You might also like
- Equilibrium Constant For Hydrolysis Lab6finalDocument9 pagesEquilibrium Constant For Hydrolysis Lab6finalapi-534386927No ratings yet
- ENSC 20161 Course Assignment on Atoms and IonsDocument2 pagesENSC 20161 Course Assignment on Atoms and IonsJohn Mark AustriaNo ratings yet
- Physics Principles With Applications 7th Edition Giancoli Test BankDocument17 pagesPhysics Principles With Applications 7th Edition Giancoli Test Bankhelgasophie7478k0100% (31)
- Thermodynamics & KineticsDocument113 pagesThermodynamics & KineticsAMMASI A SHARAN0% (1)
- Chapter 9 - Engineering Alloys PDFDocument52 pagesChapter 9 - Engineering Alloys PDFAmeer Fauwaz100% (1)
- Principles of SolidificationDocument2 pagesPrinciples of SolidificationKhairul MuzafarNo ratings yet
- Selecting Tubing Materials For Power Generation Heat ExchangersDocument20 pagesSelecting Tubing Materials For Power Generation Heat ExchangersPing Apiwat100% (1)
- Solid Solutions and Phase Diagrams ExplainedDocument1 pageSolid Solutions and Phase Diagrams ExplainedSaniya SohailNo ratings yet
- Metal FormingDocument40 pagesMetal Formingumesh vasavaNo ratings yet
- 20230116-MT-205-PD-BNS-L-4 To L-6 (2022-2023) Notes - 2Document47 pages20230116-MT-205-PD-BNS-L-4 To L-6 (2022-2023) Notes - 2Kaustav SaikiaNo ratings yet
- High Entropy AlloysDocument8 pagesHigh Entropy AlloysTeka KamNo ratings yet
- MTech Industrial Metallurgy E Learning Executive Summary &FAQsDocument6 pagesMTech Industrial Metallurgy E Learning Executive Summary &FAQsakshukNo ratings yet
- ARTIGO Chapter 8 Solidification ShrinkageDocument67 pagesARTIGO Chapter 8 Solidification Shrinkagemarcotulio123No ratings yet
- Solidification of Metals (To Be Completed) : Prof. H. K. Khaira Professor, Deptt. of MSME M.A.N.I.T., BhopalDocument62 pagesSolidification of Metals (To Be Completed) : Prof. H. K. Khaira Professor, Deptt. of MSME M.A.N.I.T., BhopalIndranil Bhattacharyya100% (1)
- Equilibrium Crystallisation of Iron-Carbon Alloys LectureDocument25 pagesEquilibrium Crystallisation of Iron-Carbon Alloys LectureTisza_MNo ratings yet
- Microstructure of Steels and Cast IronDocument14 pagesMicrostructure of Steels and Cast IronPraicy Ann josephNo ratings yet
- Metallurgical Volume 1Document196 pagesMetallurgical Volume 1Ugadi SunilNo ratings yet
- Physical MetallurgyDocument101 pagesPhysical MetallurgySheikh Sabbir SarforazNo ratings yet
- TEM Lecture CrystallineDocument30 pagesTEM Lecture CrystallineSyed Abdul AhadNo ratings yet
- Physical Metallurgy M1 PDFDocument21 pagesPhysical Metallurgy M1 PDFAnca ElenaNo ratings yet
- Casting Technology 04Document11 pagesCasting Technology 04Sreekumar RajendrababuNo ratings yet
- Mme 201 - Introduction To Physical MetallurgyDocument633 pagesMme 201 - Introduction To Physical Metallurgynarasimhareddy415100% (1)
- Compatibility of Metals. Alloys With Static Pb-LiDocument101 pagesCompatibility of Metals. Alloys With Static Pb-LikambletanajiNo ratings yet
- GATE Metallurgical Engineering 2009Document12 pagesGATE Metallurgical Engineering 2009imamuddeenNo ratings yet
- Iron Carbon Phase DiagramDocument4 pagesIron Carbon Phase DiagramMizanur RahmanNo ratings yet
- CH 1 PPTS July 2008Document70 pagesCH 1 PPTS July 2008Guna RajNo ratings yet
- Solidification Lecture 2Document32 pagesSolidification Lecture 2Shabid AshrafNo ratings yet
- Composite Structures: Dinesh Kumar, S.B. SinghDocument13 pagesComposite Structures: Dinesh Kumar, S.B. Singhamit22141982No ratings yet
- Re CrystallizationDocument476 pagesRe CrystallizationJosé RamírezNo ratings yet
- Metals Elements: A. AlloyDocument4 pagesMetals Elements: A. AlloyMeeko TanNo ratings yet
