You might also like
- Coefficients v1 1cDocument6 pagesCoefficients v1 1cRekha PandeyNo ratings yet
- Orifice MeterDocument6 pagesOrifice MeterGodwin PeterNo ratings yet
- Graficas TemplabilidadDocument4 pagesGraficas TemplabilidadJesusNo ratings yet
- Kurva Kalibrasi Kelas A Kurva Kalibrasi Kelas C Kurva Kalibrasi Kelas D Kurva Kalibrasi Kelas BDocument2 pagesKurva Kalibrasi Kelas A Kurva Kalibrasi Kelas C Kurva Kalibrasi Kelas D Kurva Kalibrasi Kelas BDella MeiliaNo ratings yet
- Bham Toll Plaza: AVC Class Accuracy ReportDocument1 pageBham Toll Plaza: AVC Class Accuracy ReportShubham BagadteNo ratings yet
- Site 36 FlodarDocument7 pagesSite 36 FlodarAndy LeakNo ratings yet
- Grain Size Distribution Curve by Hydrometer Method: Diameter of The ParticlesDocument1 pageGrain Size Distribution Curve by Hydrometer Method: Diameter of The ParticlesAfif AdnanNo ratings yet
- RegreSi Sederhana FEB-1Document2 pagesRegreSi Sederhana FEB-1Naa HambuNo ratings yet
- Raghav 2Document1 pageRaghav 2Piyush VermaNo ratings yet
- Fender Deflection and Load Test ResultsDocument2 pagesFender Deflection and Load Test ResultsviralisursNo ratings yet
- Laboratorio de Fìsica 2Document2 pagesLaboratorio de Fìsica 2martinezyehison544No ratings yet
- Bern Klein Bulk Sorting Abstract2Document3 pagesBern Klein Bulk Sorting Abstract2Luis Katsumoto Huere AnayaNo ratings yet
- K Maturity S Sigma Intrate Div Tau NDocument3 pagesK Maturity S Sigma Intrate Div Tau NfmurphyNo ratings yet
- Chemical Kinetics Simulator: An Interactive Graphical ApproachDocument8 pagesChemical Kinetics Simulator: An Interactive Graphical Approachnurul ismiNo ratings yet
- LED Downlight Test ReportDocument3 pagesLED Downlight Test ReportLuis Lujan ArevaloNo ratings yet
- Fox 7th ISM ch07-13Document1 pageFox 7th ISM ch07-13Ramón RamalhoNo ratings yet
- Slotted AlohaDocument7 pagesSlotted AlohaAadrika GuptaNo ratings yet
- Penggabungan AgregatDocument3 pagesPenggabungan AgregatmulyanaNo ratings yet
- Qo Δpo (psi) Qw: (cm3/min) (cm3/min)Document2 pagesQo Δpo (psi) Qw: (cm3/min) (cm3/min)Moataz El-tantawyNo ratings yet
- Uji Coba KUCDocument2 pagesUji Coba KUCAyla AdhitamaNo ratings yet
- KRPT DiagramDocument8 pagesKRPT DiagramHanisNo ratings yet
- Comparing smoothing methods and ARIMA models for time series forecastingDocument5 pagesComparing smoothing methods and ARIMA models for time series forecastingHitarth DhamsaniaNo ratings yet
- Estimation of Glucose Content From Standard Curve: Glucose Concentration ( G/ML)Document1 pageEstimation of Glucose Content From Standard Curve: Glucose Concentration ( G/ML)Hasan AnandaNo ratings yet
- Graph For Ronel2.0Document3 pagesGraph For Ronel2.0Ronel AlbanNo ratings yet
- Beam ProgramDocument10 pagesBeam ProgramAnirudh SabooNo ratings yet
- SEO-Optimized Title for Document on Rating Curve and Wall Design CalculationsDocument8 pagesSEO-Optimized Title for Document on Rating Curve and Wall Design Calculationsشوکت محمديNo ratings yet
- Kro/krw Vs SW: Perfiles de SaturacionDocument6 pagesKro/krw Vs SW: Perfiles de SaturacionEdison LduNo ratings yet
- Diagramas PXY, TXYDocument15 pagesDiagramas PXY, TXYDIANA VANESA ISLAS FUENTESNo ratings yet
- Flow (100) Flow Per Pipe Nº of Pipes O.K: Caudales en Función Del CaladoDocument1 pageFlow (100) Flow Per Pipe Nº of Pipes O.K: Caudales en Función Del CaladoarreugrasecNo ratings yet
- Cyclic Simple Shear Test: Need and ScopeDocument14 pagesCyclic Simple Shear Test: Need and ScopeMAJIDNo ratings yet
- Hasi Pretes PostestDocument3 pagesHasi Pretes PostestRany SariNo ratings yet
