You might also like
- Detoya Activity3Document17 pagesDetoya Activity3Jay Ian GeronaNo ratings yet
- Polytechnic Sultan Abdul Halim Mu'Adzam Shah Electrical Engineering Department Dee50122 - Circuit Analysis 2 Total Marks Clo1 /50Document1 pagePolytechnic Sultan Abdul Halim Mu'Adzam Shah Electrical Engineering Department Dee50122 - Circuit Analysis 2 Total Marks Clo1 /50ish070% (1)
- University of Illinois control systems homeworkDocument11 pagesUniversity of Illinois control systems homeworkSaied Aly SalamahNo ratings yet
- Matlab Tutorial 1Document29 pagesMatlab Tutorial 1KuAdenan KuSyakranNo ratings yet
- JEE-Main-20-07-2021-Shift-2 (Memory Based) Physics: Rms RmsDocument31 pagesJEE-Main-20-07-2021-Shift-2 (Memory Based) Physics: Rms RmsankushNo ratings yet
- Reflection & Refraction: - Z) / (Z +Z), / (Z +Z)Document38 pagesReflection & Refraction: - Z) / (Z +Z), / (Z +Z)amir amirNo ratings yet
- Solutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricDocument6 pagesSolutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricSalomé TorresNo ratings yet
- Notes LT3Document12 pagesNotes LT3veteron56No ratings yet
- Fulltext StampedDocument18 pagesFulltext StampedscarlettNo ratings yet
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1Document3 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1cataiceNo ratings yet
- Manolis KoliopoulosDocument58 pagesManolis KoliopoulosSushil MundelNo ratings yet
- Analytic Solutions of Fractional Differential Equation Associated With RLC Electrical CircuitDocument9 pagesAnalytic Solutions of Fractional Differential Equation Associated With RLC Electrical CircuitMohamed HelalNo ratings yet
- 5 Position Control IDocument16 pages5 Position Control Imstudent327No ratings yet
- System Modeling Part 2: Rotational Mechanical and Electromechanical SystemsDocument33 pagesSystem Modeling Part 2: Rotational Mechanical and Electromechanical SystemsHans Christian MacasaNo ratings yet
- Foot Atomic Solutions by Zhao, C.Document32 pagesFoot Atomic Solutions by Zhao, C.Jacob Francis94% (16)
- Modeling in The Frequency Domain: Prof. Ju-Jang LeeDocument32 pagesModeling in The Frequency Domain: Prof. Ju-Jang LeeMohammad HassanNo ratings yet
- Differential equation and response of an overdamped second order systemDocument5 pagesDifferential equation and response of an overdamped second order systemabaytekinovicNo ratings yet
- HhjkaDocument22 pagesHhjkaAshenafi AbuyeNo ratings yet
- Fulltext - Matlab Physical ProbDocument18 pagesFulltext - Matlab Physical ProbforudipsNo ratings yet
- Solucionario Cap 2 33-47Document9 pagesSolucionario Cap 2 33-47Gian Soriano MNo ratings yet
- SM212 Practice Test 3, Prof Joyner SolutionsDocument5 pagesSM212 Practice Test 3, Prof Joyner SolutionsHelbert PaatNo ratings yet
- AGRISJELYN-R._BSEE_EE416Document4 pagesAGRISJELYN-R._BSEE_EE416jasonaguilon99No ratings yet
- NEET SHM and Oscillations Important QuestionsDocument21 pagesNEET SHM and Oscillations Important Questionssapnasingh19951No ratings yet
- Ejercico TeoriaDocument5 pagesEjercico TeoriaFreddy ChimboNo ratings yet
- Control Engineering Assignment QuestionsDocument1 pageControl Engineering Assignment QuestionsAswath PNo ratings yet
- P2 FA10 - Derive EOM for periodic forced responseDocument36 pagesP2 FA10 - Derive EOM for periodic forced responseconcord1103No ratings yet
- Finite Element Modelling of Mooring Lines: O.M. Aamo, T.I. FossenDocument8 pagesFinite Element Modelling of Mooring Lines: O.M. Aamo, T.I. FossenSoledad AceitunoNo ratings yet
- Input Impedance of Transmission Line ProblemDocument24 pagesInput Impedance of Transmission Line ProblemZahraa TajAlssir AbouSwarNo ratings yet
- TU BKPHierarchyAdditionalSymmetriesFayIdentityAdlerShiotavanMoerbekeFormula LettMathPhys PDFDocument13 pagesTU BKPHierarchyAdditionalSymmetriesFayIdentityAdlerShiotavanMoerbekeFormula LettMathPhys PDFhelmantico1970No ratings yet
