You might also like
- Summer Internship Completion Certificate FormatDocument1 pageSummer Internship Completion Certificate FormatNavneet Gupta75% (12)
- UntitledDocument880 pagesUntitledmahdi beheshti100% (1)
- Getting Started With Stm32f103c8 With MbedSTLink V PDFDocument6 pagesGetting Started With Stm32f103c8 With MbedSTLink V PDFkyaw phone htetNo ratings yet
- Statement of Account: State Bank of IndiaDocument6 pagesStatement of Account: State Bank of Indiashinde rushiNo ratings yet
- Manual KCM LLL KtronDocument116 pagesManual KCM LLL KtronRodrigo FogaçaNo ratings yet
- Modeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design MethodsDocument8 pagesModeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design Methodskyaw phone htetNo ratings yet
- Basic Calculus Q4 Week 2 Module 10 CathDocument12 pagesBasic Calculus Q4 Week 2 Module 10 CathLee Marck SeriosNo ratings yet
- The Matlab Toolbox For Modeling Complex Mechanisms: I. PająkDocument17 pagesThe Matlab Toolbox For Modeling Complex Mechanisms: I. PająkDaniel SandriaNo ratings yet
- BafaDocument87 pagesBafaJosue Munoz GuerraNo ratings yet
- Automatic Deployment of Distributed Teams of Robots From Temporal Logic Motion SpecificationsDocument14 pagesAutomatic Deployment of Distributed Teams of Robots From Temporal Logic Motion SpecificationsAnamaria HutuleacNo ratings yet
- 5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyDocument7 pages5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologySasha NarvaezNo ratings yet
- Kinematic Model of The Scorbot 4PC Manipulator Implemented in Matlab's GuideDocument18 pagesKinematic Model of The Scorbot 4PC Manipulator Implemented in Matlab's Guidejorluak1987No ratings yet
- 5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyDocument7 pages5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyChristian Ismaël Tcheutchoua TakamNo ratings yet
- MORLAB - A Model Order Reduction Framework in MATLAB and OctaveDocument10 pagesMORLAB - A Model Order Reduction Framework in MATLAB and OctaveKb NguyenNo ratings yet
- Nonlinear Programming With Applications To Production ProcessesDocument21 pagesNonlinear Programming With Applications To Production ProcessesAisha AkreyiNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- Modeling and Control of 2-DOF Robot Arm: November 2018Document9 pagesModeling and Control of 2-DOF Robot Arm: November 2018Lavinia CuldaNo ratings yet
- Comparison Between Standard and Modified Denavit-HDocument11 pagesComparison Between Standard and Modified Denavit-HmacacoNo ratings yet
- Dynamic Modelling of Differential-Drive Mobile RobotsDocument7 pagesDynamic Modelling of Differential-Drive Mobile RobotsMichael Mays100% (1)
- Cartesian Trajectory Based Control of Dobot Robot: October 2019Document12 pagesCartesian Trajectory Based Control of Dobot Robot: October 2019raniahawachiiNo ratings yet
- CFD-SOLVERDocument16 pagesCFD-SOLVERasvenesekarNo ratings yet
- Sympy: Definite Integration Via Integration in The Complex Plane ProposalDocument6 pagesSympy: Definite Integration Via Integration in The Complex Plane ProposalrizgarmellaNo ratings yet
- Comparative Study of Different Root Location Methods Using MATLAB ProgramDocument7 pagesComparative Study of Different Root Location Methods Using MATLAB ProgramSebas MatuteNo ratings yet
- Abstraction PDFDocument18 pagesAbstraction PDFSaleem MokbelNo ratings yet
- FANUC 200ib Robot DescriptionDocument5 pagesFANUC 200ib Robot DescriptionAnurag KesariNo ratings yet
- SVRDocument7 pagesSVRDamián TamburiNo ratings yet
- Aeletters 2023 8 2 2Document8 pagesAeletters 2023 8 2 2miskoscribdNo ratings yet
- wileyNJD AMADocument16 pageswileyNJD AMAAlanNo ratings yet