- TP Charege R .SMVDocument1 pageTP Charege R .SMVBelkacem BouacherineNo ratings yet
- Grain-Size Distribution Curve: Sieve Number Opening (MM) Soil Retained (G)Document3 pagesGrain-Size Distribution Curve: Sieve Number Opening (MM) Soil Retained (G)kiteflyNo ratings yet
- Wind Pressure Calculation AREA 2 FinalDocument30 pagesWind Pressure Calculation AREA 2 FinalAnkit BhadolaNo ratings yet
- Training VibrasiDocument91 pagesTraining VibrasikarimNo ratings yet
- METRADO DE MADERA CALCULATIONSDocument2 pagesMETRADO DE MADERA CALCULATIONSDaniella HernándezNo ratings yet
- Servomotors Details and Dimensions MR-J4 PSGDocument11 pagesServomotors Details and Dimensions MR-J4 PSGalen zelencicNo ratings yet
- Sieve No. Diameter (MM) Percent Passing (%) 4 4.76 100 8 2.38 100 10 2 98 20 0.84 92 40 0.42 84 60 0.25 79 100 0.149 70 200 0.074 63Document2 pagesSieve No. Diameter (MM) Percent Passing (%) 4 4.76 100 8 2.38 100 10 2 98 20 0.84 92 40 0.42 84 60 0.25 79 100 0.149 70 200 0.074 63Sha SheNo ratings yet
- Kedalaman Elektroda (M)Document6 pagesKedalaman Elektroda (M)MuslimNakAtjehNo ratings yet
- Wa0004.Document6 pagesWa0004.Tasawar HussainNo ratings yet
- Fhe Zulia ApartaestudiosDocument9 pagesFhe Zulia Apartaestudiosjuan carlos santafeNo ratings yet
- OTK 3 Latihan 3Document3 pagesOTK 3 Latihan 3Keta ReisseNo ratings yet
- Gi N Đ TK+TNDocument16 pagesGi N Đ TK+TNkha.trankhatran03No ratings yet
- د عمرو طارق شبرا الخيمه5Document1 pageد عمرو طارق شبرا الخيمه5boudyabdo102No ratings yet
- Tra Vinh Daily Report 24-05-2023Document6 pagesTra Vinh Daily Report 24-05-2023Nghĩa DuyNo ratings yet
- Simple Kriging DemoDocument6 pagesSimple Kriging Demokosaraju suhasNo ratings yet
- Acetone NuocDocument1 pageAcetone NuocBG BBNo ratings yet
- Tamiz Pasa Pasante (MM) (%) (%) : Retenido Retenido Acumulado (%) Parcial (%)Document4 pagesTamiz Pasa Pasante (MM) (%) (%) : Retenido Retenido Acumulado (%) Parcial (%)FabioAndres VelandiaNo ratings yet
- Space Programming Senior CitizenDocument2 pagesSpace Programming Senior CitizenSantieNo ratings yet
- Activity 2 (Lab Report) - Alban, Ronel D.Document6 pagesActivity 2 (Lab Report) - Alban, Ronel D.Ronel AlbanNo ratings yet
- Phase Equilibria of Acetone-2-Propanol MixtureDocument18 pagesPhase Equilibria of Acetone-2-Propanol MixtureroseNo ratings yet
- Lab 05Document8 pagesLab 05Ernesto ZavaletaNo ratings yet
- Vapour Liquid Equilibrium Data CollectionDocument51 pagesVapour Liquid Equilibrium Data CollectionMirsoNo ratings yet
- Worksheet L: Speed-Time Data For Straight TrackDocument1 pageWorksheet L: Speed-Time Data For Straight TrackNiket 6969No ratings yet
- Staticbook Quantitative Research by ExampleDocument108 pagesStaticbook Quantitative Research by ExampleKueency RoniNo ratings yet
- Diameter Berat Tertahan Berat Kumulatif Persen (%) (MM) (Gram) (Gram) Tertahan LolosDocument1 pageDiameter Berat Tertahan Berat Kumulatif Persen (%) (MM) (Gram) (Gram) Tertahan LolosSvltaNk BoNcozNo ratings yet
- 3.sieve Analysis in Fine AggregateDocument1 page3.sieve Analysis in Fine AggregateLakshithaGonapinuwalaWithanageNo ratings yet
- Hasil GC-Ms Tongkol Jagung 96%2Document13 pagesHasil GC-Ms Tongkol Jagung 96%2Abdi KaryaNo ratings yet
- QF N CompareDocument1 pageQF N CompareDeniz GülerNo ratings yet
- Mahindra SMKC CVDocument4 pagesMahindra SMKC CVMahindra DeshmukhNo ratings yet
- Invoice 4538735820Document1 pageInvoice 4538735820Mahindra DeshmukhNo ratings yet
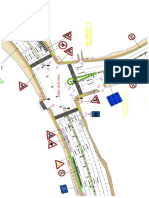
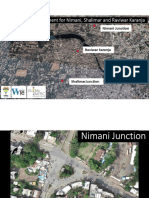
