You might also like
- Dynamics FULL Equation SheetDocument2 pagesDynamics FULL Equation SheetZachNo ratings yet
- Progressive WaveDocument9 pagesProgressive WaveRS Sporso GuptaNo ratings yet
- Mechanical Vibration Damping TypesDocument6 pagesMechanical Vibration Damping TypessrinivasanNo ratings yet
- Free Convection PDFDocument9 pagesFree Convection PDFaditya a pNo ratings yet
- BL Session 03Document5 pagesBL Session 03shanoon77No ratings yet
- Contoh Silinder 1Document5 pagesContoh Silinder 1Sindy SANo ratings yet
- Lecture 02 - Maxwell DistributionDocument8 pagesLecture 02 - Maxwell DistributionKowser mahmudNo ratings yet
- The DSB-SCDocument21 pagesThe DSB-SCmhww9jqqpjNo ratings yet
- 1.5 Vector AlgebraDocument8 pages1.5 Vector Algebra七海未来No ratings yet
- Stresses in Eccentric Hollow CylinderDocument21 pagesStresses in Eccentric Hollow CylinderJayNo ratings yet
- Worksheet 1Document4 pagesWorksheet 1lusizo.nqwenisolNo ratings yet
- Single Side Band Modulation SSBDocument23 pagesSingle Side Band Modulation SSBHariprasad VolluriNo ratings yet
- Formula Sheet – Exam 1Document1 pageFormula Sheet – Exam 1Elie HobeikaNo ratings yet
- 1 L2 Basic Interference (Step by Step) v.2Document7 pages1 L2 Basic Interference (Step by Step) v.2Vincent TionoNo ratings yet
- CIEM 5390 Lecture Notes Set 6Document16 pagesCIEM 5390 Lecture Notes Set 6lastbald3No ratings yet
- Physics 141 Equation Sheet for Motion, Forces & EnergyDocument1 pagePhysics 141 Equation Sheet for Motion, Forces & EnergySimon SituNo ratings yet
- Finite Element Method: - Derivation of Element PropertiesDocument7 pagesFinite Element Method: - Derivation of Element PropertiesKaran PatelNo ratings yet
- Solving Linear and Non-Linear Simultaneous EquationsDocument14 pagesSolving Linear and Non-Linear Simultaneous EquationsSoemiyati FasihNo ratings yet
- MS2018Document2 pagesMS2018herewego759No ratings yet
- SpringsDocument5 pagesSpringsAhmad AbdNo ratings yet
- Microelectronics: Jun-Hong WengDocument52 pagesMicroelectronics: Jun-Hong WengSamuel YuNo ratings yet
- Soil Exploration (Geophysical Exploration)Document15 pagesSoil Exploration (Geophysical Exploration)ZakNo ratings yet
- Lecture 2Document22 pagesLecture 2유서시No ratings yet
- Descriptive Memory of Acoustic Oud DesignDocument18 pagesDescriptive Memory of Acoustic Oud DesignDario Martin LobosNo ratings yet
- Hagen Poisuille EquationDocument4 pagesHagen Poisuille EquationRochakNo ratings yet
- L07 - Charge Carrier Density - 1 PDFDocument17 pagesL07 - Charge Carrier Density - 1 PDFakshat mishraNo ratings yet
- Exam 2 PDFDocument6 pagesExam 2 PDFMustafa Abd ElhamidNo ratings yet
- Derivation of Diffusivity EquationDocument5 pagesDerivation of Diffusivity EquationHassan AmerNo ratings yet
- Vibration of Floating Structures Lecture 5Document13 pagesVibration of Floating Structures Lecture 5Bat ManNo ratings yet
- ME-223 Assignment 7 Solutions: SolutionDocument10 pagesME-223 Assignment 7 Solutions: SolutionShivangNo ratings yet
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- Chapter 8 - Applications (2016!10!18)Document16 pagesChapter 8 - Applications (2016!10!18)RickNo ratings yet
