You might also like
- Solution Manual For Modern Quantum Mechanics 2nd Edition by SakuraiDocument13 pagesSolution Manual For Modern Quantum Mechanics 2nd Edition by Sakuraia440706299No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Slab DesignDocument96 pagesSlab Designdilrangi100% (2)
- Midpoint: Vector Between Two PointsDocument3 pagesMidpoint: Vector Between Two Pointsali alkassemNo ratings yet
- Solubility PDFDocument36 pagesSolubility PDFAshwin Narayan100% (1)
- Calculate Quantities of Materials For Concrete - Cement, Sand, AggregatesDocument7 pagesCalculate Quantities of Materials For Concrete - Cement, Sand, Aggregatesvenkateswara rao pothinaNo ratings yet
- List of IEC StandardsDocument12 pagesList of IEC Standardsaravindeee08100% (1)
- Creating Interfaces For The SAP Application Interface Framework With Service Implementation WorkbenchDocument12 pagesCreating Interfaces For The SAP Application Interface Framework With Service Implementation WorkbenchKrishanu DuttaNo ratings yet
- Buchholz Relay OperationDocument71 pagesBuchholz Relay Operationlinus abrahamNo ratings yet
- Divergence Theorem of Gauss-Lec-6Document9 pagesDivergence Theorem of Gauss-Lec-6aryanNo ratings yet
- Dynamic Analysis of Op-AmpDocument5 pagesDynamic Analysis of Op-AmpSayemNo ratings yet
- Remember Basic Closed Loop Amplifier: An Op-Amp With Negative Feedback (A Non-Inverting Amplifier)Document3 pagesRemember Basic Closed Loop Amplifier: An Op-Amp With Negative Feedback (A Non-Inverting Amplifier)ruukiNo ratings yet
- ELT2035 Signals: & SystemsDocument31 pagesELT2035 Signals: & SystemsTrần Ngọc TúNo ratings yet
- 01 Time Domain SpecificationDocument26 pages01 Time Domain SpecificationShadowツNo ratings yet
- Hyperbolic FunctionsDocument23 pagesHyperbolic FunctionsPaula FanaNo ratings yet
- Interactions of Electromagnetic Waves With Waveguide Structures With Applications To Outdoor, Indoor and Outdoor-To-Indoor Propagation PredictionDocument23 pagesInteractions of Electromagnetic Waves With Waveguide Structures With Applications To Outdoor, Indoor and Outdoor-To-Indoor Propagation PredictionArnab PattanayakNo ratings yet
- Lesson 5Document14 pagesLesson 5Octav PaloaieNo ratings yet
- + + So Integrating Factor Will Be So × × + / +Document4 pages+ + So Integrating Factor Will Be So × × + / +Jaya ChaubeyNo ratings yet
- Appendix B: Transducer Power Gain Derivation: Z V + V V + V V VDocument4 pagesAppendix B: Transducer Power Gain Derivation: Z V + V V + V V Vbraines@gmailNo ratings yet
- L07 - Charge Carrier Density - 1 PDFDocument17 pagesL07 - Charge Carrier Density - 1 PDFakshat mishraNo ratings yet
- Div TheoremDocument8 pagesDiv TheoremTanvir RahmanNo ratings yet
- Data Shetet 7th .PDF UpgreadeDocument1 pageData Shetet 7th .PDF UpgreadeAbdallah LotfyNo ratings yet
- Part 6 ResonanceDocument33 pagesPart 6 Resonancekathy shiNo ratings yet
- Laplacian, Conservative Field (Lecture 7)Document4 pagesLaplacian, Conservative Field (Lecture 7)BlessingNo ratings yet
- Free FireDocument7 pagesFree FirePs PsNo ratings yet
- MATH 1023/1024 Lecture Notes Chapter 4 - Riemann Integrals: Hong Kong University of Science and Technology July 29, 2023Document5 pagesMATH 1023/1024 Lecture Notes Chapter 4 - Riemann Integrals: Hong Kong University of Science and Technology July 29, 2023Taylor ZhangNo ratings yet
- Lightning Protection AssignmentDocument4 pagesLightning Protection AssignmentsameeraNo ratings yet
- IM BrakingDocument10 pagesIM BrakingABCNo ratings yet
- Antenna Lect4Document22 pagesAntenna Lect4fadwaalhadereeNo ratings yet
- Laplace and Z-TransformsDocument23 pagesLaplace and Z-TransformsHussam AliraqiNo ratings yet
- AC Fundementals - Part IIDocument20 pagesAC Fundementals - Part IIwhitehatesmNo ratings yet
- Retriggerable Monostable MultivibratorDocument7 pagesRetriggerable Monostable MultivibratorOzan AbutNo ratings yet
- Formula RioDocument2 pagesFormula RiololoNo ratings yet
- Solution For Problem 2Document2 pagesSolution For Problem 2Juan ElricNo ratings yet
