You might also like
- How To Build Resonant Gravity Field CoilDocument7 pagesHow To Build Resonant Gravity Field Coilroyvalentik100% (1)
- The Complete Sailing Manual 3rd Edition PDFDocument450 pagesThe Complete Sailing Manual 3rd Edition PDFCodruţ Erașcu100% (2)
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsFrom EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsNo ratings yet
- DC Regulated Power Supply ExplainedDocument14 pagesDC Regulated Power Supply ExplainedMegha Projects100% (2)
- WSS Product Catalogue PDFDocument861 pagesWSS Product Catalogue PDFŞenol Memiş83% (6)
- Laptop Chip Level Repair Classroom NotesDocument108 pagesLaptop Chip Level Repair Classroom NotesRami Reddy100% (10)
- 8 COLREG Rules Every Navigating Officer Must UnderstandDocument25 pages8 COLREG Rules Every Navigating Officer Must UnderstandCodruţ Erașcu100% (3)
- Saab R5-Supreme-Navigation-System-Manual PDFDocument164 pagesSaab R5-Supreme-Navigation-System-Manual PDFPrashant S Nagwekar100% (1)
- Lloyd's Maritime Atlas of World Ports and Shipping - 179 PDFDocument179 pagesLloyd's Maritime Atlas of World Ports and Shipping - 179 PDFvupro219100% (1)
- Lesson 11: DC Transient AnalysisDocument81 pagesLesson 11: DC Transient AnalysisJoshua JapitanNo ratings yet
- Interpret Electronics SchematicsDocument53 pagesInterpret Electronics SchematicsPaul Martin Tan100% (4)
- Easy Antennas For The SWLDocument27 pagesEasy Antennas For The SWLAlicia BaresseNo ratings yet
- EMC Design Guide For PCBDocument78 pagesEMC Design Guide For PCBFaruq AhmedNo ratings yet
- 3 - Electrical System PDFDocument39 pages3 - Electrical System PDFnamduong3680% (1)
- Mini Self-Running GeneratorDocument12 pagesMini Self-Running Generatorgigi_shmen100% (1)
- Seaports of the World by Country: 835 Major Ports Listed by CountryDocument26 pagesSeaports of the World by Country: 835 Major Ports Listed by CountryDanyal ChaudharyNo ratings yet
- Development of Eddy Current Test Procedure For NonDocument8 pagesDevelopment of Eddy Current Test Procedure For NonIbnu KoharNo ratings yet
- Axial Flow Fans PDFDocument66 pagesAxial Flow Fans PDFCodruţ ErașcuNo ratings yet
- Applications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankNo ratings yet
- Major Accidents On ShipsDocument61 pagesMajor Accidents On ShipsGonçalo Cruzeiro100% (1)
- Faraday PDFDocument458 pagesFaraday PDFanon_865736968No ratings yet
- Ocimf BooksDocument4 pagesOcimf BooksCodruţ Erașcu100% (2)
- P11 2aDocument7 pagesP11 2aFachri MunadiNo ratings yet
- Physics IADocument13 pagesPhysics IAAnanyaNo ratings yet
- Thermal Metrology Assignment AtehDocument17 pagesThermal Metrology Assignment AtehATEH ARMSTRONG AKOTEHNo ratings yet
- Lecture On ConpensatorDocument48 pagesLecture On ConpensatorShojeb ShojolNo ratings yet
- Step 5 - To Make The Final Activity Individual Work: Student Diana Maria Garzón Henao Identification 1017163464Document11 pagesStep 5 - To Make The Final Activity Individual Work: Student Diana Maria Garzón Henao Identification 1017163464aibmasNo ratings yet
- PHY431 Slides Waves RevisedVersionBasedOnTribinoNotesDocument32 pagesPHY431 Slides Waves RevisedVersionBasedOnTribinoNotesVira RenaNo ratings yet
- Transformasi Fourier: Domain Waktu Domain FrekuensiDocument8 pagesTransformasi Fourier: Domain Waktu Domain FrekuensiRanto PardosiNo ratings yet
- Rapidly-varied flow and hydraulic jumps explainedDocument20 pagesRapidly-varied flow and hydraulic jumps explainedNABIN DHAKALNo ratings yet
- Rapidly-Varied Flow Is A Significant Change in Water Depth Over A Short Distance (A Few TimesDocument20 pagesRapidly-Varied Flow Is A Significant Change in Water Depth Over A Short Distance (A Few TimesasadNo ratings yet
- ESC3508 2 Transformations Into Linear FunctionsDocument7 pagesESC3508 2 Transformations Into Linear FunctionsNUR ATIQAH BINTI MOHD ROSLI / UPMNo ratings yet
- lecture17Document8 pageslecture17Outis WongNo ratings yet
- Step 5 - Carlos PrietoDocument11 pagesStep 5 - Carlos PrietoCarlosJulioPrietoVelozaNo ratings yet
- P10 11bDocument4 pagesP10 11bPrayoga AgustoNo ratings yet
- Lecture 21Document35 pagesLecture 21Karthik IlangoNo ratings yet
- VCE Physics - Yr 11 Essays and Projects 6285Document9 pagesVCE Physics - Yr 11 Essays and Projects 6285TimNguyenNo ratings yet
- 03handout PhysicsDocument3 pages03handout PhysicsTimothy KennedyNo ratings yet
- Problems 13 - Applications of Derivatives: 4 Ans: CM Sec 45Document9 pagesProblems 13 - Applications of Derivatives: 4 Ans: CM Sec 45jonahNo ratings yet
- Step 4-G12-Carlos Fernández EjerciciosDocument10 pagesStep 4-G12-Carlos Fernández EjerciciosCarlos FernandezNo ratings yet
- Analyze waves behavior in guided mediums and radiationDocument10 pagesAnalyze waves behavior in guided mediums and radiationCarlos Fernandez100% (1)
- Physiological monitoring circuit design and analysisDocument11 pagesPhysiological monitoring circuit design and analysisMaissa HassanNo ratings yet
- Sound WavesDocument26 pagesSound Wavesthinkiit100% (5)
- LAB 1 - Electronics For Transmission SystemsDocument19 pagesLAB 1 - Electronics For Transmission Systemspablo orellanaNo ratings yet
- Assignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CDocument5 pagesAssignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CGanesh KumarNo ratings yet
- Vibrations and Waves 3Document69 pagesVibrations and Waves 3Gika NurdianaNo ratings yet
- Harmonic MotionDocument5 pagesHarmonic MotionBluedevNo ratings yet
- 19 Flow II NotesDocument6 pages19 Flow II Notestemp_tsunNo ratings yet
- GNSS Surveying Lecture on GPS ErrorsDocument39 pagesGNSS Surveying Lecture on GPS Errorsciprian preda100% (1)
- Dynamic OceanographyDocument107 pagesDynamic Oceanographyayanbanerjee1No ratings yet
- EEE Lab Report on RLC Circuits and OPAMP Transfer FunctionsDocument16 pagesEEE Lab Report on RLC Circuits and OPAMP Transfer FunctionsNurullah TatarNo ratings yet
- Quiz - Viscous Flow Theory (Ae31010) Time: 120 Min.s Max + 15 Min.s Upload Time, Total Marks - 100Document3 pagesQuiz - Viscous Flow Theory (Ae31010) Time: 120 Min.s Max + 15 Min.s Upload Time, Total Marks - 100Divyansh RathiNo ratings yet
- Physics of Sound Formula SheetDocument2 pagesPhysics of Sound Formula SheetCANo ratings yet
- Wave PacketDocument7 pagesWave Packetimran hossainNo ratings yet
- Frequency Response Analysis of AmplifiersDocument41 pagesFrequency Response Analysis of AmplifiersBoudi ChouNo ratings yet
- PH 2Document10 pagesPH 2Ali RajaNo ratings yet
- Filter 2Document18 pagesFilter 2gaurav_juneja_4No ratings yet
- Step 5 - Fredy - MartinezDocument12 pagesStep 5 - Fredy - Martinezdaniela cordobaNo ratings yet
- Solution to AEA Physics 2003 Q1Document21 pagesSolution to AEA Physics 2003 Q1Rowena Fletcher-WoodNo ratings yet
- Note Physics 4 - Theory (Midterm) : 1. Vibration. ResonanceDocument10 pagesNote Physics 4 - Theory (Midterm) : 1. Vibration. ResonanceKha MaNo ratings yet
- PS01Document9 pagesPS01Sii Olog-olog PlonkNo ratings yet
