You might also like
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetAishwaryShuklaNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetPRINCE KUMARNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetZarah Mae BarreyroNo ratings yet
- Mechanics of Materials Formula SheetDocument3 pagesMechanics of Materials Formula SheetSam ReyesNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetAishwaryShuklaNo ratings yet
- STRENGTH of MaterialsDocument8 pagesSTRENGTH of MaterialskousikkumaarNo ratings yet
- Module 5 Stresses in BeamsDocument18 pagesModule 5 Stresses in BeamsJay LopezNo ratings yet
- Civil Engineering Mechanics: Moments of InertiaDocument8 pagesCivil Engineering Mechanics: Moments of InertiaKaiss Nael OsmanNo ratings yet
- Mech of Solids 1 Formula SheetDocument2 pagesMech of Solids 1 Formula SheetJames Joe . WoonNo ratings yet
- Roark Case 6-1Document16 pagesRoark Case 6-1KekekLagosNo ratings yet
- Lecture Notes Lessson 5 StressesDocument5 pagesLecture Notes Lessson 5 StressesKate Arbie LacdooNo ratings yet
- 高等鋼結構設計Lecture - 1-Eccentric Connections - Welded and BoltedDocument44 pages高等鋼結構設計Lecture - 1-Eccentric Connections - Welded and BoltedTeshome ChalaNo ratings yet
- Physics concepts explained in Vidyamandir classesDocument12 pagesPhysics concepts explained in Vidyamandir classesAnanmay ChauhanNo ratings yet
- Review For Stress AnalysisDocument15 pagesReview For Stress Analysissuthur27No ratings yet
- Chapter 7 IneritaDocument34 pagesChapter 7 Ineritatewodros aliNo ratings yet
- 1-Stress and Deflection PresentationDocument25 pages1-Stress and Deflection PresentationJulien ChanNo ratings yet
- Unit 5Document19 pagesUnit 5supraskyline2003No ratings yet
- Fracture Mechanics Solution Manual Chapter 1 Stresses StrainsDocument120 pagesFracture Mechanics Solution Manual Chapter 1 Stresses StrainsMahesh Raja50% (2)
- Moment of InertiaDocument47 pagesMoment of InertiaRahul NayakNo ratings yet
- DESIGNING MECHANISMS AND MACHINES: SPRINGSDocument45 pagesDESIGNING MECHANISMS AND MACHINES: SPRINGSAshraf EllamsyNo ratings yet
- Chapter 5-Mechanics of MaterialsDocument135 pagesChapter 5-Mechanics of MaterialsGia Phu NguyenNo ratings yet
- Stress Analysis of Pure Bending in BeamsDocument25 pagesStress Analysis of Pure Bending in BeamsgjhghjhgjNo ratings yet
- Mechanical PrinciplesDocument25 pagesMechanical PrinciplesJo okNo ratings yet
- Formula SheetDocument3 pagesFormula SheetJohan PienaarNo ratings yet
- Grand Test-1 Key & HintsDocument8 pagesGrand Test-1 Key & HintsM JEEVARATHNAM NAIDUNo ratings yet
- Formula SheetDocument3 pagesFormula SheetRobNo ratings yet
- Machine Elements BookletDocument8 pagesMachine Elements BookletsegaNo ratings yet
- Chapter 2 - Deformation and BendingDocument69 pagesChapter 2 - Deformation and BendingLai Swee YongNo ratings yet
- Solid Mechanics ME 212 - Week 13Document9 pagesSolid Mechanics ME 212 - Week 13Mihir Kumar MechNo ratings yet
- Moment of InertiaDocument71 pagesMoment of InertiaSomnath SomadderNo ratings yet
- Design Steel Beam in Flexure 1Document45 pagesDesign Steel Beam in Flexure 1Tri AldiNo ratings yet
- Clase 2Document69 pagesClase 2CristobalAlfaroNo ratings yet
- Solid Circular Section Hollow Circular Section: Non-Uniform Shear Stress DistributionDocument10 pagesSolid Circular Section Hollow Circular Section: Non-Uniform Shear Stress DistributionMohammad AbtaheeNo ratings yet