- NimaniDocument1 pageNimaniMahindra DeshmukhNo ratings yet
- WSP Future Ready Kerbside 2020Document62 pagesWSP Future Ready Kerbside 2020Mahindra DeshmukhNo ratings yet
- NSK SmaPTDocument62 pagesNSK SmaPTMahindra DeshmukhNo ratings yet
- Mahindra Deshmukh CVDocument6 pagesMahindra Deshmukh CVMahindra DeshmukhNo ratings yet
- Malegaon PDFDocument1 pageMalegaon PDFMahindra DeshmukhNo ratings yet
- Parking CasesDocument1 pageParking CasesMahindra DeshmukhNo ratings yet
- Nashi TDocument94 pagesNashi TMahindra DeshmukhNo ratings yet
- FWD: Extension To Tender: Founder/Principal EngineerDocument2 pagesFWD: Extension To Tender: Founder/Principal EngineerMahindra DeshmukhNo ratings yet
- RFP PDFDocument33 pagesRFP PDFMahindra DeshmukhNo ratings yet
- 1 CMPDocument592 pages1 CMPMahindra DeshmukhNo ratings yet
- FWD: PCMC Parking Tenders 1-6 Extension Request From Multiple BiddersDocument1 pageFWD: PCMC Parking Tenders 1-6 Extension Request From Multiple BiddersMahindra DeshmukhNo ratings yet
- 988 File7766620253 PDFDocument318 pages988 File7766620253 PDFMahindra DeshmukhNo ratings yet
- Chatrapati Shivaji Maharaj Chowk: Phase 1 Phase 2 Phase 3Document3 pagesChatrapati Shivaji Maharaj Chowk: Phase 1 Phase 2 Phase 3Mahindra DeshmukhNo ratings yet
- %of DMP Fatalities by Urban Fatalities by Collision TypesDocument2 pages%of DMP Fatalities by Urban Fatalities by Collision TypesMahindra DeshmukhNo ratings yet
- ROAD-64: Produced by An Autodesk Student VersionDocument1 pageROAD-64: Produced by An Autodesk Student VersionMahindra DeshmukhNo ratings yet
- Instructions for BOQ Annexure 6Document1 pageInstructions for BOQ Annexure 6Mahindra DeshmukhNo ratings yet
- Request to Extend Bid Submission for Smart Parking ProjectDocument2 pagesRequest to Extend Bid Submission for Smart Parking ProjectMahindra DeshmukhNo ratings yet
- Parking ECS ListDocument2 pagesParking ECS ListMahindra DeshmukhNo ratings yet
- FWD: Request For Tender Submission Date Extension: Founder/Principal EngineerDocument1 pageFWD: Request For Tender Submission Date Extension: Founder/Principal EngineerMahindra DeshmukhNo ratings yet
- Common Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Document60 pagesCommon Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Mahindra DeshmukhNo ratings yet
- FWD: Extension To Tender: V.bhojane@pcmcindia - Gov.inDocument2 pagesFWD: Extension To Tender: V.bhojane@pcmcindia - Gov.inMahindra DeshmukhNo ratings yet
- Common Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Document60 pagesCommon Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Mahindra DeshmukhNo ratings yet
- Item Rate Boq: Validate Print HelpDocument1 pageItem Rate Boq: Validate Print HelpMahindra DeshmukhNo ratings yet
- Package 1 AnnexureDocument51 pagesPackage 1 AnnexureMahindra DeshmukhNo ratings yet
- Lane Level of Service: Site: 101v (Nimani - Right Turn Bann)Document2 pagesLane Level of Service: Site: 101v (Nimani - Right Turn Bann)Mahindra DeshmukhNo ratings yet
- Item Rate Boq: Validate Print HelpDocument1 pageItem Rate Boq: Validate Print HelpMahindra DeshmukhNo ratings yet
- Common Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Document60 pagesCommon Set of Deviation For PCMC's On-Street & Off-Street Parking Projects (For Packages 1 To 6)Mahindra DeshmukhNo ratings yet
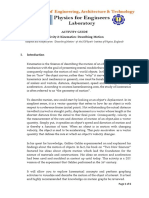
- Site Layout: Site: 101v (Nimani - Right Turn Bann)Document1 pageSite Layout: Site: 101v (Nimani - Right Turn Bann)Mahindra DeshmukhNo ratings yet
- Humour and IdentityDocument12 pagesHumour and IdentityLyann MartinezNo ratings yet
