You might also like
- SAT - Pittella - AntennaCubeSat - IAA CU 13 13 05 PDFDocument6 pagesSAT - Pittella - AntennaCubeSat - IAA CU 13 13 05 PDFMarc AnmellaNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Horn AntennaDocument2 pagesHorn Antennaprashant4455No ratings yet
- Eit-M: 1.title: Design, Simulation and Performance Analysis of Helix Array AntennaDocument18 pagesEit-M: 1.title: Design, Simulation and Performance Analysis of Helix Array AntennamuseNo ratings yet
- Dual-Circular Polarized Square Micro Strip Antenna: Sarat Babu Moka ECE Dept S.R.No:4810-413-061-04727Document5 pagesDual-Circular Polarized Square Micro Strip Antenna: Sarat Babu Moka ECE Dept S.R.No:4810-413-061-04727drga pasadNo ratings yet
- A New Fractal Antenna For Super Wideband ApplicationsDocument4 pagesA New Fractal Antenna For Super Wideband ApplicationskillerjackassNo ratings yet
- Research Article: Circular Microstrip Patch Array Antenna For C-Band Altimeter SystemDocument8 pagesResearch Article: Circular Microstrip Patch Array Antenna For C-Band Altimeter SystemdaniNo ratings yet
- h0502 PDFDocument13 pagesh0502 PDFYuniet Diaz LazoNo ratings yet
- A Q-Slot Monopole Antenna For Uwb Body-Centric Applications: Supervisor: Dr. Garima SrivastavaDocument29 pagesA Q-Slot Monopole Antenna For Uwb Body-Centric Applications: Supervisor: Dr. Garima SrivastavaÂnushreeSrîvastavaNo ratings yet
- Simulate Helical Antenna using AN-SOFDocument9 pagesSimulate Helical Antenna using AN-SOFKim Andre Macaraeg100% (1)
- A New Quadri C Ifilar Helix Antenna For Communications SpaceDocument2 pagesA New Quadri C Ifilar Helix Antenna For Communications SpacebetthersNo ratings yet
- Control and Pointing Challenges of New Radio Telescopes and Optical TelescopesDocument26 pagesControl and Pointing Challenges of New Radio Telescopes and Optical Telescopestux2testNo ratings yet
- High Performance Compact Broadband Planar Monopole Antenna For Uwb (Ultra Wide Band) ApplicationsDocument20 pagesHigh Performance Compact Broadband Planar Monopole Antenna For Uwb (Ultra Wide Band) ApplicationsanuragNo ratings yet
- NovDec 2015 EC 2045Document27 pagesNovDec 2015 EC 2045Rathna Assistant ProfessorNo ratings yet
- Dual Band Microstrip Patch Antenna For Sar ApplicationsDocument7 pagesDual Band Microstrip Patch Antenna For Sar ApplicationsvyehNo ratings yet
- A Novel Four-Arm Planar Spiral Antenna For GNSS ApplicationDocument8 pagesA Novel Four-Arm Planar Spiral Antenna For GNSS ApplicationRifaqat HussainNo ratings yet
- Planar AntennasDocument13 pagesPlanar AntennasKrishna TyagiNo ratings yet
- Multi-Topics On AntennaDocument43 pagesMulti-Topics On AntennaAbid akbarNo ratings yet
- Antenna and Radio Wave Propagation ExperimentsDocument38 pagesAntenna and Radio Wave Propagation ExperimentsPrajwal ShettyNo ratings yet
- Low Profile UHF/VHF Metamaterial Backed Circularly Polarized Antenna StructureDocument10 pagesLow Profile UHF/VHF Metamaterial Backed Circularly Polarized Antenna Structureroozbeh198No ratings yet
- Design and Analysis of Quadrifilar Helical Antenna for Cube-SatsDocument9 pagesDesign and Analysis of Quadrifilar Helical Antenna for Cube-Satsajayroy2No ratings yet