- Midpoint: Vector Between Two PointsDocument3 pagesMidpoint: Vector Between Two Pointsali alkassemNo ratings yet
- 3 Chapter 3Document15 pages3 Chapter 3Mohamed TarekNo ratings yet
- Microwave Class NotesDocument6 pagesMicrowave Class NotesTI NafisNo ratings yet
- 5Document6 pages5Yas MonazahNo ratings yet
- HW3 Coastal Prediction Analysis Theories - FaizalDocument4 pagesHW3 Coastal Prediction Analysis Theories - Faizaltitoburbano12No ratings yet
- Fluid Mechanics ReviewDocument17 pagesFluid Mechanics ReviewquanNo ratings yet
- Vector AnalysisDocument2 pagesVector AnalysismylimbofriendNo ratings yet
- HE Lecture 4 PDFDocument12 pagesHE Lecture 4 PDFpresidentisc nit-rourkelaNo ratings yet
- Chapter 4 - ModellingDocument25 pagesChapter 4 - ModellingRickNo ratings yet
- Damping: Single Degree of FreedomDocument28 pagesDamping: Single Degree of FreedomAbdulrahmanNo ratings yet
- Last Part Aerodynamic Lec 5 - 2023Document18 pagesLast Part Aerodynamic Lec 5 - 2023مصطفى عبدالله عبدالرحمن اغاNo ratings yet
- Combined loadings lessonDocument11 pagesCombined loadings lessonVictoriaNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- Three Node TriangleDocument19 pagesThree Node TriangleMariam SalehNo ratings yet
- Types of PendulumsDocument10 pagesTypes of PendulumsAdrian Arasu100% (1)
- MS2019Document2 pagesMS2019herewego759No ratings yet
- Wave Optics DSSSBDocument30 pagesWave Optics DSSSBShubhamNo ratings yet
- Pure Bending of Thin Plate ExperimentDocument8 pagesPure Bending of Thin Plate ExperimentRahul RoyNo ratings yet
- PH 2Document10 pagesPH 2Ali RajaNo ratings yet
- Vector Field Note 2Document33 pagesVector Field Note 2Kevwe Macaulay -GbogidiNo ratings yet
- 1stLE Lecture 06 - R3 Position, Velocity and Acceleration in 2D, 3DDocument30 pages1stLE Lecture 06 - R3 Position, Velocity and Acceleration in 2D, 3DExceed DivinagraciaNo ratings yet
- Physics 1 Formula SheetDocument2 pagesPhysics 1 Formula SheetMichaelNo ratings yet
- Engineering VibrationDocument18 pagesEngineering VibrationJohn TentNo ratings yet
- Example 3: A Bead (Or Ring) Sliding On A: Uniformly Rotating Wire in A Force-Free SpaceDocument8 pagesExample 3: A Bead (Or Ring) Sliding On A: Uniformly Rotating Wire in A Force-Free SpaceKristine Rodriguez-Carnicer100% (1)
- Solving Two-Phase Flow in a Square ChannelDocument4 pagesSolving Two-Phase Flow in a Square Channele_ghadirianNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Parameter Estimation for Regression ModelsDocument11 pagesParameter Estimation for Regression ModelsAlpha WolfNo ratings yet
- EE-101 Frequency Response - 1 July-Nov 2017Document5 pagesEE-101 Frequency Response - 1 July-Nov 2017Alpha WolfNo ratings yet
- CS229 Lecture notes on PCADocument6 pagesCS229 Lecture notes on PCAAlpha WolfNo ratings yet
- Quality Factor: EE-101 Frequency Response - 3 July-Nov 2017Document4 pagesQuality Factor: EE-101 Frequency Response - 3 July-Nov 2017Alpha WolfNo ratings yet
