You might also like
- Global Positioning SystemDocument10 pagesGlobal Positioning SystemAnkit GuptaNo ratings yet
- Principle of Functioning of DGPS & ETSDocument64 pagesPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- How DGPS Works to Improve GPS Accuracy Under 5 MetersDocument2 pagesHow DGPS Works to Improve GPS Accuracy Under 5 MetersAimanNo ratings yet
- 5Document20 pages5Ayesha ImranNo ratings yet
- CVL111 LM2 5Document20 pagesCVL111 LM2 5GoggiNo ratings yet
- Global Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolDocument25 pagesGlobal Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolTheyen NaidooNo ratings yet
- Lecture 4 - Introduction To Global Positioning SystemDocument40 pagesLecture 4 - Introduction To Global Positioning SystembuhlyunbarterNo ratings yet
- Real-Time Kinematic and Differential GPS: PrintDocument13 pagesReal-Time Kinematic and Differential GPS: PrintBijay Krishna Das100% (1)
- GPS Seminar Report Provides Overview of Global Positioning SystemDocument13 pagesGPS Seminar Report Provides Overview of Global Positioning SystemRAJESH KAMBOJNo ratings yet
- Global Positioning System: Introduction ToDocument58 pagesGlobal Positioning System: Introduction ToYasir Malik0% (1)
- Geog 204 Lecture 5 GPS 2014Document27 pagesGeog 204 Lecture 5 GPS 2014Joseph ZotooNo ratings yet
- Avleen GPS 2Document27 pagesAvleen GPS 2saabi singhNo ratings yet
- 3.1-Intro +to GPSDocument90 pages3.1-Intro +to GPSdunglxNo ratings yet
- What Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsDocument43 pagesWhat Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsghasemighasemiNo ratings yet
- GpsDocument22 pagesGpsSujan Singh100% (1)
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisNo ratings yet
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- Chapter 5Document51 pagesChapter 5samueladdissu92No ratings yet
- Introduction To Global Positioning SystemDocument31 pagesIntroduction To Global Positioning Systemdanyar.233698No ratings yet
- GPS Triangulation ProcedureDocument43 pagesGPS Triangulation Procedurehim92No ratings yet
- An Introduction To GNSSDocument99 pagesAn Introduction To GNSSjustine john acabal100% (1)
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNo ratings yet
- To GPSDocument17 pagesTo GPSBhushit Dave ੴNo ratings yet
- CE-321 Gps - Slides - EtcDocument129 pagesCE-321 Gps - Slides - EtcShubham BansalNo ratings yet
- 1. GPSDocument21 pages1. GPSMike MSBNo ratings yet
- Gps NotesDocument49 pagesGps Notesjags3002No ratings yet
- GPS ReportDocument13 pagesGPS Reportavinashjha99No ratings yet
- Global Positioning SystemDocument6 pagesGlobal Positioning SystemAshutosh SharmaNo ratings yet
- Introduction to GPS FundamentalsDocument24 pagesIntroduction to GPS FundamentalsShane IceNo ratings yet
- 10 - GpsDocument19 pages10 - GpsghadasalahNo ratings yet
- Chap 2 GPSDocument41 pagesChap 2 GPSLayani KatinNo ratings yet
- GPS Systems ExplainedDocument4 pagesGPS Systems ExplainedMMhammed AlrowailyNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: Abstractasjad12No ratings yet
- Duhok Polytechnic University: Global Position System (GPS)Document7 pagesDuhok Polytechnic University: Global Position System (GPS)Xogr BargarayNo ratings yet