- Industrial Robot Models Designing and Analysis With Application of Matlab SoftwareDocument8 pagesIndustrial Robot Models Designing and Analysis With Application of Matlab SoftwareMahavir ChavdaNo ratings yet
- Flobaroid PDFDocument11 pagesFlobaroid PDFAyman DamounNo ratings yet
- Quantum Algorithm Design Techniques and ApplicationsDocument79 pagesQuantum Algorithm Design Techniques and ApplicationsAddy EmmanuelNo ratings yet
- FullDocument196 pagesFullbrenon coronelNo ratings yet
- Manip Serial KinDocument30 pagesManip Serial KinTruc Nguyen TienNo ratings yet
- Recursive dynamics solver (ReDySim) efficiently simulates multibody systemsDocument6 pagesRecursive dynamics solver (ReDySim) efficiently simulates multibody systemsJorge Renato Chirinos QuiñonezNo ratings yet
- 1971 Strips PDFDocument20 pages1971 Strips PDFLeonardo MatteraNo ratings yet
- Gate-Level Synthesis of Boolean Functions Using Binary Multiplexers and Genetic ProgrammingDocument8 pagesGate-Level Synthesis of Boolean Functions Using Binary Multiplexers and Genetic Programmingbabypaul4321No ratings yet
- Mathematical Optimization in Robotics Towards AutoDocument43 pagesMathematical Optimization in Robotics Towards AutoMimi mariyamNo ratings yet
- LIBLINEAR - A Library For Large Linear ClassificationDocument4 pagesLIBLINEAR - A Library For Large Linear ClassificationJônatas Oliveira SilvaNo ratings yet
- 2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsDocument8 pages2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsThanh Hai NguyenNo ratings yet
- Thesis Bat AlgorithmDocument8 pagesThesis Bat Algorithmogjbvqvcf100% (2)
- Cooperative Distributed Source Seeking by Multiple Robots: Algorithms and ExperimentsDocument11 pagesCooperative Distributed Source Seeking by Multiple Robots: Algorithms and ExperimentsAnjireddy ThatiparthyNo ratings yet
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocument8 pagesIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNo ratings yet
- Simulating Electrohydraulic Soft Actuator Assemblies Via Reduced Order ModelingDocument8 pagesSimulating Electrohydraulic Soft Actuator Assemblies Via Reduced Order Modelingblrrrgh333No ratings yet
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason ANo ratings yet
- Towards Hybrid EaDocument17 pagesTowards Hybrid EakadaNo ratings yet
- Modeling Puma Robot Using MatlabDocument3 pagesModeling Puma Robot Using MatlabJulio Luis Guzman MarañonNo ratings yet
- Watershed Algorithm Implementations ReviewDocument15 pagesWatershed Algorithm Implementations Reviewanon_86753883No ratings yet
- Multibody Approach Matlab GUI For Kinematic and Dynamic Analysis of Planar MechanismsDocument10 pagesMultibody Approach Matlab GUI For Kinematic and Dynamic Analysis of Planar MechanismsAlejandro Martinez ANo ratings yet
- Analysis and Modelling of Rotational Systems With The Modyfit ApplicationDocument8 pagesAnalysis and Modelling of Rotational Systems With The Modyfit ApplicationAlfredo ZepedaNo ratings yet
- Evolutionary Algorithms Optimize Robotic System DesignDocument7 pagesEvolutionary Algorithms Optimize Robotic System DesignMohsen PeykaranNo ratings yet
- Design and Kinematic Modeling of Constant Curvature Continuum Robots A ReviewDocument57 pagesDesign and Kinematic Modeling of Constant Curvature Continuum Robots A ReviewAkshyaNo ratings yet
- ROBOTKINEMATICSDocument26 pagesROBOTKINEMATICSsohamx2505No ratings yet
- Degrees of FreedomDocument9 pagesDegrees of FreedomAsheesh SharmaNo ratings yet
- Ciao AlgorithmDocument13 pagesCiao AlgorithmDiegoHenaoLeonNo ratings yet
- Student Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersDocument33 pagesStudent Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersPruebaNo ratings yet