- Fe-Sem2 M2-CBCGS Dec17 Solution PDFDocument21 pagesFe-Sem2 M2-CBCGS Dec17 Solution PDFSarvesh ParabNo ratings yet
- Lecture2 v1Document36 pagesLecture2 v1Kathérine JosephNo ratings yet
- Roman Dominating Set in GraphsDocument1 pageRoman Dominating Set in GraphsNilamsari Kusumastuti100% (1)
- Tutorial 4 Sol S21920Document5 pagesTutorial 4 Sol S21920Zhenjie YueNo ratings yet
- The First Fundamental Theorem of Calculus Second Fundamental Theorem of CalculusDocument7 pagesThe First Fundamental Theorem of Calculus Second Fundamental Theorem of Calculuskierby sanbagrielNo ratings yet
- Fenomena Perpindahan: Doni Alfizah / 150405006 Muhammad Anwar / 150405046 Faisal M. Rizky Siregar / 150405099Document9 pagesFenomena Perpindahan: Doni Alfizah / 150405006 Muhammad Anwar / 150405046 Faisal M. Rizky Siregar / 150405099Putri DiahNo ratings yet
- EE633 - Online - Lect4 - OFDM - Part - 2Document9 pagesEE633 - Online - Lect4 - OFDM - Part - 2Nitesh agrahariNo ratings yet
- Es202 7Document9 pagesEs202 7Abbas TufanNo ratings yet
- 1phase-Half Wave Uncontrolled Rectifier: RL - Load: R-Load With Capacitor FilterDocument1 page1phase-Half Wave Uncontrolled Rectifier: RL - Load: R-Load With Capacitor FilterAhmad Ash SharkawiNo ratings yet
- CHE 330 Example For Annulus FlowDocument4 pagesCHE 330 Example For Annulus FlowShodmon TolibovNo ratings yet
- Measurement and Instrumentation Lab: Experiment 1Document44 pagesMeasurement and Instrumentation Lab: Experiment 1Pranay DumbhareNo ratings yet
- Guass Legendre - Elyass ArramaDocument5 pagesGuass Legendre - Elyass ArramaElyass ArramaNo ratings yet
- Ph101: Physics 1Document19 pagesPh101: Physics 1Shrey GuptaNo ratings yet
- EE533 Summary Topics Pre LockdownDocument10 pagesEE533 Summary Topics Pre LockdownNitesh agrahariNo ratings yet
- AnalysisDocument11 pagesAnalysisNISHANK KANSARANo ratings yet
- Progressive WaveDocument9 pagesProgressive WaveRS Sporso GuptaNo ratings yet
- 11 FM Lecture-Online - (EE-CpE-ICT)Document8 pages11 FM Lecture-Online - (EE-CpE-ICT)AsdffghhklNo ratings yet
- Section 5: Finite Volume Methods For The Navier Stokes EquationsDocument27 pagesSection 5: Finite Volume Methods For The Navier Stokes EquationsUmutcanNo ratings yet
- Unit 2 NotesDocument27 pagesUnit 2 Notes19058nithishNo ratings yet
- Hagen Poisuille EquationDocument4 pagesHagen Poisuille EquationRochakNo ratings yet
- Statistical Mechanics (part-II)Document30 pagesStatistical Mechanics (part-II)Shadow GamingNo ratings yet
- Lecture # 3 (Complex Numbers)Document22 pagesLecture # 3 (Complex Numbers)ahmad5557222No ratings yet
- 1.dynamics of Relativistic Particles and Electromagnetic FieldsDocument6 pages1.dynamics of Relativistic Particles and Electromagnetic FieldsAyushman BishwasNo ratings yet
- Packed Bed Absorber - Without Chemical ReactionDocument13 pagesPacked Bed Absorber - Without Chemical ReactionAhmadSatrioNo ratings yet
- Maths Paper I - Riemann Integration 2Document18 pagesMaths Paper I - Riemann Integration 2Thinker DNo ratings yet
- Descriptive Memory of Acoustic Oud DesignDocument18 pagesDescriptive Memory of Acoustic Oud DesignDario Martin LobosNo ratings yet
- Solution of Quasi OneDocument4 pagesSolution of Quasi OneEdwin TomNo ratings yet
- Physics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeDocument6 pagesPhysics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeFavourite MoviesNo ratings yet
- Discrete Series of GLn Over a Finite Field. (AM-81), Volume 81From EverandDiscrete Series of GLn Over a Finite Field. (AM-81), Volume 81No ratings yet
- EE534 Line CodesDocument66 pagesEE534 Line CodesNitesh agrahariNo ratings yet
- EE533 Summary Topics Pre LockdownDocument10 pagesEE533 Summary Topics Pre LockdownNitesh agrahariNo ratings yet
- EE633 - Online - Lect4 - OFDM - Part - 2Document9 pagesEE633 - Online - Lect4 - OFDM - Part - 2Nitesh agrahariNo ratings yet
- ARQ Protocols and Reliable Data TransferDocument48 pagesARQ Protocols and Reliable Data TransferNitesh agrahariNo ratings yet