- A Novel Ultra-Wide Band Antenna Design Using Notches and StairsDocument5 pagesA Novel Ultra-Wide Band Antenna Design Using Notches and StairsSandeepSranNo ratings yet
- Survey of Microwave Antenna Design ProblemsDocument623 pagesSurvey of Microwave Antenna Design Problemsspkrishna4u7369No ratings yet
- V12 PDFDocument623 pagesV12 PDFFrew FrewNo ratings yet
- V12Document623 pagesV12Mahendra SinghNo ratings yet
- Introduction to Antenna Design and Simulation in HFSSDocument56 pagesIntroduction to Antenna Design and Simulation in HFSSPrabinjoseNo ratings yet
- HelicalDocument8 pagesHelicalAnamiya BhattacharyaNo ratings yet
- LAB 4 Helical Antenna Simulation Using CST Microwave StudioDocument7 pagesLAB 4 Helical Antenna Simulation Using CST Microwave StudioBARRATHY A/P VAGANANTHAN STUDENTNo ratings yet
- Design and Performance of the ALMA-J Prototype AntennaDocument9 pagesDesign and Performance of the ALMA-J Prototype AntennaManoj KumarNo ratings yet
- Thesis Fractal AntennaDocument6 pagesThesis Fractal Antennaxmlzofhig100% (2)
- Earth observation satellite orbital parameters and geostationary orbit calculationsDocument9 pagesEarth observation satellite orbital parameters and geostationary orbit calculationsAakansha SuchittaNo ratings yet
- ECE S508 Question BankDocument2 pagesECE S508 Question BankMMhammed AlrowailyNo ratings yet
- CantennaDocument14 pagesCantennaMalkuth_TachtonNo ratings yet
- CMA For Antenna Placement WebDocument2 pagesCMA For Antenna Placement WebUdhamNo ratings yet
- Federal Aviation Agency (FAA) Point-To-Point Log Periodic Antenna System Final Report Granger Associates, 01-1963.Document61 pagesFederal Aviation Agency (FAA) Point-To-Point Log Periodic Antenna System Final Report Granger Associates, 01-1963.Bob Laughlin, KWØRLNo ratings yet
- Design of An Archimedean Spiral AntennaDocument37 pagesDesign of An Archimedean Spiral AntennavikramNo ratings yet
- Design and Simulation Based Studies of A Dual Band U-Slot Patch Antenna For WLAN ApplicationDocument5 pagesDesign and Simulation Based Studies of A Dual Band U-Slot Patch Antenna For WLAN ApplicationAwol HasenNo ratings yet
- Microwave AntennaDocument65 pagesMicrowave AntennamadhuNo ratings yet
- Fractalcoms: The Square Spiral Antenna: Benchmark For Prefractal Antenna PerformanceDocument20 pagesFractalcoms: The Square Spiral Antenna: Benchmark For Prefractal Antenna Performanceঅল্পবোঝা পাবলিকNo ratings yet
- Ece Vi Antennas and Propagation (10ec64) NotesDocument112 pagesEce Vi Antennas and Propagation (10ec64) NotesMuhammad Ali ShoaibNo ratings yet
- Kai Da2015 PA 5 PDFDocument8 pagesKai Da2015 PA 5 PDFVinod KumarNo ratings yet
- Common AlgorithmDocument4 pagesCommon AlgorithmSatyajitPandaNo ratings yet
- Progress in Electromagnetics Research Letters, Vol. 6, 149-156, 2009Document8 pagesProgress in Electromagnetics Research Letters, Vol. 6, 149-156, 2009ThineshNo ratings yet
- Seminar ReportDocument13 pagesSeminar ReportKesto LoriakNo ratings yet
- Delacruz JVR - Exp6Document16 pagesDelacruz JVR - Exp6Vanz DCNo ratings yet
- VivaldiDocument8 pagesVivaldiThomas ManningNo ratings yet
- Numerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersDocument5 pagesNumerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersBruce LennyNo ratings yet
- AWP ManualDocument26 pagesAWP ManualSandip SolankiNo ratings yet
- Exp 10 ShikharBarthwal 2001178Document5 pagesExp 10 ShikharBarthwal 2001178asNo ratings yet
- EH Antenna Test 1Document27 pagesEH Antenna Test 1Tihomir MitrovicNo ratings yet
- Design and Development of Tapered Spiral Helix AntennaDocument5 pagesDesign and Development of Tapered Spiral Helix AntennaseventhsensegroupNo ratings yet
- Thesis On Fractal AntennaDocument8 pagesThesis On Fractal AntennaTracy Morgan100% (1)
- Franek 2011Document7 pagesFranek 2011Rakha Panji AdinegoroNo ratings yet
- A Study of Three Satellite Constellation Design AlgorithmsDocument11 pagesA Study of Three Satellite Constellation Design AlgorithmsvalstavNo ratings yet
- Ea467 Eznec06lDocument6 pagesEa467 Eznec06l20dgleeNo ratings yet
- Reconfigurable Circular Ring Patch Antenna For UWB and Cognitive Radio ApplicationsDocument5 pagesReconfigurable Circular Ring Patch Antenna For UWB and Cognitive Radio ApplicationsDr-Gurpreet KumarNo ratings yet
- TRP Engineering College Question Bank on Antenna and Wave PropagationDocument2 pagesTRP Engineering College Question Bank on Antenna and Wave PropagationPetrishia ArockiasamyNo ratings yet
- 1.2 Literature Survey 1. Compact Triple-Band Antenna For Wimaxand Wlan ApplicationsDocument49 pages1.2 Literature Survey 1. Compact Triple-Band Antenna For Wimaxand Wlan ApplicationsRampratheep vNo ratings yet
- Types of antennas used in satellite communicationDocument7 pagesTypes of antennas used in satellite communicationchinu meshramNo ratings yet
- The New York Times - August 02 2021Document42 pagesThe New York Times - August 02 2021Pepe LuisNo ratings yet
- NEW SCIENTIST - JUNE 12 TH 2021Document60 pagesNEW SCIENTIST - JUNE 12 TH 2021Pepe LuisNo ratings yet
- BARRON 180 S - JUNE 14 TH 2021Document72 pagesBARRON 180 S - JUNE 14 TH 2021Pepe LuisNo ratings yet
- THE WEEK - UK - JUNE 12 TH 2021Document52 pagesTHE WEEK - UK - JUNE 12 TH 2021Pepe LuisNo ratings yet
- THE NEW YORK TIMES - JUNE 10 TH 2021Document50 pagesTHE NEW YORK TIMES - JUNE 10 TH 2021Pepe LuisNo ratings yet
- Saved!: Dane Awake in Hospital and Is Doing Well'Document32 pagesSaved!: Dane Awake in Hospital and Is Doing Well'Pepe LuisNo ratings yet
- TIME MAGAZINE - USA - JUNE 21 TH 2021Document116 pagesTIME MAGAZINE - USA - JUNE 21 TH 2021Pepe LuisNo ratings yet
- Cows On The Rampage: Ban Ministers From Lobbying For Five YearsDocument36 pagesCows On The Rampage: Ban Ministers From Lobbying For Five YearsDon José Antonio García-Trevijano ForteNo ratings yet
- THE TIMES - UK - JUNE 14 TH 2021Document76 pagesTHE TIMES - UK - JUNE 14 TH 2021Pepe LuisNo ratings yet
- Biden Rallies Western Allies in Bid To Counter Chinese InfluenceDocument18 pagesBiden Rallies Western Allies in Bid To Counter Chinese InfluencePepe LuisNo ratings yet
- HELLO 33 MAGAZINE - UK - JUNE 21 TH 2021Document108 pagesHELLO 33 MAGAZINE - UK - JUNE 21 TH 2021Pepe LuisNo ratings yet
- THE TIMES 2 - UK - JUNE 14 TH 2021Document16 pagesTHE TIMES 2 - UK - JUNE 14 TH 2021Pepe LuisNo ratings yet
- THE TIMES BUSINESS - UK - JUNE 13 TH 2021Document14 pagesTHE TIMES BUSINESS - UK - JUNE 13 TH 2021Pepe LuisNo ratings yet
- THE TIMES CULTURE - UK - JUNE 13 TH 2021Document64 pagesTHE TIMES CULTURE - UK - JUNE 13 TH 2021Pepe LuisNo ratings yet
- It Was Distressing and Emotional': Gary Lineker On His Most Difficult MomentDocument16 pagesIt Was Distressing and Emotional': Gary Lineker On His Most Difficult MomentPepe LuisNo ratings yet
- THE NEW YORKER - JUNE 21 TH 2021Document78 pagesTHE NEW YORKER - JUNE 21 TH 2021Pepe Luis0% (1)
- The Times Magazine June 13 2021Document60 pagesThe Times Magazine June 13 2021Don José Antonio García-Trevijano ForteNo ratings yet
- THE TIMES - UK - JUNE 15 TH 2021Document80 pagesTHE TIMES - UK - JUNE 15 TH 2021Pepe LuisNo ratings yet
- TIME MAGAZINE - USA - JUNE 21 TH 2021Document102 pagesTIME MAGAZINE - USA - JUNE 21 TH 2021Pepe LuisNo ratings yet
- LISTENER - NEW ZEALAND - JUNE 19 TH 2021Document96 pagesLISTENER - NEW ZEALAND - JUNE 19 TH 2021Pepe LuisNo ratings yet
- China's Military Goals Threaten International Order, Nato WarnsDocument16 pagesChina's Military Goals Threaten International Order, Nato WarnsPepe LuisNo ratings yet
- FINANCIAL TIMES - USA - JUNE 16 TH 2021Document16 pagesFINANCIAL TIMES - USA - JUNE 16 TH 2021Pepe LuisNo ratings yet
- Scientific American - 2020-07Document75 pagesScientific American - 2020-07Anonymous rprdjdFMNzNo ratings yet
- Biden Warns Putin of Devastating' Repercussions If Navalny Dies in JailDocument18 pagesBiden Warns Putin of Devastating' Repercussions If Navalny Dies in JailPepe LuisNo ratings yet
- Halbersma R.S. - Geometry of Strings and Branes (2002)Document199 pagesHalbersma R.S. - Geometry of Strings and Branes (2002)Pepe LuisNo ratings yet
- Muhammad Ali Visual EncyclopediaDocument130 pagesMuhammad Ali Visual EncyclopediaPepe LuisNo ratings yet
- LOS ANGELES TIMES - JUNE 16 TH 2021Document36 pagesLOS ANGELES TIMES - JUNE 16 TH 2021Pepe LuisNo ratings yet
- Kursunoglu B., Et Al. (Eds.) - The Role of Neutrinos, Strings, Gravity, and Variable Cosmological Constant in Particle Physics (2002, Kluwer)Document284 pagesKursunoglu B., Et Al. (Eds.) - The Role of Neutrinos, Strings, Gravity, and Variable Cosmological Constant in Particle Physics (2002, Kluwer)ggggg100% (2)
- Texto A Is The Full Stop No Longer Necessary?Document4 pagesTexto A Is The Full Stop No Longer Necessary?Pepe LuisNo ratings yet
- Amato, Joseph C. - Galvez, Enrique Jose - Physics From Planet Earth - An Introduction To Mechanics-CRC Press (2015)Document604 pagesAmato, Joseph C. - Galvez, Enrique Jose - Physics From Planet Earth - An Introduction To Mechanics-CRC Press (2015)Pepe LuisNo ratings yet
- Yamaha RX-V671 - HTR-6064 - A710Document109 pagesYamaha RX-V671 - HTR-6064 - A710Никита НадтокаNo ratings yet
- Question and Answer For Master Oral ExaminationDocument86 pagesQuestion and Answer For Master Oral ExaminationJonathan McCarthy100% (1)
- Ultralinkfx 80Document100 pagesUltralinkfx 80PaulNo ratings yet
- Mid Sem ExamDocument2 pagesMid Sem ExamPiyush MaheshwariNo ratings yet
- Game Monitor Series: MODEL: VS-20475 VS-14428Document13 pagesGame Monitor Series: MODEL: VS-20475 VS-14428silgaNo ratings yet