- Mom Section 25Document8 pagesMom Section 25Hanri PakpahanNo ratings yet
- Vibrations of Continuous SystemsDocument27 pagesVibrations of Continuous SystemslalbaghNo ratings yet
- Chapter9 Atalet Momentleri 2Document19 pagesChapter9 Atalet Momentleri 2Daniel obiangNo ratings yet
- ME210 - Area of Inertia PDFDocument28 pagesME210 - Area of Inertia PDFmesh.donebltchNo ratings yet
- Section 3,4: Bending Deformation, Strain and Stress in BeamsDocument20 pagesSection 3,4: Bending Deformation, Strain and Stress in BeamsRasool AkhterianNo ratings yet
- 9.moment of Inertia DefinitionDocument22 pages9.moment of Inertia DefinitionLady Alexandra Mendoza PascualNo ratings yet
- A Complete List of All The Formulas Needed For The Exam Strength of Materials 1Document4 pagesA Complete List of All The Formulas Needed For The Exam Strength of Materials 1Prakash BudhaNo ratings yet
- List of All The Formulas Needed For The Exam Strength of Materials 1 PDFDocument4 pagesList of All The Formulas Needed For The Exam Strength of Materials 1 PDFPrakash BudhaNo ratings yet
- Period 25 - Mohrs Circle For Plane Strain TransformationsDocument5 pagesPeriod 25 - Mohrs Circle For Plane Strain TransformationsDiego RiosecoNo ratings yet
- The Shear Formula: Calculating Shear StressDocument10 pagesThe Shear Formula: Calculating Shear StressHumesh SNo ratings yet
- Strength of Materials and Failure TheoriesDocument45 pagesStrength of Materials and Failure Theoriesstallone21No ratings yet
- Civil Engineering Mechanics CVG2149: Moments of Inertia Lec6Document7 pagesCivil Engineering Mechanics CVG2149: Moments of Inertia Lec6Kaiss Nael OsmanNo ratings yet
- Physics 430 Lecture on Driven Oscillations and ResonanceDocument9 pagesPhysics 430 Lecture on Driven Oscillations and Resonancesri kanthNo ratings yet
- Midterm EXAM1 Fall 2020 - Mod PDFDocument12 pagesMidterm EXAM1 Fall 2020 - Mod PDFErik GrantNo ratings yet
- Peak BroadeningDocument12 pagesPeak BroadeningAnthony AbelNo ratings yet
- Chapter 6-Moments of Inertia 2023Document16 pagesChapter 6-Moments of Inertia 2023Mihretab DawitNo ratings yet
- Transformations of Stress and S - MM312 (Compatibility Mode)Document22 pagesTransformations of Stress and S - MM312 (Compatibility Mode)Ryan GinNo ratings yet
- Chapter 6. Plane Bending (Part 2)Document113 pagesChapter 6. Plane Bending (Part 2)Lam TranNo ratings yet
- AP Rogo ET Section 6.3 Volumes of Rotational Solids - TSMDocument19 pagesAP Rogo ET Section 6.3 Volumes of Rotational Solids - TSMAnderson AlfredNo ratings yet
- Mechanical Engineering Science 3: Dynamics Mass Moment of InertiaDocument18 pagesMechanical Engineering Science 3: Dynamics Mass Moment of InertiaShailin SequeiraNo ratings yet
- ME311 Machine Design: Lecture 8: CylindersDocument15 pagesME311 Machine Design: Lecture 8: Cylindersarda akkayaNo ratings yet
- Bending Deformation, Strain and Stress in BeamsDocument21 pagesBending Deformation, Strain and Stress in BeamsWolelaw FikaduNo ratings yet
- Damped Free Oscillations Forced ForcedDocument67 pagesDamped Free Oscillations Forced Forcednabin PaudelNo ratings yet
- Review 2: Part 1-State of StressDocument12 pagesReview 2: Part 1-State of StressasadrNo ratings yet
