You might also like
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Line Codes RZ AND NRZDocument48 pagesLine Codes RZ AND NRZjigef19343No ratings yet
- The Inverter The Inverter: ReferencesDocument124 pagesThe Inverter The Inverter: Referencessalman1992No ratings yet
- Chapter3 Lect5Document16 pagesChapter3 Lect5mhamdi mounirNo ratings yet
- QPSK Experiment No 4 (31-May-2023)Document3 pagesQPSK Experiment No 4 (31-May-2023)shovanjitmaity2No ratings yet
- 7p2 Pulse Shaping and Nyquist For Zero ISIDocument15 pages7p2 Pulse Shaping and Nyquist For Zero ISIMohamed ShabanaNo ratings yet
- The Inverter ReportDocument47 pagesThe Inverter Reportronaldbolorbaral8809No ratings yet
- Principles of Data Conversion: Digital to Analog and Analog to DigitalDocument58 pagesPrinciples of Data Conversion: Digital to Analog and Analog to DigitalprahiiiNo ratings yet
- Lec 8 NotesDocument9 pagesLec 8 NotesAlan BensonNo ratings yet
- Current Transformer Sizing: (August 19, 2010) By: Siva Singupuram James TrinhDocument62 pagesCurrent Transformer Sizing: (August 19, 2010) By: Siva Singupuram James Trinhpccluster50% (4)
- Basic Electronics: AC Circuits and FiltersDocument35 pagesBasic Electronics: AC Circuits and FiltersFerdinan YudaNo ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- OM402UNI M 2013 3v3en Part81Document1 pageOM402UNI M 2013 3v3en Part81Trung Phạm ThànhNo ratings yet
- Logical Operations: 1's ComplementDocument11 pagesLogical Operations: 1's ComplementHarlow SeabornNo ratings yet
- Digital Transmission: 01204325: Data Communication and Computer NetworksDocument35 pagesDigital Transmission: 01204325: Data Communication and Computer NetworksJagadamba SureshNo ratings yet
- Transmission Lines & Termination Techniques: SAED VLSI GroupDocument17 pagesTransmission Lines & Termination Techniques: SAED VLSI GrouplusinNo ratings yet
- Fair Use NoticeDocument19 pagesFair Use Noticeziku laghariNo ratings yet
- Assignment 4 f2016 SolnDocument5 pagesAssignment 4 f2016 SolnphoebezzNo ratings yet
- SI11 Fast Eye PDFDocument70 pagesSI11 Fast Eye PDFGrimmjow JaegerjaquezNo ratings yet
- 01 Aero Thrust Pendulum IntroductionDocument40 pages01 Aero Thrust Pendulum IntroductionRooshNo ratings yet
- Exercise-04 - Noise Margin and Realization of Logic GatesDocument4 pagesExercise-04 - Noise Margin and Realization of Logic GatesSumanth KakaniNo ratings yet
- Performance Specification: Basic InstructionDocument3 pagesPerformance Specification: Basic InstructionMangnimit SomlakNo ratings yet
- 11 ADC-DAC - Rev03Document74 pages11 ADC-DAC - Rev03WEERAWAT AUA-AUAYCHAINo ratings yet
- Fault Current Calculation ModuleDocument65 pagesFault Current Calculation ModuleEdward Baleke SsekulimaNo ratings yet
- CHAP3.Arus Bolak BalikDocument35 pagesCHAP3.Arus Bolak BalikOmi Luthfia RahmanNo ratings yet
- Notes 0919Document6 pagesNotes 0919seagull76No ratings yet
- Bqstroller Calculation Tools - V1.5Document54 pagesBqstroller Calculation Tools - V1.5Oscarito VázquezNo ratings yet
- ESC201T L14 Phasor AnalysisDocument23 pagesESC201T L14 Phasor AnalysisRachit MahajanNo ratings yet
- ADC (Analog-To-Digital Converter) and Sensor InterfacingDocument17 pagesADC (Analog-To-Digital Converter) and Sensor InterfacingAbdullah MuzammilNo ratings yet
- Advantages of Digital InstrumentsDocument30 pagesAdvantages of Digital InstrumentsAsin PillaiNo ratings yet
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument36 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurAbhishek AryaNo ratings yet
- b6 Testing Numerical Transformer Differential Relays Ieee1173Document40 pagesb6 Testing Numerical Transformer Differential Relays Ieee1173sasahitoNo ratings yet