- CS229 Lecture notes on PCADocument6 pagesCS229 Lecture notes on PCAAlpha WolfNo ratings yet
- 2019 Nizar Parida Pal Optimization of Friction Stir Welding Process Using NSGA-II and DEMO - Neural Comp and Application PDFDocument10 pages2019 Nizar Parida Pal Optimization of Friction Stir Welding Process Using NSGA-II and DEMO - Neural Comp and Application PDFAlpha WolfNo ratings yet
- Additional Notes On BackpropagationDocument2 pagesAdditional Notes On Backpropagationballsarini aNo ratings yet
- CS229 Lecture notes on PCADocument6 pagesCS229 Lecture notes on PCAAlpha WolfNo ratings yet
- MLE MAP Regression PDFDocument11 pagesMLE MAP Regression PDFAlpha WolfNo ratings yet
- 007bayesian Decision Theory Part 1Document23 pages007bayesian Decision Theory Part 1Mukesh ChaudharyNo ratings yet
- ANN Paper PDFDocument11 pagesANN Paper PDFAlpha WolfNo ratings yet
- Lecture8 PDFDocument42 pagesLecture8 PDFsoongbinNo ratings yet
- Metal Forming 1 PDFDocument6 pagesMetal Forming 1 PDFAlpha WolfNo ratings yet
- Parameter - Esimation - 2 (Compatibility Mode) PDFDocument10 pagesParameter - Esimation - 2 (Compatibility Mode) PDFAlpha WolfNo ratings yet
- Gaussian Mixture ModelsDocument35 pagesGaussian Mixture ModelsAlpha WolfNo ratings yet
- K Means Clustering Algorithm ExplainedDocument17 pagesK Means Clustering Algorithm ExplainedAlpha WolfNo ratings yet
- Bayesian Nets PDFDocument14 pagesBayesian Nets PDFAlpha WolfNo ratings yet
- Sheet Metal Forming PDFDocument8 pagesSheet Metal Forming PDFAlpha WolfNo ratings yet
- 009bayesian Decision Theory Discriminant FunctionsDocument17 pages009bayesian Decision Theory Discriminant FunctionsMukesh ChaudharyNo ratings yet
- Natural Convection and Turbulent Flows PDFDocument33 pagesNatural Convection and Turbulent Flows PDFAlpha WolfNo ratings yet
- ME324 - Semi Infinite Slab PDFDocument11 pagesME324 - Semi Infinite Slab PDFAlpha WolfNo ratings yet
- Heat Exchnager PPT Updated - 12-3-19 PDFDocument55 pagesHeat Exchnager PPT Updated - 12-3-19 PDFAlpha WolfNo ratings yet
- Welding 2 PDFDocument26 pagesWelding 2 PDFAlpha WolfNo ratings yet
- Welding 2 PDFDocument26 pagesWelding 2 PDFAlpha WolfNo ratings yet
- Rolling process guideDocument13 pagesRolling process guideAlpha WolfNo ratings yet
- Welding 1Document28 pagesWelding 1captain indiaNo ratings yet
- Powder Metallurgy - 3 PDFDocument18 pagesPowder Metallurgy - 3 PDFAlpha WolfNo ratings yet
- Forging: Category Based On Temperature: Cold, Warm, Hot ForgingDocument8 pagesForging: Category Based On Temperature: Cold, Warm, Hot ForgingAlpha WolfNo ratings yet
- Power Plant Engineering PK Nag1Document994 pagesPower Plant Engineering PK Nag1Satti SihalohoNo ratings yet
- Curcuma y MetforminaDocument8 pagesCurcuma y MetforminaJorge Luis Plasencia CubaNo ratings yet
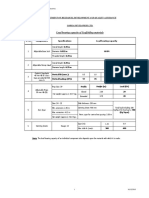
- Scaffolding Load Bearing CapacityDocument1 pageScaffolding Load Bearing CapacityGanga Daran100% (4)
- Frankfurt School - Birmingham School Key Theorists and Concepts-PPT-20Document20 pagesFrankfurt School - Birmingham School Key Theorists and Concepts-PPT-20Keith KnightNo ratings yet
- Report of Lost, Stolen, Damaged or Destroyed Property: Appendix 75Document3 pagesReport of Lost, Stolen, Damaged or Destroyed Property: Appendix 75Knoll Viado100% (1)
- Practical Research 2: Quarter 4 - Module 4Document56 pagesPractical Research 2: Quarter 4 - Module 4Kenneth EncarnacionNo ratings yet
- Mise en place ingredients and equipment listDocument10 pagesMise en place ingredients and equipment listDavis Sagini ArtNo ratings yet
- Swami Vivekananda's 1893 Chicago Speech on Religious UnityDocument2 pagesSwami Vivekananda's 1893 Chicago Speech on Religious UnityBiplab MahantiNo ratings yet
- Design and Construction of A Wireless We PDFDocument69 pagesDesign and Construction of A Wireless We PDFPeculiar EbhueleNo ratings yet
- Directions To Candidates Paper 1 - MedicalDocument29 pagesDirections To Candidates Paper 1 - MedicalMedicEdNo ratings yet
- Lo Visual en YourcenarDocument272 pagesLo Visual en YourcenarJosé Ignacio Herrera LamasNo ratings yet
- Sorting Lesson PlanDocument4 pagesSorting Lesson PlanStasha DuttNo ratings yet
- 04-1101 Motion To RecuseDocument8 pages04-1101 Motion To RecuseSlabbed100% (2)
- Gajanan Maharaj - WikipediaDocument2 pagesGajanan Maharaj - WikipediaRAAJAN ThiyagarajanNo ratings yet
- Kurdonia Structural Design ReportDocument341 pagesKurdonia Structural Design ReportAnonymous nQ9RqmNo ratings yet
- Quadcopter Math Model (Amazing)Document26 pagesQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- Employee Satisfaction Analysis and InterpretationDocument29 pagesEmployee Satisfaction Analysis and InterpretationkhayyumNo ratings yet
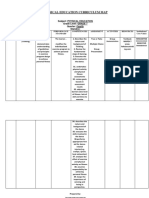
- Physical Education Curriculum MapDocument20 pagesPhysical Education Curriculum MapdyonaraNo ratings yet
- Pc128us 2 Sebm018419 PDFDocument1,029 pagesPc128us 2 Sebm018419 PDFLuis Carlos Ramos100% (1)
- Moyen Et Al., 2003, JSGDocument21 pagesMoyen Et Al., 2003, JSGambika senNo ratings yet
- Un Ejercicio para 2º BACHILLERATO. (An Exercise For Advanced Students.)Document4 pagesUn Ejercicio para 2º BACHILLERATO. (An Exercise For Advanced Students.)Herber HerberNo ratings yet
- Extended Paper 2 May 00Document12 pagesExtended Paper 2 May 00Mari Carmen Pérez GómezNo ratings yet
- KP Astrology: Prediction in Krishnamurthy Padhathi Using KP HoraryDocument3 pagesKP Astrology: Prediction in Krishnamurthy Padhathi Using KP HoraryM.venkateswarlu GuptaNo ratings yet
- Lab Manual: CSC-216 (L8) - Data StructuresDocument7 pagesLab Manual: CSC-216 (L8) - Data StructuresAbid KhanNo ratings yet
- 2012 09 16 Our Anchor in Times of StormDocument3 pages2012 09 16 Our Anchor in Times of StormJohn S. KodiyilNo ratings yet
- Cy and JoyDocument6 pagesCy and JoyAlexander GreatNo ratings yet
- Labor 2 CasesDocument77 pagesLabor 2 CasesMercado MarloNo ratings yet
- Reaction KineticsDocument37 pagesReaction KineticsDaisyNo ratings yet
- Wesley L SPED854 M5 Broken ArmDocument6 pagesWesley L SPED854 M5 Broken ArmLeah WesleyNo ratings yet
- Ventilation and Airflow in BuildingsDocument211 pagesVentilation and Airflow in Buildingsjakejohns100% (3)