesA0408 05-0112 PDFIJMERNo ratings yet
- A New Model Predictive Control Approach To DC-DC Converter Based On Combinatory OptimizationDocument8 pagesA New Model Predictive Control Approach To DC-DC Converter Based On Combinatory OptimizationChaudhry Fahad Ali FastNUNo ratings yet
- Korea2010 1Document6 pagesKorea2010 1tarekhieNo ratings yet
- ANN PMSM Speed ControlDocument8 pagesANN PMSM Speed ControlKushagra KhamesraNo ratings yet
- Microprocessors and Microsystems: Ganesan R, S. Suresh, SS SivarajuDocument9 pagesMicroprocessors and Microsystems: Ganesan R, S. Suresh, SS SivarajufvijayamiNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Plutus IAS Daily Current Affairs 26feb 2022Document5 pagesPlutus IAS Daily Current Affairs 26feb 2022Alvaajid SaleemNo ratings yet
- AUTOCADDDocument18 pagesAUTOCADDAlvaajid SaleemNo ratings yet
- Understanding - HVACDocument39 pagesUnderstanding - HVACFaisal Saif100% (1)
- DUctDocument16 pagesDUctAlvaajid SaleemNo ratings yet
- Electrical Project ReportDocument30 pagesElectrical Project ReportAlvaajid SaleemNo ratings yet
- Electrical Design IntroductionDocument7 pagesElectrical Design IntroductionAlvaajid SaleemNo ratings yet
- Understanding - HVACDocument39 pagesUnderstanding - HVACFaisal Saif100% (1)
- Tips For SUccessDocument21 pagesTips For SUccessAlvaajid SaleemNo ratings yet
- Car Park Ventilation System DesignDocument15 pagesCar Park Ventilation System DesignAlvaajid SaleemNo ratings yet
- Brushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterDocument9 pagesBrushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterAlvaajid SaleemNo ratings yet
- SSLC, Plus One & Plus Two Maths Tuition TrichyDocument1 pageSSLC, Plus One & Plus Two Maths Tuition TrichyAlvaajid SaleemNo ratings yet
- Read MeDocument1 pageRead MeAnbalagan MNo ratings yet
- Know About The Chess BoardDocument11 pagesKnow About The Chess BoardAlvaajid SaleemNo ratings yet
- Book Cover PageDocument6 pagesBook Cover PageAlvaajid SaleemNo ratings yet
- Toilet Room: Light Circuit (LC) CalculationDocument10 pagesToilet Room: Light Circuit (LC) CalculationAlvaajid SaleemNo ratings yet
- Coil LoadDocument13 pagesCoil LoadMakarand DeshpandeNo ratings yet
- Excel For LightingDocument13 pagesExcel For LightingAlvaajid SaleemNo ratings yet
- Appliances Layout: E D C B F G H ADocument1 pageAppliances Layout: E D C B F G H AAlvaajid SaleemNo ratings yet
- Toilet Room: Light Circuit (LC) CalculationDocument10 pagesToilet Room: Light Circuit (LC) CalculationAlvaajid SaleemNo ratings yet
- 100 Advices From QuranDocument4 pages100 Advices From QurannitbeNo ratings yet
- Kitchen Burner With Oven - PC1 - R4 Kitchen Double Deep Fat Fryer-PC2 - R5 Kitchen Salamander-PC3 - R6Document1 pageKitchen Burner With Oven - PC1 - R4 Kitchen Double Deep Fat Fryer-PC2 - R5 Kitchen Salamander-PC3 - R6Alvaajid SaleemNo ratings yet
- S.No. Circuit No. Breaker Type Cable SizeDocument4 pagesS.No. Circuit No. Breaker Type Cable SizeAlvaajid SaleemNo ratings yet
- Hydro Pneumatic SystemDocument8 pagesHydro Pneumatic SystemAlvaajid SaleemNo ratings yet
- Appliances Layout: E D C B F G H ADocument1 pageAppliances Layout: E D C B F G H AAlvaajid SaleemNo ratings yet
- Carrier - HAP Flyer Aug10Document2 pagesCarrier - HAP Flyer Aug10Alvaajid SaleemNo ratings yet