- A Report On Global Positioning SystemDocument18 pagesA Report On Global Positioning SystemRahul WaliaNo ratings yet
- GPS Error and MBES DataDocument12 pagesGPS Error and MBES DataFajar RNo ratings yet
- Unit 2 - GNSSDocument33 pagesUnit 2 - GNSSThe SinghNo ratings yet
- Augmentation Systems For GPSDocument11 pagesAugmentation Systems For GPSAboody AL-ghamdyNo ratings yet
- Introduction To Global Positioning Systems (GPS) : Prepared For USDADocument39 pagesIntroduction To Global Positioning Systems (GPS) : Prepared For USDASaChibvuri JeremiahNo ratings yet
- How GPS Works: A Concise GuideDocument20 pagesHow GPS Works: A Concise GuideJanardanNo ratings yet
- Chapter 5-Global Positioning SystemDocument53 pagesChapter 5-Global Positioning SystemFaran MasoodNo ratings yet
- Hyperboloid MultilaterationDocument6 pagesHyperboloid MultilaterationHazel CordanoNo ratings yet
- GNSSDocument27 pagesGNSSg78163131No ratings yet
- Please Explain How GPS System Work. Explainin Term of TrilaterationDocument6 pagesPlease Explain How GPS System Work. Explainin Term of TrilaterationMohammad Fajri Raazaq RamadhanNo ratings yet
- Seminar On GPS: By, PruthwinDocument24 pagesSeminar On GPS: By, PruthwinPruthwinNo ratings yet
- Q1 What Is The Purpose of GPS?: NavigationDocument2 pagesQ1 What Is The Purpose of GPS?: NavigationAboody AL-ghamdyNo ratings yet
- By: Sir Umair Rasheed: The University of LahoreDocument41 pagesBy: Sir Umair Rasheed: The University of LahoreSuman AgarwalNo ratings yet
- GPS System: Three Components of The GPSDocument6 pagesGPS System: Three Components of The GPSAnonymous JEzHIEUNNo ratings yet
- Gps Overview Apr 04Document24 pagesGps Overview Apr 04Pavan Chavariya100% (1)
- Lecture 6Document26 pagesLecture 6abdicasis rashidNo ratings yet
- EGNOS Virtual Reference StationsDocument13 pagesEGNOS Virtual Reference StationsOlivier LaylyNo ratings yet
- GPS Receiver: How it Works & ApplicationsDocument17 pagesGPS Receiver: How it Works & Applicationsmanjeet kumarNo ratings yet
- Gps Overview Apr 04Document24 pagesGps Overview Apr 04Md ZaheerNo ratings yet
- GPS TechnologyDocument8 pagesGPS TechnologyKunnam Hanuma ReddyNo ratings yet
- Electronic Navigation AidsDocument25 pagesElectronic Navigation AidsKingsley Egbe100% (1)
- 1.1 What Is GPS?: A. Space SegmentDocument11 pages1.1 What Is GPS?: A. Space SegmentReiger RoyalNo ratings yet
- Mod V Adv SurvDocument35 pagesMod V Adv SurvSouravNo ratings yet
- Everything You Need to Know About the Global Positioning System (GPSDocument21 pagesEverything You Need to Know About the Global Positioning System (GPSskyrunmanNo ratings yet
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationRating: 1 out of 5 stars1/5 (1)
- Mobile Professionals, Inc: LTE Air InterfaceDocument21 pagesMobile Professionals, Inc: LTE Air InterfaceNishant TiwariNo ratings yet
- 01-02 Installation ProcessDocument9 pages01-02 Installation ProcessNishant TiwariNo ratings yet
- Accelerating 5G DeploymentDocument34 pagesAccelerating 5G DeploymentNishant TiwariNo ratings yet
- Best Practices - 5G Timing and Synchronization: Nigel BrownlowDocument30 pagesBest Practices - 5G Timing and Synchronization: Nigel BrownlowNishant TiwariNo ratings yet
