You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- QDB 15 Electrics & ElectronicsDocument27 pagesQDB 15 Electrics & ElectronicsKueh Chew Chai88% (8)
- Parts Manual: Generator SetDocument84 pagesParts Manual: Generator SetJames Scott Valderrama Risco100% (5)
- VGB-S-002-05-2015-10-EN (Public License)Document52 pagesVGB-S-002-05-2015-10-EN (Public License)Mohamed Zaghloul100% (1)
- Tips On Calculating Frequency ResponseDocument10 pagesTips On Calculating Frequency ResponseMohamed ZaghloulNo ratings yet
- Tips On Calculating Frequency ResponseDocument10 pagesTips On Calculating Frequency ResponseMohamed ZaghloulNo ratings yet
- 4456.srty Ession HW PDFDocument1 page4456.srty Ession HW PDFMohamed ZaghloulNo ratings yet
- Boq PDFDocument1 pageBoq PDFMohamed ZaghloulNo ratings yet
- 4.session HWDocument1 page4.session HWMohamed ZaghloulNo ratings yet
- 3.session NotesDocument1 page3.session NotesMohamed ZaghloulNo ratings yet
- Adams 1948Document8 pagesAdams 1948Mohamed ZaghloulNo ratings yet
- Aquatech FEWADocument6 pagesAquatech FEWAMohamed ZaghloulNo ratings yet
- Aquatech FEWADocument6 pagesAquatech FEWAMohamed ZaghloulNo ratings yet
- Preface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFDocument3 pagesPreface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFMohamed ZaghloulNo ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- Pages From SYNCHRONOUS GENERATORS-2Document3 pagesPages From SYNCHRONOUS GENERATORS-2Mohamed ZaghloulNo ratings yet
- vid46KTH VU1 L&docid PDFDocument1 pagevid46KTH VU1 L&docid PDFMohamed ZaghloulNo ratings yet
- Vid 46KTH VU1 L&docid 46KTH ALMA PDFDocument1 pageVid 46KTH VU1 L&docid 46KTH ALMA PDFMohamed ZaghloulNo ratings yet
- Preface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFDocument3 pagesPreface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFMohamed ZaghloulNo ratings yet
- Preface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFDocument3 pagesPreface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFMohamed ZaghloulNo ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- DFGDocument5 pagesDFGMohamed ZaghloulNo ratings yet
- From 10.11648.j.eas.20180301.12-2Document2 pagesFrom 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- PTC 20.1Document57 pagesPTC 20.1Mohamed ZaghloulNo ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- Preface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFDocument3 pagesPreface - 2019 - Modern Aspects of Power System Frequency Stability and Control PDFMohamed ZaghloulNo ratings yet
- PTC-20 1 PDFDocument57 pagesPTC-20 1 PDFMohamed ZaghloulNo ratings yet
- 2 Energy ABDocument120 pages2 Energy ABMohamed ZaghloulNo ratings yet
- Licensed by Information Handling Services Licensed by Information Handling ServicesDocument19 pagesLicensed by Information Handling Services Licensed by Information Handling ServicesallokotNo ratings yet
- En 5230 5225 5222 QNGDocument4 pagesEn 5230 5225 5222 QNGgh hombreNo ratings yet
- PTC 20.1 Asme PDFDocument57 pagesPTC 20.1 Asme PDFMohamed ZaghloulNo ratings yet
- Onan Marine QD 80-99 KW Generator For MarineDocument2 pagesOnan Marine QD 80-99 KW Generator For MarineAlbertoNo ratings yet
- GJR50 Ricardo Motor GensetDocument3 pagesGJR50 Ricardo Motor Gensetahmet karakayaNo ratings yet
- CAT C18 750kW SubmittalDocument38 pagesCAT C18 750kW SubmittalOscar Javier Ayala GutierrezNo ratings yet
- IAM Unit 4 MCQDocument4 pagesIAM Unit 4 MCQVishal SawantNo ratings yet
- Diesel Engine - Technical ManualDocument356 pagesDiesel Engine - Technical Manualجمال مصالحه100% (5)
- POWER YOUR FUTURE WITH PORTABLE AND DIESEL GENERATING SETSDocument44 pagesPOWER YOUR FUTURE WITH PORTABLE AND DIESEL GENERATING SETSKadir Koray BozyelNo ratings yet
- CPL 46 & BFC 12 Electrics TestDocument3 pagesCPL 46 & BFC 12 Electrics TestAnushkaa DesaiNo ratings yet
- STAMFORD Alternator Range Parts CatalogueDocument168 pagesSTAMFORD Alternator Range Parts CatalogueJESUSNo ratings yet
- User Manual: HGM6400 Automatic Genset Controller (With J1939 Interface)Document37 pagesUser Manual: HGM6400 Automatic Genset Controller (With J1939 Interface)nhocti007No ratings yet
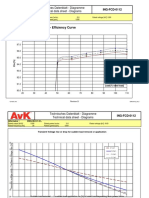
- Wirkungsgrad-Kennlinie - Efficiency Curve: Technisches Datenblatt - Diagramme Technical Data Sheet - DiagramsDocument8 pagesWirkungsgrad-Kennlinie - Efficiency Curve: Technisches Datenblatt - Diagramme Technical Data Sheet - DiagramsjohnsonNo ratings yet
- Multiple Choice Questions MachinesDocument11 pagesMultiple Choice Questions MachinesrajmanaNo ratings yet
- Industrial Alternator LSA 51.2Document12 pagesIndustrial Alternator LSA 51.2Mahmoud_ElAghouryNo ratings yet
- Alternator Temperature RiseDocument9 pagesAlternator Temperature RiseAceng Daud100% (1)
- Ac Machines ModuleDocument42 pagesAc Machines ModuleFranzon MelecioNo ratings yet
- Dca 400 Ssi DatasheetDocument4 pagesDca 400 Ssi DatasheetLevi ColsaNo ratings yet
- JCB 9803-9700Document72 pagesJCB 9803-9700Marcin MarszałekNo ratings yet
- ELE290 Chapter 6Document21 pagesELE290 Chapter 6imfendiNo ratings yet
- Sctevt 5th Sem Electrical SyllabusDocument22 pagesSctevt 5th Sem Electrical SyllabusAshNo ratings yet
- Basic Electrical QuestionDocument4 pagesBasic Electrical QuestionSumanto BarmanNo ratings yet
- EE Assignment 23-24 Sem 1Document7 pagesEE Assignment 23-24 Sem 1Triggered CreatorNo ratings yet
- rr220402 Electrical TechnologyDocument8 pagesrr220402 Electrical TechnologySRINIVASA RAO GANTANo ratings yet
- Relays PresentationDocument32 pagesRelays PresentationbijoyNo ratings yet
- Permanent Magnet Synchronous MachineDocument7 pagesPermanent Magnet Synchronous MachineSantiago DavidNo ratings yet
- Load Sharing Module WoodwardDocument36 pagesLoad Sharing Module WoodwardgusgifNo ratings yet
- Kohler 150RZGB Spec SheetDocument4 pagesKohler 150RZGB Spec SheetRomanvi1980No ratings yet
- Tools Ko TotDocument11 pagesTools Ko TotElaica Joy PuadaNo ratings yet
- Alternator QuizzDocument1 pageAlternator QuizzMPENDULO MABILANo ratings yet
- Reference Book 2014 05 19Document84 pagesReference Book 2014 05 19leoNo ratings yet