- 5th International Congress on Multi-Physics SimulationsDocument10 pages5th International Congress on Multi-Physics SimulationsoguierNo ratings yet
- The Finite Element Methods - Wiley Encyclopedia of Computer Science and EngineeringDocument13 pagesThe Finite Element Methods - Wiley Encyclopedia of Computer Science and Engineeringrosa alacoteNo ratings yet
- An Efficient FastSLAM Algorithm For Generating Maps of Large-Scale CyclicDocument7 pagesAn Efficient FastSLAM Algorithm For Generating Maps of Large-Scale CycliceetahaNo ratings yet
- Relational Approach to Compiling Sparse Matrix CodeDocument16 pagesRelational Approach to Compiling Sparse Matrix Codemmmmm1900No ratings yet
- Structured Contact Force Optimization For Kino-DynDocument9 pagesStructured Contact Force Optimization For Kino-DynpepeNo ratings yet
- Wrapping Multi-Bond Graphs: A Structured Approach To Modeling Complex Multi-Body DynamicsDocument37 pagesWrapping Multi-Bond Graphs: A Structured Approach To Modeling Complex Multi-Body DynamicsantoinenoelNo ratings yet
- A Method With Inertial Extrapolation Step For Convex Constrained Monotone EquationsDocument25 pagesA Method With Inertial Extrapolation Step For Convex Constrained Monotone EquationsCarlos TavaresNo ratings yet
- CSTR LMPC Vs NMPCDocument6 pagesCSTR LMPC Vs NMPCgverma9461No ratings yet
- 0 LipschitzDocument7 pages0 LipschitzLaura OsmanNo ratings yet
- ObbDocument27 pagesObbSachin GNo ratings yet
- From Dimension-Free Matrix Theory to Cross-Dimensional Dynamic SystemsFrom EverandFrom Dimension-Free Matrix Theory to Cross-Dimensional Dynamic SystemsNo ratings yet
- Velocity and Acceleration DiagramsDocument31 pagesVelocity and Acceleration Diagramsjohn_max03No ratings yet
- Vol5 Iss17 2363-2374 Design and Implementation A Ball BaDocument12 pagesVol5 Iss17 2363-2374 Design and Implementation A Ball Bakyaw phone htetNo ratings yet
- TrigDocument2 pagesTrigkyaw phone htetNo ratings yet
- Velocity and Acceleration DiagramsDocument31 pagesVelocity and Acceleration Diagramsjohn_max03No ratings yet
- Instantaneous Centre Method for Analyzing MechanismsDocument32 pagesInstantaneous Centre Method for Analyzing Mechanismskyaw phone htetNo ratings yet
- Arduino L298 Shield SCH PDFDocument1 pageArduino L298 Shield SCH PDFkyaw phone htetNo ratings yet
- Isrr 05Document10 pagesIsrr 05kyaw phone htetNo ratings yet
- Introduction To MATLAB: Violeta Ivanova, Ph.D. MIT Academic ComputingDocument24 pagesIntroduction To MATLAB: Violeta Ivanova, Ph.D. MIT Academic ComputingvijaybhatnNo ratings yet
- MekanDocument5 pagesMekankyaw phone htetNo ratings yet
- BallbotTransition ICRA. 2009Document6 pagesBallbotTransition ICRA. 2009kyaw phone htetNo ratings yet
- Linkage 3.10: User's GuideDocument75 pagesLinkage 3.10: User's Guideluisbmwm6No ratings yet
- TrigDocument2 pagesTrigkyaw phone htetNo ratings yet
- Kinematic Matlab HelpDocument201 pagesKinematic Matlab Helpkush_mech9657No ratings yet
- KG English Sai 3Document6 pagesKG English Sai 3kyaw phone htetNo ratings yet
- MechAnalyzer V4 UserManualDocument13 pagesMechAnalyzer V4 UserManualMECANISMOS ufbaNo ratings yet
- Control and Design of Robotic Arm3Document7 pagesControl and Design of Robotic Arm3kyaw phone htetNo ratings yet
- Design Simulation and Fabrication of A 5 Axis Robot ArmDocument160 pagesDesign Simulation and Fabrication of A 5 Axis Robot ArmBruno Roberto BaumgartnerNo ratings yet
- GIM Software Tutorial: Kinematic Analysis and Motion SimulationDocument26 pagesGIM Software Tutorial: Kinematic Analysis and Motion Simulationserb cutleyNo ratings yet
- BallbotDocument10 pagesBallbotkyaw phone htetNo ratings yet