- EE533 - Online - Lect5 - OFDM - Part - 3Document9 pagesEE533 - Online - Lect5 - OFDM - Part - 3Nitesh agrahariNo ratings yet
- Effects of Pilot Contamination and Non-Synchronous TransmissionDocument12 pagesEffects of Pilot Contamination and Non-Synchronous TransmissionNitesh agrahariNo ratings yet
- Power Control in Single-Cell Massive MIMO SystemsDocument17 pagesPower Control in Single-Cell Massive MIMO SystemsNitesh agrahariNo ratings yet
- Ee534 - Udp - TCP Transport Layer ProtocolDocument108 pagesEe534 - Udp - TCP Transport Layer ProtocolNitesh agrahariNo ratings yet
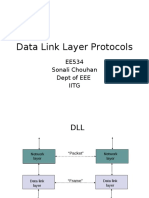
- Data Link Layer: EE534 Dr. Sonali Chouhan Dept of EEE, IITGDocument53 pagesData Link Layer: EE534 Dr. Sonali Chouhan Dept of EEE, IITGNitesh agrahariNo ratings yet
- Ee534 DLL HDLCDocument41 pagesEe534 DLL HDLCNitesh agrahariNo ratings yet
- Report Final Propeller PDFDocument31 pagesReport Final Propeller PDFNitesh agrahariNo ratings yet
- Power Control in Multi-Cell Massive MIMO SystemsDocument20 pagesPower Control in Multi-Cell Massive MIMO SystemsNitesh agrahariNo ratings yet
- EE 590 - Linear Algebra & Optimization Assignment 2: Steepest Descent MethodDocument1 pageEE 590 - Linear Algebra & Optimization Assignment 2: Steepest Descent MethodNitesh agrahariNo ratings yet
- A Concise Introduction To Machine Learni PDFDocument7 pagesA Concise Introduction To Machine Learni PDFNitesh agrahariNo ratings yet
- Recap: UL Pilots and Channel Estimation in Multiple CellsDocument10 pagesRecap: UL Pilots and Channel Estimation in Multiple CellsNitesh agrahariNo ratings yet
- SPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingDocument10 pagesSPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingBruceNo ratings yet
- 39 - Profil Uang Elektronik - Spesifikasi TeknisDocument9 pages39 - Profil Uang Elektronik - Spesifikasi TeknisM DedeNo ratings yet
- Manual AvicadDocument676 pagesManual AvicadOlivia BlanaruNo ratings yet
- Konfigurimi 02 - SkylightDocument3 pagesKonfigurimi 02 - Skylightismet mehmetiNo ratings yet
- Chemical Principles Notes Chapter 7Document86 pagesChemical Principles Notes Chapter 7Robert GardnerNo ratings yet
- Ball BearingsDocument31 pagesBall Bearingsnike_y2kNo ratings yet
- CTX 310 Communication With Fast Ethernet Board V2 (Fanuc)Document34 pagesCTX 310 Communication With Fast Ethernet Board V2 (Fanuc)iveNo ratings yet
- SeqP&D GPL Met enDocument52 pagesSeqP&D GPL Met enSriram ChNo ratings yet
- Jee Advanced PaperDocument3 pagesJee Advanced PaperGaurav YadavNo ratings yet
- Maths ReportDocument3 pagesMaths ReportShishir BogatiNo ratings yet
- Arthashastra: Citation NeededDocument4 pagesArthashastra: Citation NeededtusharNo ratings yet
- Cooling Unit SpecDocument4 pagesCooling Unit Specmirali74No ratings yet
- PLCC-28: FeaturesDocument5 pagesPLCC-28: Features肖磊No ratings yet
- ASM Lab Record BookDocument36 pagesASM Lab Record BookNandan HegdeNo ratings yet
- EIE3123 Dynamic Electronic Systems - p1-p57Document57 pagesEIE3123 Dynamic Electronic Systems - p1-p57Safwat KhairNo ratings yet
- Guar Gum: Product Data Sheet (PDS)Document1 pageGuar Gum: Product Data Sheet (PDS)Moatz HamedNo ratings yet
- Converting CLOBs 2 VARCHARDocument15 pagesConverting CLOBs 2 VARCHARMa GicNo ratings yet
- Nuxeo BookDocument335 pagesNuxeo Bookdannao4No ratings yet
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorDocument4 pagesHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeNo ratings yet
- Chapter Test 2nd Quarter.Document5 pagesChapter Test 2nd Quarter.Roziel MontalbanNo ratings yet
- SuperDeck All ModelsDocument12 pagesSuperDeck All Modelsarthur chungNo ratings yet
- Subjects Revised Curriculum BS ELECTRICAL ENGINEERINGDocument18 pagesSubjects Revised Curriculum BS ELECTRICAL ENGINEERINGData StatsNo ratings yet
- Topic: Partnership: Do Not Distribute - Highly Confidential 1Document7 pagesTopic: Partnership: Do Not Distribute - Highly Confidential 1Tharun NaniNo ratings yet