- PRBS Generator Using VHDL FinalDocument17 pagesPRBS Generator Using VHDL FinalAlpesh ThesiyaNo ratings yet
- Pep9 ReferenceDocument6 pagesPep9 Reference19524 AlekhyaNo ratings yet
- Analog and Digital LinksDocument31 pagesAnalog and Digital LinksDr Ravi Kumar A VNo ratings yet
- AC Circuits: Fundamentals of Electric CircuitsDocument16 pagesAC Circuits: Fundamentals of Electric CircuitsHiếu Dương100% (1)
- Universal Gates - NAND and NOR Gate FundamentalsDocument12 pagesUniversal Gates - NAND and NOR Gate FundamentalsAfride LaskarNo ratings yet
- 7 LogicStyle3Document59 pages7 LogicStyle3YeasminNo ratings yet
- SY3302 Communication ProtocolDocument6 pagesSY3302 Communication Protocolandrew279583No ratings yet
- Two Poert Network 2 IIT DelhiDocument24 pagesTwo Poert Network 2 IIT Delhishivaji2006No ratings yet
- Frequency and Period Measurement: TransmitterDocument24 pagesFrequency and Period Measurement: TransmitterSavuDanielFNo ratings yet
- Dynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityDocument50 pagesDynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityLawiii KkkNo ratings yet
- DAC Resistive Divider Circuit ExplainedDocument50 pagesDAC Resistive Divider Circuit ExplainedGohgulan Murugan100% (2)
- An introduction to Verilog HDLDocument27 pagesAn introduction to Verilog HDLKaliraja ThangamaniNo ratings yet
- Touch-Panel Controller Implemented With Ltps TFTS: Keechan Park, Jaeeun Pi, - Konkuk UniversityDocument16 pagesTouch-Panel Controller Implemented With Ltps TFTS: Keechan Park, Jaeeun Pi, - Konkuk UniversitykeechanparkNo ratings yet
- E2.11/ISE2.22 - Digital Electronics IIDocument4 pagesE2.11/ISE2.22 - Digital Electronics IIkolhejayantNo ratings yet
- Panasonic Projector RS-232C Control SpecificationsDocument12 pagesPanasonic Projector RS-232C Control SpecificationsjafarptrNo ratings yet
- Distance Protection TheoryDocument31 pagesDistance Protection TheoryDaniel Andres Bastardo NuñezNo ratings yet
- CD4538Document11 pagesCD4538Sridhar MohanNo ratings yet
- Digital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsDocument39 pagesDigital To Analog Converter: Nov. 1, 2005 Fabian Goericke, Keunhan Park, Geoffrey WilliamsPunit MishraNo ratings yet
- IEEE guide for safety of AC substation grounding sample calculationDocument20 pagesIEEE guide for safety of AC substation grounding sample calculationadel zrafiNo ratings yet
- Slides6 Updated1Document28 pagesSlides6 Updated1saqibmaxNo ratings yet
- Formula Sheet: Essential Transmission Line EquationsDocument4 pagesFormula Sheet: Essential Transmission Line EquationsFarid BeyrouthyNo ratings yet
- SR30 - Modbus MapDocument9 pagesSR30 - Modbus MapMuathNo ratings yet
- Digital PLL Cicc Tutorial PerrottDocument118 pagesDigital PLL Cicc Tutorial PerrottSwethaVellankiNo ratings yet
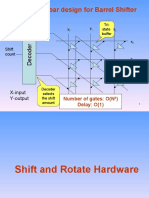
- NxN Crossbar design for Barrel ShifterDocument18 pagesNxN Crossbar design for Barrel Shifterhamza abbasNo ratings yet
- VHDL QRC 01 PDFDocument2 pagesVHDL QRC 01 PDFlitoduterNo ratings yet
- Chapter 1 - Circuit Characterization of CMOS CircuitsDocument60 pagesChapter 1 - Circuit Characterization of CMOS CircuitsYean TernNo ratings yet
- Experiment 1Document6 pagesExperiment 1ɪsʜ ᴍᴀɴʀᴀɪNo ratings yet
- G 993 2-201603-Amd2Document430 pagesG 993 2-201603-Amd2Stanislav NikitinNo ratings yet
- MP 10Document48 pagesMP 10mikadoturkNo ratings yet
- Okuma Program FormatDocument7 pagesOkuma Program FormatmikadoturkNo ratings yet
- Vdocuments - MX Machine Tools OkumaDocument21 pagesVdocuments - MX Machine Tools OkumamikadoturkNo ratings yet
- Typical Power Drawbar Clamping ForcesDocument1 pageTypical Power Drawbar Clamping ForcesmikadoturkNo ratings yet