- Excel Shortcut ListDocument1 pageExcel Shortcut ListpravinsuryaNo ratings yet
- SalerioDocument28 pagesSalerioRizqaFebrilianyNo ratings yet
- Sony dsr-45 45p (ET)Document305 pagesSony dsr-45 45p (ET)Raul Sanchez Peralta100% (1)
- User'S Manual: Sysdrive 3G3FvDocument401 pagesUser'S Manual: Sysdrive 3G3FvdesmauroNo ratings yet
- Action in The Event of Faults: Operating and Maintenance InstructionsDocument4 pagesAction in The Event of Faults: Operating and Maintenance InstructionsAnonymous 1mkExF2CbnNo ratings yet
- Mechanical and Electrical SystemsDocument272 pagesMechanical and Electrical SystemsWyncie CariñoNo ratings yet
- Liberty MPA-4500 Owners ManualDocument8 pagesLiberty MPA-4500 Owners ManualOppie51No ratings yet
- Thytronic Manual Na016-2017Document70 pagesThytronic Manual Na016-2017Ricardo Astocondor Rabanal100% (1)
- Generator Protection RelayDocument195 pagesGenerator Protection Relayvaksreedharan100% (1)
- XX55 Data Sheet PDFDocument2 pagesXX55 Data Sheet PDFbillxuNo ratings yet
- Allen: Subjective AssignmentDocument2 pagesAllen: Subjective AssignmentAnant DwivediNo ratings yet
- Lithium-Ion GuideDocument68 pagesLithium-Ion GuideVasyaNo ratings yet
- Elco Power CapacitorDocument2 pagesElco Power CapacitorFrancis SalviejoNo ratings yet
- HVDC Light ExperiencesDocument9 pagesHVDC Light ExperiencesAnjeliana HalohoNo ratings yet
- Diode Laser ReportDocument10 pagesDiode Laser ReportBerke RickettiNo ratings yet
- Mosfet Irf530Document8 pagesMosfet Irf530Marcos MillerNo ratings yet
- Infineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnDocument29 pagesInfineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnSuman SahaNo ratings yet
- Electrical Machine PDFDocument2 pagesElectrical Machine PDFAmish TankariyaNo ratings yet
- 1946 20phonographDocument4 pages1946 20phonographnewyork167No ratings yet
- Dos & Donts in WeldingDocument19 pagesDos & Donts in Weldingkumaraswamy.kNo ratings yet
- DSP QuestionDocument1 pageDSP QuestionVasanthLogarajLNo ratings yet
- CT NotesDocument227 pagesCT NotesAnonymous ODLmPN5g100% (3)
- DC Generator ProjectDocument10 pagesDC Generator ProjectMuhammad Asif Iqbal43% (7)
- Standard Operating Procedure MaintenanceDocument6 pagesStandard Operating Procedure MaintenancePADCL100% (1)
- CPDprogram ELECTRICALENG-32919 PDFDocument102 pagesCPDprogram ELECTRICALENG-32919 PDFJurgen Robert TumlosNo ratings yet
- EEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttDocument16 pagesEEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttMohd Mohsin KhanNo ratings yet
- Module Fizik Form 4 2013 Printing PotraitDocument404 pagesModule Fizik Form 4 2013 Printing PotraitMuis MuliaNo ratings yet
- SW Darth Vader Voice ChangerDocument2 pagesSW Darth Vader Voice ChangerJose A Rothe BNo ratings yet
- Atv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFDocument25 pagesAtv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFRata IonNo ratings yet
- Ohms Law 2 StepsDocument1 pageOhms Law 2 StepsIsaiah WillisNo ratings yet
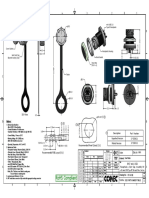
- Rohs Compliant: NotesDocument1 pageRohs Compliant: NotesRamNo ratings yet







![[24]A Duty Ratio Control Strategy to Reduce Both Torque and Flux Ripples of DTC for Permanent Magnet Synchronous Machines](https://imgv2-1-f.scribdassets.com/img/document/719350176/149x198/9c608f0c1e/1712071970?v=1)