You might also like
- Limit GaugesDocument29 pagesLimit GaugesMANOJ M83% (6)
- Uncertainty Analysis ofDocument10 pagesUncertainty Analysis ofEgemet SatisNo ratings yet
- Astm E448 82 R02 E02 PDFDocument40 pagesAstm E448 82 R02 E02 PDFPacifier NothingfaceNo ratings yet
- Ezm 4430Document48 pagesEzm 4430Egemet SatisNo ratings yet
- Limit GaugesDocument29 pagesLimit GaugesMANOJ M83% (6)
- Uncertainty Analysis ofDocument10 pagesUncertainty Analysis ofEgemet SatisNo ratings yet
- Uncertainty Analysis ofDocument10 pagesUncertainty Analysis ofEgemet SatisNo ratings yet
- Aggregates CatalogueDocument10 pagesAggregates CatalogueEgemet SatisNo ratings yet
- Surface Texture Metrology Services Available PDFDocument2 pagesSurface Texture Metrology Services Available PDFEgemet SatisNo ratings yet
- Segmentasyon PDFDocument1 pageSegmentasyon PDFEgemet SatisNo ratings yet
- 05 Concretes p73 112Document40 pages05 Concretes p73 112Egemet SatisNo ratings yet
- Matest Catalogue 6 Cement MortarDocument49 pagesMatest Catalogue 6 Cement MortarEgemet SatisNo ratings yet
- Astm D6926 PDFDocument6 pagesAstm D6926 PDFEgemet SatisNo ratings yet
- 05 Concretes p73 112Document40 pages05 Concretes p73 112Egemet SatisNo ratings yet
- Glukhov 2018 J. Phys.: Conf. Ser. 998 012012Document9 pagesGlukhov 2018 J. Phys.: Conf. Ser. 998 012012Egemet SatisNo ratings yet
- Analysis of Errors of The Testing Equipment For PDFDocument5 pagesAnalysis of Errors of The Testing Equipment For PDFEgemet SatisNo ratings yet
- Calibration of Digital Level PDFDocument10 pagesCalibration of Digital Level PDFEgemet SatisNo ratings yet
- Iso 11254-1 - 2000 PD Sudan 42 PDFDocument30 pagesIso 11254-1 - 2000 PD Sudan 42 PDFEgemet SatisNo ratings yet
- 3642 01Document4 pages3642 01Egemet SatisNo ratings yet
- Bachelor Project 2010: Comparison of Short Range and Long Range Laser Scanner's Accuracy DifferencesDocument27 pagesBachelor Project 2010: Comparison of Short Range and Long Range Laser Scanner's Accuracy DifferencesEgemet SatisNo ratings yet
- Analysis of Errors of The Testing Equipment For PDFDocument5 pagesAnalysis of Errors of The Testing Equipment For PDFEgemet SatisNo ratings yet
- High Accuracy Short Range Laser Meter For System Calibration and InstallationDocument8 pagesHigh Accuracy Short Range Laser Meter For System Calibration and InstallationEgemet SatisNo ratings yet
- FittingData PDFDocument10 pagesFittingData PDFRajeeb KunwarNo ratings yet
- Arazi Ölçüm Cihazları Ve Standartları PDFDocument9 pagesArazi Ölçüm Cihazları Ve Standartları PDFEgemet SatisNo ratings yet
- LVDT Calibration ProcedureDocument3 pagesLVDT Calibration ProcedureEgemet Satis100% (1)
- Jpconf5 13 092Document5 pagesJpconf5 13 092Egemet SatisNo ratings yet
- ASME B1.3-2007 ¿É ÓÊÜ SS Ç ÄÂÝÎÆ âÁ¿Ï Í .Ó ÖƺÍÃ×ÖÆÂÝÎÆ (UN¡ UNR¡ UNJ¡ MºÍMJ)Document22 pagesASME B1.3-2007 ¿É ÓÊÜ SS Ç ÄÂÝÎÆ âÁ¿Ï Í .Ó ÖƺÍÃ×ÖÆÂÝÎÆ (UN¡ UNR¡ UNJ¡ MºÍMJ)vivek_swati100% (2)
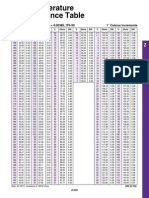
- For European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsDocument3 pagesFor European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsMary HarrisonNo ratings yet
- Ansi B 7 1 2000 PDFDocument155 pagesAnsi B 7 1 2000 PDFEgemet SatisNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Unicodebook PDFDocument73 pagesUnicodebook PDFaminerachedNo ratings yet