- 5 Iron-Cementite Phase DiagramDocument46 pages5 Iron-Cementite Phase DiagramsmrutiNo ratings yet
- Material EngineeringDocument46 pagesMaterial EngineeringBoaquin KhenNo ratings yet
- DME Assignment 1Document2 pagesDME Assignment 1sumikannuNo ratings yet
- Aircraft Engineering and Aerospace Technology: Article InformationDocument13 pagesAircraft Engineering and Aerospace Technology: Article InformationjeffinNo ratings yet
- Recovery Recrystallization Grain GrowthDocument15 pagesRecovery Recrystallization Grain Growthteju1996coolNo ratings yet
- Material Science - Properties of MaterialsDocument13 pagesMaterial Science - Properties of MaterialsBlessings James Bwalya100% (1)
- The Use of Titanium in Family Automobiles: Current Trends: K. Faller and F.H. (Sam) FroesDocument2 pagesThe Use of Titanium in Family Automobiles: Current Trends: K. Faller and F.H. (Sam) FroesAmol HawaldarNo ratings yet
- Basic Metallurgy: Numbering Systems For Metals and AlloysDocument15 pagesBasic Metallurgy: Numbering Systems For Metals and AlloysAcid BurnsNo ratings yet
- Presented By, Uma .B. S Ii Sem Mtech (1MS11MSC013) Department of Mechanical EngineeringDocument18 pagesPresented By, Uma .B. S Ii Sem Mtech (1MS11MSC013) Department of Mechanical EngineeringJyoti Sharma100% (1)
- Investigation On Mechanical Properties of Aluminum (6065) With Copper by PM TechniqueDocument4 pagesInvestigation On Mechanical Properties of Aluminum (6065) With Copper by PM TechniqueVinoth KumarNo ratings yet
- Capitolo 5 - Laminate - enDocument40 pagesCapitolo 5 - Laminate - enkelvynNo ratings yet
- Physical Metallurgy-18 Heat Treatment of SteelDocument7 pagesPhysical Metallurgy-18 Heat Treatment of SteelDSGNo ratings yet
- Day-1 Lecture 1 Welding TechnologyDocument141 pagesDay-1 Lecture 1 Welding TechnologyRavi ShankarNo ratings yet
- Ch-27.6 Cast IronDocument45 pagesCh-27.6 Cast IronSmruti Ranjan PattanayakNo ratings yet
- Thesis (V Nashine)Document95 pagesThesis (V Nashine)Salil JainNo ratings yet
- Alloys and their PropertiesDocument12 pagesAlloys and their PropertiesNikhil ShelarNo ratings yet
- Nemo Pumps - The Perfect Pipeline PumpDocument6 pagesNemo Pumps - The Perfect Pipeline PumpDiana Lucía PadillaNo ratings yet
- MMS Unit IVDocument4 pagesMMS Unit IVAdula RajasekharNo ratings yet
- Bor1991 - Effect of Pearlite Banding On Mechanical Properties of Perlitic SteelDocument12 pagesBor1991 - Effect of Pearlite Banding On Mechanical Properties of Perlitic SteelAlejandroAcuñaMaureiraNo ratings yet
- Surface Hardening of SteelDocument50 pagesSurface Hardening of SteelTeptep GonzalesNo ratings yet
- Metallurgical ThermodynamicsDocument104 pagesMetallurgical ThermodynamicsKang Qin100% (1)
- Alu Technologies Book - Lecture-Notes - 1606 PagesDocument1,606 pagesAlu Technologies Book - Lecture-Notes - 1606 PagesPaul RosiahNo ratings yet
- Calculating Critical Temperatures in Steels Using Empirical FormulasDocument6 pagesCalculating Critical Temperatures in Steels Using Empirical FormulasAndress SsalomonnNo ratings yet
- The effect of annealing on aluminum clad steel sheet propertiesDocument6 pagesThe effect of annealing on aluminum clad steel sheet propertiesRina OktapianiNo ratings yet
- Chap 4 ElastiDocument15 pagesChap 4 Elastisaeed100% (1)
- Chapter 6 Phase DiagramsDocument73 pagesChapter 6 Phase DiagramsSaiful AzrieNo ratings yet
- l4 The Clausius-UpadiDocument8 pagesl4 The Clausius-UpadiMarcos Sánchez MartínezNo ratings yet
- LESSON 4-Solidification of Metals and AlloysDocument19 pagesLESSON 4-Solidification of Metals and Alloysmichael-education KNo ratings yet
- Materials Science & Engineering E-Book GuideDocument13 pagesMaterials Science & Engineering E-Book GuideBanwari Lal PrajapatNo ratings yet