- Part4 Communal Aerial System CAC-953Document14 pagesPart4 Communal Aerial System CAC-953Tammy Jim TanjutcoNo ratings yet
- Tropos 4310xaDocument19 pagesTropos 4310xaAnuta CosminNo ratings yet
- TM 11 5841 292 13&P Radar AltimeterDocument146 pagesTM 11 5841 292 13&P Radar Altimeterjoel alvaradoNo ratings yet
- Pub 127 BKDocument347 pagesPub 127 BKDarren ThomasNo ratings yet
- ADVENT OF POPULAR MEDIA (Himanshu Dhariwal)Document41 pagesADVENT OF POPULAR MEDIA (Himanshu Dhariwal)Himanshu Dhariwal 19-UJMC-0100% (1)
- Samson Media 7 Level Gauge DatasheetDocument10 pagesSamson Media 7 Level Gauge DatasheetYawar QureshiNo ratings yet
- FRAA DatasheetDocument2 pagesFRAA Datasheetliuxc111No ratings yet
- Wireless System: Online User Guide For Shure BLX Wireless System. Version: 4 (2019-H)Document28 pagesWireless System: Online User Guide For Shure BLX Wireless System. Version: 4 (2019-H)Anonymous EP0GKhfNo ratings yet
- Operating Instructions for Webasto Telestart T80 Remote Heater ControllerDocument13 pagesOperating Instructions for Webasto Telestart T80 Remote Heater ControllerAnonymous 1mkExF2CbnNo ratings yet
- A Novel DOA Estimation Method For Wideband Sources Based On Fuzzy SystemsDocument9 pagesA Novel DOA Estimation Method For Wideband Sources Based On Fuzzy SystemsOugraz hassanNo ratings yet
- Tutorial Antenna ADSDocument14 pagesTutorial Antenna ADSmariem abdiNo ratings yet
- sensorPM 8 5 ParadDocument2 pagessensorPM 8 5 ParadPaola PuentesNo ratings yet
- Mxtao PH DthesisDocument134 pagesMxtao PH DthesisSree ANo ratings yet
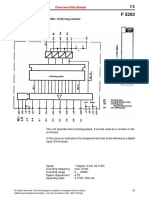
- Overview Data Sheets: F 5203: 14 Bit Ring CounterDocument2 pagesOverview Data Sheets: F 5203: 14 Bit Ring CountermohamadziNo ratings yet
- Aircraft Stand INS CoordinatesDocument14 pagesAircraft Stand INS CoordinatesCatalin CiocarlanNo ratings yet
- Fixed Wireless Access With 5G at Mid-BandsDocument9 pagesFixed Wireless Access With 5G at Mid-BandsChannuNo ratings yet
- DSU-33C/B Proximity Sensor: An All-Weather, Single-Mission Sensor Capable of Operating in ECM EnvironmentsDocument2 pagesDSU-33C/B Proximity Sensor: An All-Weather, Single-Mission Sensor Capable of Operating in ECM Environmentssd_hosseini_88No ratings yet
- N920 Nano Series - Operating Manual.v3.01Document93 pagesN920 Nano Series - Operating Manual.v3.01Minh HoàngNo ratings yet
- Space Based ADS-B Using NANOSATSDocument18 pagesSpace Based ADS-B Using NANOSATSELIM CHRISTIAN LIMBONGNo ratings yet
- Abby - Module 2 Lesson 3 1Document2 pagesAbby - Module 2 Lesson 3 1Kristine Novhea SuyaNo ratings yet
- 2022 Tutorial 1Document10 pages2022 Tutorial 1yamen.nasser7No ratings yet
- Tokyo Martis User Manual (En)Document32 pagesTokyo Martis User Manual (En)kyaw zin tun TunNo ratings yet
- 7 - Multi-Beam Antenna Technologies For 5G Wireless CommunicationsDocument18 pages7 - Multi-Beam Antenna Technologies For 5G Wireless Communicationsmaryam100% (1)
- Acurite Atlas HD Touchscreen MonitorpdfDocument12 pagesAcurite Atlas HD Touchscreen MonitorpdfreaveytNo ratings yet
- Information Sources & Signals: CECS 474 Computer Network InteroperabilityDocument20 pagesInformation Sources & Signals: CECS 474 Computer Network InteroperabilityJuan UrdanettNo ratings yet