- Hindu Indian Calender 2016Document5 pagesHindu Indian Calender 2016gurunathpkNo ratings yet
- Original1.Week 2 Module 3 IRNSSDocument22 pagesOriginal1.Week 2 Module 3 IRNSSNishant TiwariNo ratings yet
- 5G NR Carrier Conformance Spec - 3GPP TS 38.521Document288 pages5G NR Carrier Conformance Spec - 3GPP TS 38.521Arun BaidyaNo ratings yet
- Mobile Professionals, Inc: LTE Air InterfaceDocument21 pagesMobile Professionals, Inc: LTE Air InterfaceNishant TiwariNo ratings yet
- Hindu Indian Calender 2016Document5 pagesHindu Indian Calender 2016gurunathpkNo ratings yet
- 5G NR Carrier Conformance Spec - 3GPP TS 38.521Document288 pages5G NR Carrier Conformance Spec - 3GPP TS 38.521Arun BaidyaNo ratings yet
- SocialDistancingAdvisorybyMOHFW PDFDocument2 pagesSocialDistancingAdvisorybyMOHFW PDFNishant TiwariNo ratings yet
- ETSI TS 123 501: 5G System Architecture For The 5G System (3GPP TS 23.501 Version 15.2.0 Release 15)Document219 pagesETSI TS 123 501: 5G System Architecture For The 5G System (3GPP TS 23.501 Version 15.2.0 Release 15)Gabriel Rodriguez GigireyNo ratings yet
- GNSSDocument18 pagesGNSSNishant TiwariNo ratings yet
- Original1.Week 2 Module 5 QZSSDocument13 pagesOriginal1.Week 2 Module 5 QZSSNishant TiwariNo ratings yet
- TIES328 Matlab1Document13 pagesTIES328 Matlab1Nishant TiwariNo ratings yet
- 3a KNNDocument26 pages3a KNNNishant TiwariNo ratings yet
- TIES328 Matlab Exercise 1: Zhdizhan@student - Jyu.fiDocument42 pagesTIES328 Matlab Exercise 1: Zhdizhan@student - Jyu.fiNacho ReyesNo ratings yet
- Foundations of Machine Learning: Module 3: Instance Based Learning and Feature ReductionDocument12 pagesFoundations of Machine Learning: Module 3: Instance Based Learning and Feature ReductionLakhyaNo ratings yet
- 3c Feature ExtractionDocument19 pages3c Feature ExtractionNishant TiwariNo ratings yet
- 3a KNNDocument26 pages3a KNNNishant TiwariNo ratings yet
- Umts OverviewDocument539 pagesUmts OverviewNishant TiwariNo ratings yet
- Foundations of Machine Learning: Module 6: Neural NetworkDocument14 pagesFoundations of Machine Learning: Module 6: Neural NetworkNishant TiwariNo ratings yet
- Cdma PDFDocument35 pagesCdma PDFNishant TiwariNo ratings yet
- Foundations of Machine Learning: Module 6: Neural NetworkDocument22 pagesFoundations of Machine Learning: Module 6: Neural NetworkNishant TiwariNo ratings yet
- Ref.5 NGN ProtocolsDocument15 pagesRef.5 NGN Protocolsharit_ec100% (1)
- GladiatorDocument12 pagesGladiatorvickyaryanNo ratings yet
- Foundations of Machine Learning: Module 3: Instance Based Learning and Feature ReductionDocument40 pagesFoundations of Machine Learning: Module 3: Instance Based Learning and Feature ReductionNishant TiwariNo ratings yet
- Volte CallsetupDocument121 pagesVolte CallsetupMenard Cruz80% (5)
- Nokia Volte Optimization - QualityDocument20 pagesNokia Volte Optimization - QualityHazem Maher83% (12)
- List of Scilab CodesDocument68 pagesList of Scilab CodesOscar Sttewe Jaehnig BarriosNo ratings yet
- Electronic Voltage Regulator R100 PDFDocument3 pagesElectronic Voltage Regulator R100 PDFOleg OrnatskyiNo ratings yet