- Che374assign5 SolDocument11 pagesChe374assign5 Solgilberto mbulaNo ratings yet
- Code No: 45010Document8 pagesCode No: 45010SRINIVASA RAO GANTANo ratings yet
- 10.1 Laplace Transfer Functions For BuildingThermal ControlDocument7 pages10.1 Laplace Transfer Functions For BuildingThermal ControlMiguel Flores ZepedaNo ratings yet
- Cable modelling comparison of NODA and TYPE94 modelsDocument13 pagesCable modelling comparison of NODA and TYPE94 modelsJuan Pablo Holguin CardenasNo ratings yet
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاNo ratings yet
- Windkessel ProblemsDocument41 pagesWindkessel Problemsadh30No ratings yet
- College of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityDocument31 pagesCollege of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityFawzi RadwanNo ratings yet
- MATE2A2 Dirac Delta FunctionDocument4 pagesMATE2A2 Dirac Delta FunctionItemogeng Bernatt BabeNo ratings yet
- Generate & Analyze Analog SignalsDocument21 pagesGenerate & Analyze Analog SignalsjafferNo ratings yet
- 20 3 FRTHR Laplce TrnsformsDocument10 pages20 3 FRTHR Laplce Trnsformsfatcode27No ratings yet
- Complex Engineering Problem StatementDocument10 pagesComplex Engineering Problem StatementMuhammad MashamNo ratings yet
- NED University Electrical Engineering Lab Tasks Feedback Control SystemsDocument12 pagesNED University Electrical Engineering Lab Tasks Feedback Control SystemsdfdafdsfasdgNo ratings yet
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranNo ratings yet
- Filament Growth Rate Equation for Memristor Device ModelingDocument10 pagesFilament Growth Rate Equation for Memristor Device ModelingTamas ZefferNo ratings yet
- HwsDocument9 pagesHwshudha69No ratings yet
- 2014 3P4 Midterm 1 SolutionsDocument9 pages2014 3P4 Midterm 1 SolutionsIsibor CaptainNo ratings yet
- RMIT University: EEET2109 Mid Semester Test Answers (40 CharactersDocument4 pagesRMIT University: EEET2109 Mid Semester Test Answers (40 CharactersCollin lcwNo ratings yet
- Numerical Analysis of Engineering Systems Tutorial 8Document14 pagesNumerical Analysis of Engineering Systems Tutorial 8CKNo ratings yet
- Physical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy Solutions ManualDocument36 pagesPhysical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy Solutions Manuallelandsmith4rzm100% (23)
- Dwnload Full Physical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy Solutions Manual PDFDocument7 pagesDwnload Full Physical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy Solutions Manual PDFsithprisus100% (11)
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocument4 pagesTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNo ratings yet
- EmonopolDocument3 pagesEmonopolFlavio FontanaNo ratings yet
- Mathematical Model of Thyristor Inverter CircuitDocument6 pagesMathematical Model of Thyristor Inverter CircuitPacoFloresRodriguezNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- Heat Transfer Example ProblemsDocument8 pagesHeat Transfer Example ProblemsNick PapavizasNo ratings yet
- Massachusetts Institute of Technology: Solution For Problem 1Document7 pagesMassachusetts Institute of Technology: Solution For Problem 1Jeniffer OngNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Based On Problems Chapter 2-Transfer Functions of Physical Systems, Control System Engineering Fifth Edition, N.S.NiseDocument5 pagesBased On Problems Chapter 2-Transfer Functions of Physical Systems, Control System Engineering Fifth Edition, N.S.NiseMohammad Khairul Azmi Mohd KassimNo ratings yet
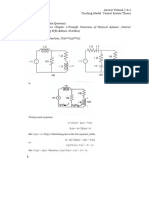
- Answer Tutorial2 ch2Document8 pagesAnswer Tutorial2 ch2Mohammad Khairul Azmi Mohd KassimNo ratings yet
- Answer Tutorial2 ch2Document8 pagesAnswer Tutorial2 ch2Mohammad Khairul Azmi Mohd KassimNo ratings yet