- Stress Calculation PDFDocument9 pagesStress Calculation PDFEdzel RenomeronNo ratings yet
- Disposable Electrosurgical PencilsDocument4 pagesDisposable Electrosurgical PencilsAlfredo Malpartida VegaNo ratings yet
- Material ListDocument13 pagesMaterial ListSaid KarimNo ratings yet
- As 1275 Metric Threaded FastenersDocument20 pagesAs 1275 Metric Threaded FastenersJunnoKaiserNo ratings yet
- Bi-directional knife gate valve SL seriesDocument7 pagesBi-directional knife gate valve SL seriesPaseandoPorlaVidaNo ratings yet
- Bs 1806 1989Document22 pagesBs 1806 1989Kishor Jadhav100% (2)
- Valve Data Sheet: BCXS302TDocument1 pageValve Data Sheet: BCXS302TRoo FaNo ratings yet
- Tor Qui MetroDocument68 pagesTor Qui MetroVíc Mac IINo ratings yet
- Electric Rope Hoist ManualDocument72 pagesElectric Rope Hoist ManualJesus Dan MontielNo ratings yet
- Sec6 (DC)Document356 pagesSec6 (DC)Tifa AngNo ratings yet
- Siemens VXF22Document12 pagesSiemens VXF22Bora ÜnsalNo ratings yet
- Catalogo PistonesDocument196 pagesCatalogo PistonesalexjoseNo ratings yet
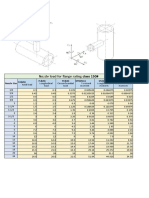
- Nozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)Document6 pagesNozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)olekNo ratings yet
- Oil Rig Components ExplainedDocument7 pagesOil Rig Components ExplainedJennifer Màrtin100% (5)
- Nojove I Kontra Noj VidoveDocument19 pagesNojove I Kontra Noj VidovesawiNo ratings yet
- Maintenant Part - Recc. ListDocument4 pagesMaintenant Part - Recc. ListNguyen TrungNo ratings yet
- Circuit Breaker SF1Document58 pagesCircuit Breaker SF1Alejandra Toro VelasquezNo ratings yet
- EIAC-PR-002 FM-001-An04 Rev. 3 IB ScopeDocument1 pageEIAC-PR-002 FM-001-An04 Rev. 3 IB Scoperagesh r nairNo ratings yet
- 12 Steps Engineering Safe Oil Gas FacilitiesDocument22 pages12 Steps Engineering Safe Oil Gas FacilitiesrobigedNo ratings yet
- Asb - Uh 1H Ii 07 10Document4 pagesAsb - Uh 1H Ii 07 10John PardoNo ratings yet
- Work Method Statement For Erection in Loc Start D and End CDocument8 pagesWork Method Statement For Erection in Loc Start D and End CTwin Bulls0% (1)
- Adwea Approved Vendor ListDocument251 pagesAdwea Approved Vendor ListMuhammad Azam100% (6)
- Indian Oil Cooperation LTD (Assam Oil Division Digboi Refinery)Document64 pagesIndian Oil Cooperation LTD (Assam Oil Division Digboi Refinery)NingSeng SingphoNo ratings yet
- 5-Why Analysis and Action Summary: Problem Statement 1st Why 2nd Why 3rd Why 4th Why 5th WhyDocument3 pages5-Why Analysis and Action Summary: Problem Statement 1st Why 2nd Why 3rd Why 4th Why 5th WhyAlef Luiz Camargo EsperandioNo ratings yet
- 69NT40-561-001 To 199: Container RefrigerationDocument136 pages69NT40-561-001 To 199: Container RefrigerationMAYMODERN STEELNo ratings yet
- NATOPS FLIGHT MANUAL-Mirage-IIICDocument19 pagesNATOPS FLIGHT MANUAL-Mirage-IIICNick NNo ratings yet
- Valvosider CatalogDocument76 pagesValvosider CatalogBruno ManzettiNo ratings yet
- Examen Parte CDocument7 pagesExamen Parte CIsmael HernándezNo ratings yet
- Glidermatic GRD Setting Door Travel LimitsDocument1 pageGlidermatic GRD Setting Door Travel LimitsMatt HowellNo ratings yet
- D112 Gypsum Board Suspended Ceiling System GuideDocument2 pagesD112 Gypsum Board Suspended Ceiling System GuideRinor Rushiti100% (1)