- Kajian Numerik Transport Polutan Pada Akuifer Jenuh: Numerical Study of Pollutant Transport in Saturated AquiferDocument10 pagesKajian Numerik Transport Polutan Pada Akuifer Jenuh: Numerical Study of Pollutant Transport in Saturated AquiferMohRosidiNo ratings yet
- Wendy Johanna Moreno Diaz - Post TaskDocument13 pagesWendy Johanna Moreno Diaz - Post Taskwendy jhoanna moreno diazNo ratings yet
- Post Task - Daniel - CampoDocument17 pagesPost Task - Daniel - CampoaibmasNo ratings yet
- Autumn 2020: GVF Uf GVF RVF GVF RVF GVF RVF GVF RVFDocument8 pagesAutumn 2020: GVF Uf GVF RVF GVF RVF GVF RVF GVF RVFEman AhmedNo ratings yet
- Chapter 2 - Wave MotionDocument21 pagesChapter 2 - Wave MotionDennis KipkoechNo ratings yet
- PUCHADES - Are The Scattering and The Absorption Coefficients Two Faces of The Same Coin (2005)Document9 pagesPUCHADES - Are The Scattering and The Absorption Coefficients Two Faces of The Same Coin (2005)sifew77No ratings yet
- Inclass Ch23II SolveDocument2 pagesInclass Ch23II SolveChanceler KaneNo ratings yet
- Waves A Level Questions and AnswersDocument69 pagesWaves A Level Questions and AnswersBunya AnillyNo ratings yet
- EECS 16B RC Low-Pass Filter Bode Plot AnalysisDocument18 pagesEECS 16B RC Low-Pass Filter Bode Plot AnalysisBella ZionNo ratings yet
- Amplitude Intensity SoundwavesDocument23 pagesAmplitude Intensity SoundwavesJason LuNo ratings yet
- Ocean Water Waves IIDocument11 pagesOcean Water Waves IIVivek ReddyNo ratings yet
- S9-P5 Mrabti PaperDocument10 pagesS9-P5 Mrabti PaperGhita ZazNo ratings yet
- Acoustic Doppler Effect: 1.1 First Situation: Relative Motion of The ReceiverDocument8 pagesAcoustic Doppler Effect: 1.1 First Situation: Relative Motion of The ReceiverAshu RoxNo ratings yet
- MEK 4450 Marine Operations Kværner ASA / DNV, Fall 2012 Ch5 Mathematical ModelsDocument18 pagesMEK 4450 Marine Operations Kværner ASA / DNV, Fall 2012 Ch5 Mathematical ModelsdsrfgNo ratings yet
- PHYSICS - EQUATIONS (1) KdksaklsDocument2 pagesPHYSICS - EQUATIONS (1) KdksaklsKry9No ratings yet
- Presentation On Ground Wave PropagationDocument53 pagesPresentation On Ground Wave PropagationamitNo ratings yet
- Exp 5-7Document10 pagesExp 5-7abdul rehmanNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- SPOS Master The WeatherDocument95 pagesSPOS Master The WeatherCodruţ Erașcu100% (1)
- 6 Mistakes Master and Ship Staff Must Avoid On Ships With Dual Load LinesDocument8 pages6 Mistakes Master and Ship Staff Must Avoid On Ships With Dual Load LinesCodruţ Erașcu100% (1)
- 10 Points To Remember When Transiting A Narrow ChannelDocument6 pages10 Points To Remember When Transiting A Narrow ChannelCodruţ Erașcu100% (1)
- 5 Loadicator Tricks That Can Ease Your Life During Cargo OperationDocument21 pages5 Loadicator Tricks That Can Ease Your Life During Cargo OperationCodruţ ErașcuNo ratings yet
- Mooring Operations Manual: Marine Department Port of Tilbury London LimitedDocument48 pagesMooring Operations Manual: Marine Department Port of Tilbury London LimitedCodruţ ErașcuNo ratings yet
- 5 Questions That Can Help in Understanding of Squat Effect On ShipsDocument27 pages5 Questions That Can Help in Understanding of Squat Effect On ShipsCodruţ ErașcuNo ratings yet
- Safety CatalogueDocument138 pagesSafety CatalogueCodruţ ErașcuNo ratings yet
- Lashing Handbook For Marine Movements PDFDocument97 pagesLashing Handbook For Marine Movements PDFPankaj SabharwalNo ratings yet
- AMastersGuidetoBerthing2ndedition 2Document40 pagesAMastersGuidetoBerthing2ndedition 2Harish KumarNo ratings yet
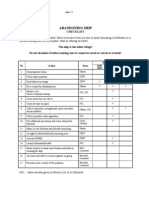