- Rohm PuntaDocument3 pagesRohm PuntamikadoturkNo ratings yet
- Hexagonal Opening Center ModelsDocument1 pageHexagonal Opening Center ModelsmikadoturkNo ratings yet
- Makino Pro3 ProgmanualDocument224 pagesMakino Pro3 ProgmanuallastowlNo ratings yet
- Mazak Parameter List, M-Codes, Alarm Manual Forl MatrixDocument490 pagesMazak Parameter List, M-Codes, Alarm Manual Forl MatrixMauro S Cabral100% (1)
- '97 VMC Operator's Manual PDFDocument109 pages'97 VMC Operator's Manual PDFPham Long100% (1)
- M700V, M70V - Programming Manual (Lathe System) IB (NA) - 1500924-G (03.14)Document794 pagesM700V, M70V - Programming Manual (Lathe System) IB (NA) - 1500924-G (03.14)mikadoturkNo ratings yet
- MAZAK MatrixMillTurn EIA ProgManualDocument618 pagesMAZAK MatrixMillTurn EIA ProgManuallastowlNo ratings yet
- 1.0 General: Drafting ManualDocument23 pages1.0 General: Drafting Manualst_fanuc100% (1)
- NC PGMDocument185 pagesNC PGMveerla3457No ratings yet
- MR J2S - ADocument402 pagesMR J2S - AErika Jeanne Porlas JimenezNo ratings yet
- Improving Tool Life With Minimum Quantity Lubrication: Technical ReportDocument2 pagesImproving Tool Life With Minimum Quantity Lubrication: Technical ReportmikadoturkNo ratings yet
- Ib1500928engf PDFDocument449 pagesIb1500928engf PDFkumar sivaNo ratings yet
- M700V, M70V - Programming Manual (Machining Center System) IB (NA) - 1500926-F (03.14)Document838 pagesM700V, M70V - Programming Manual (Machining Center System) IB (NA) - 1500926-F (03.14)mikadoturkNo ratings yet
- Ib 1501229 EngcDocument554 pagesIb 1501229 EngcmikadoturkNo ratings yet
- Operating Manual: Micro Disk SystemDocument39 pagesOperating Manual: Micro Disk Systemmikadoturk100% (1)
- M700V, M70V - Programming Manual (M2, M0 Format) IB (NA) - 1500930-D (09.13)Document826 pagesM700V, M70V - Programming Manual (M2, M0 Format) IB (NA) - 1500930-D (09.13)mikadoturkNo ratings yet
- SVR4 68K Admin Volume 1 Feb1992 PDFDocument344 pagesSVR4 68K Admin Volume 1 Feb1992 PDFmikadoturkNo ratings yet
- Spindle - Drawbar Force Reference TableDocument1 pageSpindle - Drawbar Force Reference TablemikadoturkNo ratings yet
- Asm Lang Prog 68K FamilyDocument256 pagesAsm Lang Prog 68K FamilyPanos BriniasNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Embedded-Systems Laboratory Motorola M6800 MicroprocessorDocument4 pagesEmbedded-Systems Laboratory Motorola M6800 MicroprocessorgiovanyNo ratings yet
- PG - 1102 - en (Programming Guide 11 - 2002 Edition)Document504 pagesPG - 1102 - en (Programming Guide 11 - 2002 Edition)mikadoturkNo ratings yet
- Metric fits and tolerances chartDocument1 pageMetric fits and tolerances chartChin Yuan GohNo ratings yet
- Spring CalculationsDocument1 pageSpring CalculationsROHAN DESAINo ratings yet
- Ch15 Raiborn SMDocument26 pagesCh15 Raiborn SMMendelle Murry100% (1)
- Tech Paper - Dynamic Analysis of Rotary MachineDocument11 pagesTech Paper - Dynamic Analysis of Rotary MachineSid ShendgeNo ratings yet
- Worm and Wheel Gear: NomenclatureDocument14 pagesWorm and Wheel Gear: NomenclatureHamid MasoodNo ratings yet
- Topic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesDocument35 pagesTopic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesAravind Ravi100% (1)
- Chapter Wise Worksheet Grade - 8Document13 pagesChapter Wise Worksheet Grade - 8Roamin Uchiha (Aarush)No ratings yet
- Phys 126 Ch 18 Review Electric ChargeDocument2 pagesPhys 126 Ch 18 Review Electric ChargeJustin BNo ratings yet
- SystemVerilog DPI With SystemCDocument17 pagesSystemVerilog DPI With SystemCSWAPNIL DWIVEDINo ratings yet
- Chapter 2 AgaDocument22 pagesChapter 2 AgaNina AmeduNo ratings yet