- Competency Standards Electrician Level II IVDocument47 pagesCompetency Standards Electrician Level II IVSheela AliNo ratings yet
- MX711 MX81x Machine Type 7463Document834 pagesMX711 MX81x Machine Type 7463Cristian Leonardo Lalangui Ruiz0% (1)
- CRODocument29 pagesCROemilyNo ratings yet
- B360 Aorus Gaming 3 Wifi B360 Aorus Gaming 3: User's ManualDocument44 pagesB360 Aorus Gaming 3 Wifi B360 Aorus Gaming 3: User's ManualNueva Imagen La Consentida de AmericaNo ratings yet
- UCE-CT220L FAULT LOCATOR USER MANUALDocument10 pagesUCE-CT220L FAULT LOCATOR USER MANUALtecsupport100% (2)
- 7thAnd8thSemSyllabus MEDocument67 pages7thAnd8thSemSyllabus MEahmadNo ratings yet
- Monochrome LedsDocument1 pageMonochrome Ledsy lNo ratings yet
- NV9 Spectral 5Document2 pagesNV9 Spectral 5Bogicevic DejanNo ratings yet
- Anexo 2. D103605X012 DVC6200 Instruction Manual PDFDocument104 pagesAnexo 2. D103605X012 DVC6200 Instruction Manual PDFJairo andres Guarnizo SuarezNo ratings yet
- Chemistry The Central Science NotesDocument8 pagesChemistry The Central Science Noteslucykipper100% (1)
- Unids6 Manual v100Document24 pagesUnids6 Manual v100oya27910No ratings yet
- Hyundai D6GA Engine Mechanical System PDFDocument97 pagesHyundai D6GA Engine Mechanical System PDFbrayandparavicinoNo ratings yet
- 3.3 Subtractive Synthesis: 3.3.1 Theory: Source and Modifi ErDocument15 pages3.3 Subtractive Synthesis: 3.3.1 Theory: Source and Modifi ErMafeCastro1998100% (1)
- Easy PC Clearance SaleDocument2 pagesEasy PC Clearance SaleVIRT BIZNo ratings yet
- Rotary Blower Discharge Silencer GuideDocument4 pagesRotary Blower Discharge Silencer Guidehk168No ratings yet
- All India Radio QuizDocument15 pagesAll India Radio QuizMamta100% (3)
- Sony MZ-B50 Service ManualDocument72 pagesSony MZ-B50 Service ManualDavid PiçarraNo ratings yet
- Single Output Thermostat or Humidistat Single Output Thermostat or HumidistatDocument1 pageSingle Output Thermostat or Humidistat Single Output Thermostat or HumidistatCarlos MaicanNo ratings yet
- GEA+Fillstar+LXi+ (2012) tcm25-17145 PDFDocument2 pagesGEA+Fillstar+LXi+ (2012) tcm25-17145 PDFFernando FerreiraNo ratings yet
- Service Manual FSHTV-Z60Document30 pagesService Manual FSHTV-Z60Armamndo RamirezNo ratings yet
- Pze X5 enDocument6 pagesPze X5 enosiel limaNo ratings yet
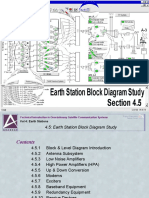
- Earth Station Block Diagram Study: Section 5Document213 pagesEarth Station Block Diagram Study: Section 5Extreme DaysNo ratings yet
- ManualPioneer (Deh 4350ub) (Deh 3350ub)Document72 pagesManualPioneer (Deh 4350ub) (Deh 3350ub)Yohel LaghunaNo ratings yet
- ANSI CodesDocument12 pagesANSI CodesmgkvprNo ratings yet
- Measure Temperature of Fluids Using Thermocouples and ThermometersDocument5 pagesMeasure Temperature of Fluids Using Thermocouples and ThermometersSaad khanNo ratings yet
- Annual Market Review & Forecast: Laser WeldingDocument40 pagesAnnual Market Review & Forecast: Laser WeldingwwwpolNo ratings yet
- Wi-Fi Router Huawei E5830 EngDocument28 pagesWi-Fi Router Huawei E5830 EngMuhammad Ibnu Al KaffyNo ratings yet
- 4 Essential Features of Transformer On-Load Tap Changer OLTCDocument5 pages4 Essential Features of Transformer On-Load Tap Changer OLTCrobertoseniorNo ratings yet