- Abandoning Ship Checklist StepsDocument1 pageAbandoning Ship Checklist StepsAgus SuhariantoNo ratings yet
- The Maritime Progress BookDocument67 pagesThe Maritime Progress BookCodruţ ErașcuNo ratings yet
- The Admiralty Digital Catalogue Practical TipsDocument11 pagesThe Admiralty Digital Catalogue Practical TipsCodruţ ErașcuNo ratings yet
- SPOS Master The WeatherDocument95 pagesSPOS Master The WeatherCodruţ Erașcu100% (1)
- OI ECDISPILOT 2.x STMDocument466 pagesOI ECDISPILOT 2.x STMCodruţ ErașcuNo ratings yet
- Code of SignalDocument1 pageCode of SignalCodruţ ErașcuNo ratings yet
- 世界上最美丽的英文 人生短篇Document28 pages世界上最美丽的英文 人生短篇Eng4Chinese100% (1)
- Catalogue and Indexes of San Charts and Other Hydrographic PublicationsDocument27 pagesCatalogue and Indexes of San Charts and Other Hydrographic PublicationsCodruţ ErașcuNo ratings yet
- Radar Performance FactorsDocument10 pagesRadar Performance FactorsCodruţ ErașcuNo ratings yet
- Ports of The WorldDocument22 pagesPorts of The WorldCodruţ ErașcuNo ratings yet
- Ainslie Heater Circuit by Patrick KellyDocument21 pagesAinslie Heater Circuit by Patrick KellyzonzofaceNo ratings yet
- Electronics Engineering Mastery Test 2 ECE Pre-BoardDocument33 pagesElectronics Engineering Mastery Test 2 ECE Pre-BoardXyNo ratings yet
- 00 General Catalogue 201617Document595 pages00 General Catalogue 201617Ara AkramNo ratings yet
- Hybrid Transformer Model For Transient Simulation-IDocument8 pagesHybrid Transformer Model For Transient Simulation-Ilepton1892No ratings yet
- Bhu 18Document10 pagesBhu 18Pranab HazraNo ratings yet
- Physical Sciences P1 May-June 2021 EngDocument20 pagesPhysical Sciences P1 May-June 2021 EngOFENTSE MORAKABINo ratings yet
- Physics Investigatory ProjectDocument8 pagesPhysics Investigatory ProjectYukti SharmaNo ratings yet
- Class Note 06: D'arsonval Movement and DC Measurement I. D'Arsonval Meter MovementDocument8 pagesClass Note 06: D'arsonval Movement and DC Measurement I. D'Arsonval Meter MovementHello WorldNo ratings yet
- Alternating Current: Unit 1 When You Complete This Objective You Will Be Able ToDocument69 pagesAlternating Current: Unit 1 When You Complete This Objective You Will Be Able TokumarkaulNo ratings yet
- Iecsymbolreference 150515173301 Lva1 App6891 PDFDocument56 pagesIecsymbolreference 150515173301 Lva1 App6891 PDFmarcospowerNo ratings yet
- Electrical Transformers and Rotating Machines 4th Edition Herman Solutions ManualDocument35 pagesElectrical Transformers and Rotating Machines 4th Edition Herman Solutions Manualspinifexcandock8zf100% (24)
- GTA-05 - Key & Sol'sDocument11 pagesGTA-05 - Key & Sol'smandaarapucollege123No ratings yet
- Design and Testing of Magnetic Torque Rods for Attitude ControlDocument24 pagesDesign and Testing of Magnetic Torque Rods for Attitude ControlAjayi Odushina AdedimejiNo ratings yet
- Differences between vibration and D'Arsonval galvanometersDocument9 pagesDifferences between vibration and D'Arsonval galvanometersNavin BhaskarNo ratings yet
- Cblephsu 03Document6 pagesCblephsu 03Saheb PriyadarshiNo ratings yet
- Projects: Magnetically Operated Gun With NE555Document14 pagesProjects: Magnetically Operated Gun With NE555PedrobarrozoNo ratings yet
- EE6504 Electrical Machines-II PDFDocument233 pagesEE6504 Electrical Machines-II PDFkumar m100% (1)
- Ics Notes by Polarao SirDocument184 pagesIcs Notes by Polarao Sirsanyasirao1100% (1)
- Cours Bob Ines Ferrite SDocument975 pagesCours Bob Ines Ferrite SJosé Miguel MartínezNo ratings yet