- Corrosion Rate Calculation PDFDocument10 pagesCorrosion Rate Calculation PDFcometNo ratings yet
- Advances in Research on the Strength and Fracture of Materials: An OverviewFrom EverandAdvances in Research on the Strength and Fracture of Materials: An OverviewD M R TaplinNo ratings yet
- Oxidation of Organic Compounds: Medium Effects in Radical ReactionsFrom EverandOxidation of Organic Compounds: Medium Effects in Radical ReactionsRating: 4 out of 5 stars4/5 (1)
- Equilibrium Concentration of Interstitial AtomsDocument11 pagesEquilibrium Concentration of Interstitial AtomsSamarjeet Kumar SinghNo ratings yet
- Point defects equilibrium calculationsDocument13 pagesPoint defects equilibrium calculationsKinjal PrajapatiNo ratings yet
- Point defects equilibrium calculationsDocument13 pagesPoint defects equilibrium calculationsKinjal PrajapatiNo ratings yet
- Defects in The Ordered Phases: and The Activation EnergiesDocument10 pagesDefects in The Ordered Phases: and The Activation EnergiessmrutiNo ratings yet
- Phase Diagram Determination by Diffusion Couple TechniqueDocument9 pagesPhase Diagram Determination by Diffusion Couple TechniquesmrutiNo ratings yet
- Thermodynamics and Phase Diagrams: We Need To Consider Three Situations For Different Kinds of Enthalpy of MixingDocument7 pagesThermodynamics and Phase Diagrams: We Need To Consider Three Situations For Different Kinds of Enthalpy of MixingsmrutiNo ratings yet
- The Intrinsic Diffusion Coefficients: Darken Analysis and The Van Loo RelationDocument9 pagesThe Intrinsic Diffusion Coefficients: Darken Analysis and The Van Loo RelationsmrutiNo ratings yet
- Lecture20 PDFDocument9 pagesLecture20 PDFsmrutiNo ratings yet
- Defects in The Ordered Phases: and The Activation EnergiesDocument10 pagesDefects in The Ordered Phases: and The Activation EnergiessmrutiNo ratings yet
- Thermodynamic Parameters in A Binary System: Previously, We Considered One Element OnlyDocument11 pagesThermodynamic Parameters in A Binary System: Previously, We Considered One Element OnlysmrutiNo ratings yet
- Lecture22 PDFDocument12 pagesLecture22 PDFsmrutiNo ratings yet
- Lecture18 PDFDocument9 pagesLecture18 PDFsmrutiNo ratings yet
- Solution For Homogeneization (Separation of Variables) : C X (X) T (T)Document11 pagesSolution For Homogeneization (Separation of Variables) : C X (X) T (T)smrutiNo ratings yet
- Recent Developments On The Kirkendall Effect: W 800 °C 72 HrsDocument14 pagesRecent Developments On The Kirkendall Effect: W 800 °C 72 HrssmrutiNo ratings yet
- Chapter5 Diffusion HandoutsDocument9 pagesChapter5 Diffusion HandoutsestherNo ratings yet
- Driving Force For Diffusion and Fick's Laws of DiffusionDocument10 pagesDriving Force For Diffusion and Fick's Laws of DiffusionsmrutiNo ratings yet
- Lecture38 PDFDocument8 pagesLecture38 PDFsmrutiNo ratings yet
- Concept of The Chemical Potential and The Activity of ElementsDocument11 pagesConcept of The Chemical Potential and The Activity of ElementssmrutiNo ratings yet
- Lecture26 PDFDocument8 pagesLecture26 PDFsmrutiNo ratings yet
- Lecture 10Document13 pagesLecture 10ShameekaNo ratings yet
- Calculation of The Integrated Diffusion CoefficientsDocument6 pagesCalculation of The Integrated Diffusion CoefficientssmrutiNo ratings yet
- Lecture2 2Document10 pagesLecture2 2smrutiNo ratings yet
- Lecture28 PDFDocument6 pagesLecture28 PDFsmrutiNo ratings yet
- 4 SolidificationDocument39 pages4 SolidificationsmrutiNo ratings yet
- Lecture24 PDFDocument11 pagesLecture24 PDFsmrutiNo ratings yet
- Lecture16 PDFDocument15 pagesLecture16 PDFsmrutiNo ratings yet
- 03aDocument35 pages03asmrutiNo ratings yet