- Getting Off To A Good Start: Teacher FactorDocument30 pagesGetting Off To A Good Start: Teacher Factorsara wilsonNo ratings yet
- Modelling of Graphene Nano-Ribbon Transistors (Gnr-Fets) With Enhanced Drive CurrentsDocument9 pagesModelling of Graphene Nano-Ribbon Transistors (Gnr-Fets) With Enhanced Drive CurrentsShailendra YadavNo ratings yet
- Cc-5 SQL TableDocument5 pagesCc-5 SQL TableK.D. computerNo ratings yet
- Analyzing Resources and CapabilitiesDocument6 pagesAnalyzing Resources and CapabilitiesImola FazakasNo ratings yet
- MBenz E320 W211 CDI OM648 Specifications1Document31 pagesMBenz E320 W211 CDI OM648 Specifications1rodolfodiazNo ratings yet
- Control Systems GEDocument482 pagesControl Systems GECarlos ACNo ratings yet
- Bank Reconciliation Step-By-Step TutorialDocument20 pagesBank Reconciliation Step-By-Step TutorialTạ Tuấn DũngNo ratings yet
- კემპბელი თ16 353 363 დნმ და რეპლიკაციაDocument11 pagesკემპბელი თ16 353 363 დნმ და რეპლიკაციაSosoNo ratings yet
- Colonial Philippines in Transition - SEA StudiesDocument197 pagesColonial Philippines in Transition - SEA StudiesYong Mosqueda100% (1)
- Computer Networks: Humaira Ehsan Fall 2011Document18 pagesComputer Networks: Humaira Ehsan Fall 2011Bia JavedNo ratings yet
- Saptamsa and Navamsa Charts PDFDocument37 pagesSaptamsa and Navamsa Charts PDFjyothiNo ratings yet
- Klein After BachelardDocument13 pagesKlein After Bachelardyupengw122No ratings yet
- List of Technical Documents: IRB Paint Robots TR-500 / TR-5000Document16 pagesList of Technical Documents: IRB Paint Robots TR-500 / TR-5000Weberth TeixeiraNo ratings yet
- 2012 HCO Oriented Core ProceduresDocument30 pages2012 HCO Oriented Core ProceduresPancho Perez100% (1)
- Human Strategies For A Virtual World: Baldwin BergesDocument32 pagesHuman Strategies For A Virtual World: Baldwin BergesmoisesNo ratings yet
- DAILY LESSON LOG in Grade 7 ScienceDocument2 pagesDAILY LESSON LOG in Grade 7 Sciencejanice alquizar100% (3)
- BCS - SS-CRM 460 - 2 Jun2019Document2 pagesBCS - SS-CRM 460 - 2 Jun2019Peterson SudlabNo ratings yet
- 10 819 Astro Express LF Valve IODocument2 pages10 819 Astro Express LF Valve IOHary FadlyNo ratings yet
- The Ultimate Nikon SLR Handbook Vol 3Document19 pagesThe Ultimate Nikon SLR Handbook Vol 3Katie Freeman50% (4)
- Inverse Trigo and Functions BansalDocument28 pagesInverse Trigo and Functions BansalYagyank ChadhaNo ratings yet
- Math Quiz BeeDocument32 pagesMath Quiz BeeChristine BacordoNo ratings yet
- Delhi Skill and Entrepreneurship University: Application Form Session 2021-2022Document3 pagesDelhi Skill and Entrepreneurship University: Application Form Session 2021-2022Shyam DubeyNo ratings yet
- IL6 AdvtDocument9 pagesIL6 AdvtManoj Kumar100% (1)
- Apa Manual Chapter 2 SummaryDocument8 pagesApa Manual Chapter 2 SummaryAsma Masood0% (1)
- Diploma in Cyber Security - Data Communication and NetworkingDocument57 pagesDiploma in Cyber Security - Data Communication and Networkingsrikant.singh62583No ratings yet
- Van Inwagen's Treatment of The Problem of The ManyDocument13 pagesVan Inwagen's Treatment of The Problem of The ManyHershy FishmanNo ratings yet
- Calculating The Pinnacle Numbers - NumerologistDocument2 pagesCalculating The Pinnacle Numbers - NumerologistPanther PrimeNo ratings yet
- 1-) 32 M Reactor Unit: Mr. Şahin Kaplan Polyester Polyol FacilityDocument14 pages1-) 32 M Reactor Unit: Mr. Şahin Kaplan Polyester Polyol FacilitySema TaranacıNo ratings yet
- Tailor Welded BlanksDocument52 pagesTailor Welded BlanksYuvaraj YuvarajNo ratings yet