- Data Warehousing Interview Questions and AnswersDocument5 pagesData Warehousing Interview Questions and Answerssiva_mmNo ratings yet
- Design and Simulation of DAC On The Basis of Capacitor ArrayDocument4 pagesDesign and Simulation of DAC On The Basis of Capacitor ArrayAmitNo ratings yet
- Klasifikasi Jeruk Nipis Terhadap Tingkat Kematangan Buah Berdasarkan Fitur Warna Menggunakan K-Nearest NeighborDocument7 pagesKlasifikasi Jeruk Nipis Terhadap Tingkat Kematangan Buah Berdasarkan Fitur Warna Menggunakan K-Nearest NeighborWiLdan AdhaNo ratings yet
- GED Mathematics Training InstitDocument420 pagesGED Mathematics Training InstitRUSDIN, S.Si100% (1)
- Game CoLab - Ankit JhunjhunwalaDocument6 pagesGame CoLab - Ankit JhunjhunwalaSwapnil ChaudhariNo ratings yet
- Types of Components and Objects To Be Measur EdDocument5 pagesTypes of Components and Objects To Be Measur EdRichard SugboNo ratings yet
- Kamigakari Expansion 1 - Requiem For The God SoulDocument177 pagesKamigakari Expansion 1 - Requiem For The God SoulLuciano Júnior100% (2)
- Draft MMR Plan Report, 2016-36 Colour PDFDocument209 pagesDraft MMR Plan Report, 2016-36 Colour PDFshramanam67% (6)
- 2 F.L Annual Learning Progression By. MR Benguemmar NacerDocument4 pages2 F.L Annual Learning Progression By. MR Benguemmar NacerNouzha Akoh100% (1)
- TheMidascode PDFDocument171 pagesTheMidascode PDFJoseph Riccardo75% (4)
- Sanchez Rodrigues Et AlDocument14 pagesSanchez Rodrigues Et AlErlangga Bayu SetyawanNo ratings yet
- FlySense 250 Spec Sheet - NOV2018Document2 pagesFlySense 250 Spec Sheet - NOV2018Rich OlsonNo ratings yet
- TimeSheet To Track Worked Hours 2015Document6 pagesTimeSheet To Track Worked Hours 2015Eiger EsNo ratings yet
- Determine Your Values DR John DemartiniDocument9 pagesDetermine Your Values DR John DemartiniAmar Nath VermaNo ratings yet
- MRCP1ADocument4 pagesMRCP1Adaimad69No ratings yet
- 6587-Article Text-23111-1-10-20220829Document11 pages6587-Article Text-23111-1-10-20220829crussel amuktiNo ratings yet
- Teaching FCC To Psych - FullDocument9 pagesTeaching FCC To Psych - FullStgo NdNo ratings yet
- Iliopoulos - Radiative Corrections in Quantum Field TheoryDocument49 pagesIliopoulos - Radiative Corrections in Quantum Field Theoryfisica_musicaNo ratings yet
- Faculty Qualification BTKIT DwarahatDocument4 pagesFaculty Qualification BTKIT DwarahatSUBHASH ANURAGNo ratings yet
- Chefs ResumeDocument3 pagesChefs Resumeapi-452231230No ratings yet
- Architectural Design 1Document30 pagesArchitectural Design 1Anshe ObispoNo ratings yet
- Hyundai Robot: Manipulator Maintenance ManualDocument147 pagesHyundai Robot: Manipulator Maintenance ManualNguyenHuuĐucNo ratings yet
- Narrative ReportDocument13 pagesNarrative ReportJessa Mae Legados Villavicencio100% (1)
- Banking Value ChainDocument13 pagesBanking Value ChainAshutosh MohapatraNo ratings yet
- Pol6 - History of Pol. Thought Since 1890Document46 pagesPol6 - History of Pol. Thought Since 1890rabarber1900No ratings yet
- SOLASDocument6 pagesSOLASKarimFarghlyNo ratings yet
- NSUCh 10 FinsDocument10 pagesNSUCh 10 FinsRezwana Newaz SuroviNo ratings yet
- D 4393 - 02 RdqzotmDocument7 pagesD 4393 - 02 RdqzotmJuanNo ratings yet
- Cobit Assessment MatrixDocument14 pagesCobit Assessment MatrixGie PdNo ratings yet