- Mechanical Properties and Its Testing MethodDocument9 pagesMechanical Properties and Its Testing MethodMohammad Khairul Azmi Mohd KassimNo ratings yet
- Syllabus Coverage Report-July23Document2 pagesSyllabus Coverage Report-July23Mech HoDNo ratings yet
- AY2010 CE2134 Hydraulics E04 First Law of Thermodynamics Frictional Losses in Pipe FlowsDocument18 pagesAY2010 CE2134 Hydraulics E04 First Law of Thermodynamics Frictional Losses in Pipe FlowsEmily ShumNo ratings yet
- SLR-HL-1 PDocument5,901 pagesSLR-HL-1 PKunal KambleNo ratings yet
- The Cosmos Companion: Material Properties Used in CosmosworksDocument23 pagesThe Cosmos Companion: Material Properties Used in Cosmosworksjontylee87No ratings yet
- Failure of Kobe Viaduct AnalysisDocument9 pagesFailure of Kobe Viaduct AnalysisPratik RaiNo ratings yet
- Principles of Polymer Engineering and ScienceDocument1 pagePrinciples of Polymer Engineering and SciencebishoyNo ratings yet
- Theoretical and Experimental Physics Undergraduate StudiesDocument4 pagesTheoretical and Experimental Physics Undergraduate Studieslepton15No ratings yet
- C 2Document11 pagesC 2RushmoreNo ratings yet
- CEE 117 Exam 2Document5 pagesCEE 117 Exam 2engr marcialawNo ratings yet
- Materi PPT (Metode Elemen Hingga)Document8 pagesMateri PPT (Metode Elemen Hingga)Ichsan QibrielNo ratings yet
- RC18 Column02Document8 pagesRC18 Column02assaad006No ratings yet
- 1.3-1.4-Density - Mass-VolumeDocument10 pages1.3-1.4-Density - Mass-VolumeNieL TianNo ratings yet
- Quantum Mechanics - Britannica Online Encyclopedia PDFDocument29 pagesQuantum Mechanics - Britannica Online Encyclopedia PDFMahesh MaheshwariNo ratings yet
- Homework 4 Solutions: Problem 6.2.2 (10 Points)Document7 pagesHomework 4 Solutions: Problem 6.2.2 (10 Points)amir sadighiNo ratings yet
- Kinematics Extra Study Questions: 41 Physics Problems ExplainedDocument165 pagesKinematics Extra Study Questions: 41 Physics Problems ExplainedjavnasNo ratings yet
- JPN MELAKA Physics KSSM Form 4 2021 Chapters 1-2 Measurements Force MotionDocument18 pagesJPN MELAKA Physics KSSM Form 4 2021 Chapters 1-2 Measurements Force MotionANG ZHEN LINGNo ratings yet
- Capacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yDocument5 pagesCapacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yKishore KumarNo ratings yet
- Basic Dynamics NumericalsDocument7 pagesBasic Dynamics Numericalsashok royNo ratings yet
- Fracture Mechanics: Stress Concentration and Fracture ToughnessDocument22 pagesFracture Mechanics: Stress Concentration and Fracture Toughnessaap1No ratings yet
- Experimental Measurement Moment of InertiaDocument34 pagesExperimental Measurement Moment of InertiayogagaNo ratings yet
- Box Culvert: A Civil Engineering ProjectDocument32 pagesBox Culvert: A Civil Engineering ProjectSTAR PRINTINGNo ratings yet
- MCQs Physics Book-1Document223 pagesMCQs Physics Book-1MannyNo ratings yet
- Conduction and Convection Heat Transfer Assignment-Week 3Document12 pagesConduction and Convection Heat Transfer Assignment-Week 3SAWAN KUMARNo ratings yet
- Boiling Water, Density, Specific Enthalpy, Heat, Dynamic Viscosity, Vaporization, Volume Heat 2Document3 pagesBoiling Water, Density, Specific Enthalpy, Heat, Dynamic Viscosity, Vaporization, Volume Heat 2shiel175No ratings yet
- KutunDocument12 pagesKutunJhon Edgar Pinilla VelasquezNo ratings yet
- Quest 8 KeyDocument7 pagesQuest 8 KeyWutWut0% (1)
- Suco Centrifugal Technical ExplanationsDocument16 pagesSuco Centrifugal Technical ExplanationsAdi AdrianNo ratings yet
- Vertical Irregularity Type 5 ExampleDocument4 pagesVertical Irregularity Type 5 ExampleAjay AgrawalNo ratings yet
- Mcqs On HeatDocument13 pagesMcqs On HeatParshantKumarBajajNo ratings yet
- CDP - AbaqusDocument16 pagesCDP - AbaqusClaudio PazNo ratings yet