- DROPS Calculator Metric A4 PDFDocument2 pagesDROPS Calculator Metric A4 PDFTobeFrankNo ratings yet
- CS ASSESSMENT - Math Language and LogicDocument2 pagesCS ASSESSMENT - Math Language and Logickat dizonNo ratings yet
- MATRIX MATH PACKAGE GUIDEDocument10 pagesMATRIX MATH PACKAGE GUIDEemillianoNo ratings yet
- Liquidity, Asset Utilization, Debt Ratio and Firm Performance: Evidence From EgyptDocument32 pagesLiquidity, Asset Utilization, Debt Ratio and Firm Performance: Evidence From EgyptMsa-Management Sciences JournalNo ratings yet
- Example Math (Sci)Document4 pagesExample Math (Sci)Khin Chuu SanNo ratings yet
- 1 - Number SystemsDocument15 pages1 - Number Systemskaziba stephenNo ratings yet
- Mechanical Engineering - Final PDFDocument248 pagesMechanical Engineering - Final PDFRubal SharmaNo ratings yet
- Ingles Cronwell PDFDocument3,512 pagesIngles Cronwell PDFChristian SeminarioNo ratings yet
- Grade 7 TosDocument2 pagesGrade 7 Tosapi-610307288No ratings yet
- Ariella 110560649Document8 pagesAriella 110560649Ravi DixitNo ratings yet
- Broad Band Bow Tie AntennaDocument101 pagesBroad Band Bow Tie Antennafreon1999No ratings yet
- Laplace and Poissons EquationDocument22 pagesLaplace and Poissons EquationGowrishankar JayapalanNo ratings yet
- Lab 3 TutorialDocument53 pagesLab 3 TutorialAkshay100% (1)
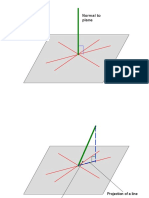
- Projecting Lines & Calculating Angles Between Planes & DiagonalsDocument8 pagesProjecting Lines & Calculating Angles Between Planes & DiagonalsDewan Olin ChotepadaeNo ratings yet
- Calculus Released Exam 2003 Scoring WorksheetDocument6 pagesCalculus Released Exam 2003 Scoring WorksheetvingtsNo ratings yet
- Kondrashov 1995 Contamination of The Genome by Very Slightly Deleterious Mutations Why Have We Not Died 100 Times OverDocument1 pageKondrashov 1995 Contamination of The Genome by Very Slightly Deleterious Mutations Why Have We Not Died 100 Times OverConner DavidsonNo ratings yet
- Strategic Management Process ExplainedDocument43 pagesStrategic Management Process ExplainedJohn Paul PrestonNo ratings yet
- Little's Law*: *J. D. C. Little, A proof of the queueing formula: L = λW,Document25 pagesLittle's Law*: *J. D. C. Little, A proof of the queueing formula: L = λW,Mariam MassaȜdehNo ratings yet
- Abaqus Analysis User's Manual, 32.15 (User Elements)Document22 pagesAbaqus Analysis User's Manual, 32.15 (User Elements)Elias BuNo ratings yet
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyFrom EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyRating: 4 out of 5 stars4/5 (51)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumFrom EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumRating: 3 out of 5 stars3/5 (12)
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideFrom EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideRating: 5 out of 5 stars5/5 (2)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Pick Three: You Can Have It All (Just Not Every Day)From EverandPick Three: You Can Have It All (Just Not Every Day)Rating: 4.5 out of 5 stars4.5/5 (4)
- AI Superpowers: China, Silicon Valley, and the New World OrderFrom EverandAI Superpowers: China, Silicon Valley, and the New World OrderRating: 4.5 out of 5 stars4.5/5 (398)
- The Corporate Startup: How established companies can develop successful innovation ecosystemsFrom EverandThe Corporate Startup: How established companies can develop successful innovation ecosystemsRating: 4 out of 5 stars4/5 (6)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andFrom EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andRating: 4.5 out of 5 stars4.5/5 (708)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)