- Thermodynamics and Defects in Solids Thermodynamics and Defects in SolidsDocument10 pagesThermodynamics and Defects in Solids Thermodynamics and Defects in SolidsRicha TripathiNo ratings yet
- GVHJBDocument114 pagesGVHJBsmrutiNo ratings yet
- CW ResitDocument6 pagesCW ResitSyed Muhammad AlamNo ratings yet
- Gas Liquid Separator DesignDocument3 pagesGas Liquid Separator DesignSoheil MoradiNo ratings yet
- Proficiency Testing Program Registration Application PreviewDocument4 pagesProficiency Testing Program Registration Application PreviewShiv PandeyNo ratings yet
- Homework 1 - Solutions: Problem 1 - Free Electron Fermi SurfaceDocument5 pagesHomework 1 - Solutions: Problem 1 - Free Electron Fermi SurfaceThanh NguyenNo ratings yet
- Exp No 1Document3 pagesExp No 1arshitmalviya VIIADNo ratings yet
- Strain-Controlled Fatigue Testing: Standard Test Method ForDocument16 pagesStrain-Controlled Fatigue Testing: Standard Test Method ForNilton SantillanNo ratings yet
- Measuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °CDocument13 pagesMeasuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °Cmohammed karasnehNo ratings yet
- Research ArticleDocument14 pagesResearch ArticlePankaj KumarNo ratings yet
- Micronics Portaflow 216 Users Manual 555934Document32 pagesMicronics Portaflow 216 Users Manual 555934Edgar Ochoa VasqiezNo ratings yet
- Roald K. Wangsness - Electromagnetic Fields-Wiley (1986)Document598 pagesRoald K. Wangsness - Electromagnetic Fields-Wiley (1986)jujujaga86No ratings yet
- Celestial ManualDocument36 pagesCelestial ManualAdel ANo ratings yet
- Calculating allowable pressure for cylindrical shell designDocument14 pagesCalculating allowable pressure for cylindrical shell designToni100% (1)
- Cross Flow Part 1Document5 pagesCross Flow Part 1mohmmad othmanNo ratings yet
- 2020 Sec 4 Pure Physics SA2 Commonwealth SecondaryDocument40 pages2020 Sec 4 Pure Physics SA2 Commonwealth SecondaryTaneltyNo ratings yet
- 4 Three-Wire LevelingDocument3 pages4 Three-Wire LevelingBryanHarold BrooNo ratings yet
- Suggestionof Empirical Equationsfor Damping Ratioof PlasticanDocument7 pagesSuggestionof Empirical Equationsfor Damping Ratioof PlasticansouthsoniksNo ratings yet
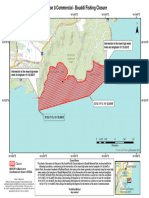
- Bouddi National Park Fishing Exclusion ZoneDocument1 pageBouddi National Park Fishing Exclusion ZonejdhjdhjdhNo ratings yet
- Undamentals of Ndustrial YgieneDocument52 pagesUndamentals of Ndustrial YgieneJunior Rengifo TorrejónNo ratings yet
- Vibration Report 2Document43 pagesVibration Report 2Get CubeloNo ratings yet
- Bostrig SC UnarmoredDocument3 pagesBostrig SC UnarmoredEnrique MartínezNo ratings yet
- AAMA 906-05: Voluntary Specification For Sliding Glass Door Roller AssembliesDocument5 pagesAAMA 906-05: Voluntary Specification For Sliding Glass Door Roller AssembliesMarian Joyce MacadineNo ratings yet
- Elec Eng 3Bb3:: Cellular BioelectricityDocument19 pagesElec Eng 3Bb3:: Cellular BioelectricityJens RydNo ratings yet
- Stopping Distance WsDocument3 pagesStopping Distance Wsmayana agarwalNo ratings yet
- Assignment 2Document2 pagesAssignment 2Gaurang MathurNo ratings yet
- ALGEBRA FORMULAS AND CONCEPTSDocument151 pagesALGEBRA FORMULAS AND CONCEPTSjohn benedict orbeNo ratings yet
- Petroleum Production Engineering II: Lecture 3: Production Decline AnalysaisDocument39 pagesPetroleum Production Engineering II: Lecture 3: Production Decline AnalysaisMarco PlaysNo ratings yet
- Basics of Radiation Therapy: Ryan K. Funk,, Abigail L. Stockham,, Nadia N. Issa LaackDocument22 pagesBasics of Radiation Therapy: Ryan K. Funk,, Abigail L. Stockham,, Nadia N. Issa LaackAlejo RLNo ratings yet