- GIM Software Tutorial: Kinematic Analysis and Motion SimulationDocument26 pagesGIM Software Tutorial: Kinematic Analysis and Motion Simulationserb cutleyNo ratings yet
- MATLAB animatedPlotsTutorialArmin PDFDocument28 pagesMATLAB animatedPlotsTutorialArmin PDFkyaw phone htetNo ratings yet
- Mathematical Modeling With Matlab Products: © 2011 The Mathworks, IncDocument25 pagesMathematical Modeling With Matlab Products: © 2011 The Mathworks, Inckyaw phone htetNo ratings yet
- MATLAB TutorialDocument33 pagesMATLAB Tutorialkyaw phone htetNo ratings yet
- Uarm Swift ProDocument4 pagesUarm Swift Prokyaw phone htetNo ratings yet
- PMDCMotor Modelingand Parameter Identificationfor Control PurposeDocument6 pagesPMDCMotor Modelingand Parameter Identificationfor Control Purposekyaw phone htetNo ratings yet
- Detailed Table of ContentsDocument9 pagesDetailed Table of Contentsభుక్య వెంకటేష్No ratings yet
- ControlDocument16 pagesControlkyaw phone htetNo ratings yet
- Asphere Metrology: Options For Measuring Aspheric LensesDocument11 pagesAsphere Metrology: Options For Measuring Aspheric LensesWNo ratings yet
- 6 Axis Breakout Board Wiring and SetupDocument5 pages6 Axis Breakout Board Wiring and SetupJalaj ChhalotreNo ratings yet
- SpecificationsDocument4 pagesSpecificationsBawantha Prasad MihirangaNo ratings yet
- Annex E - Financial Offer Form - FinalDocument3 pagesAnnex E - Financial Offer Form - FinalMerito MhlangaNo ratings yet
- 9Document36 pages9vscolegit shoppeNo ratings yet
- Mathematical LogicDocument224 pagesMathematical LogickauluzavanessaNo ratings yet
- Mos HellDocument4 pagesMos HellPasindu SilvaNo ratings yet
- SRX SFP 10ge Dac 1MDocument7 pagesSRX SFP 10ge Dac 1MAssem SamirNo ratings yet
- Standard Operating Procedures Emergency Eyewash AND Safety ShowersDocument7 pagesStandard Operating Procedures Emergency Eyewash AND Safety ShowersShital 2No ratings yet
- Video Games - Checklist, Research #1 and 2, Rubric, and TimelineDocument6 pagesVideo Games - Checklist, Research #1 and 2, Rubric, and Timelinefin vionNo ratings yet
- 16V2000 Detroit W5Document2 pages16V2000 Detroit W5Rendy Chavez LesmanaNo ratings yet
- Harmonic Patterns: Guides To Profitable TradingDocument7 pagesHarmonic Patterns: Guides To Profitable TradingalokNo ratings yet
- Construction Management LecturesDocument8 pagesConstruction Management LecturesJosua MenisNo ratings yet
- Organizational Theory Quiz 1Document1 pageOrganizational Theory Quiz 1Shabana NaveedNo ratings yet
- Unit 4 (C)Document19 pagesUnit 4 (C)dharmeshNo ratings yet
- Qlassic Score Exercise FormDocument1 pageQlassic Score Exercise FormMarkjue14 Azizul100% (1)
- Python Regular Expressions (RegEx) Cheat SheetDocument4 pagesPython Regular Expressions (RegEx) Cheat SheetbabjeereddyNo ratings yet
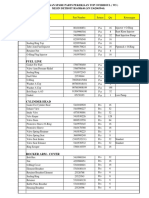
- Gas Turbine Tooling List TTS - Oi - 037Document9 pagesGas Turbine Tooling List TTS - Oi - 037rana usmanNo ratings yet
- DS-2CD2083G0-I: 8 MP Outdoor IR Fixed Bullet CameraDocument3 pagesDS-2CD2083G0-I: 8 MP Outdoor IR Fixed Bullet CameraRosemarie JimenezNo ratings yet
- Final Report For Research PaperDocument55 pagesFinal Report For Research PaperAnshu PandeyNo ratings yet
- Seminar: Predictive AnalyticsDocument10 pagesSeminar: Predictive Analyticssamiksha ingoleNo ratings yet
- Vb2012me Preview PDFDocument39 pagesVb2012me Preview PDFsomaliyow17No ratings yet
- DP Go 3Document2 pagesDP Go 3Ajeet KumarNo ratings yet
- 1623917396609-Model Qsns On Comp - GroundDocument10 pages1623917396609-Model Qsns On Comp - Groundrupakdutta158No ratings yet
- Ryobi 18 Volt Impact Wrench Model Number P261 Repair SheetDocument4 pagesRyobi 18 Volt Impact Wrench Model Number P261 Repair SheetRicardo Ran Pos100% (1)