0% found this document useful (0 votes)
551 views9 pagesTransfer Functions: G(S) X (S) F (S)
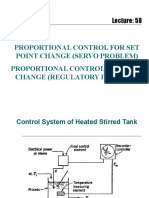
Transfer functions represent system dynamics using Laplace transforms by relating the output of a system to the input. A transfer function G(s) is the ratio of the output X(s) to the input F(s) in the s-domain. Transfer functions can be derived from ordinary differential equations, state equations, or block diagrams. They describe system dynamics and ignore initial conditions. Examples show how to derive transfer functions for first and second order systems.
Uploaded by
Candy ChocolateCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
551 views9 pagesTransfer Functions: G(S) X (S) F (S)
Transfer functions represent system dynamics using Laplace transforms by relating the output of a system to the input. A transfer function G(s) is the ratio of the output X(s) to the input F(s) in the s-domain. Transfer functions can be derived from ordinary differential equations, state equations, or block diagrams. They describe system dynamics and ignore initial conditions. Examples show how to derive transfer functions for first and second order systems.
Uploaded by
Candy ChocolateCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd