You might also like
- Chapter 4 - DC MachineDocument82 pagesChapter 4 - DC Machinepsksiva13No ratings yet
- Introduction To DC MachineDocument134 pagesIntroduction To DC MachineBharat SinghNo ratings yet
- Introduction To DC Machine: by Dr. Shubhobrata RudraDocument129 pagesIntroduction To DC Machine: by Dr. Shubhobrata RudraBhabani sankar KishanNo ratings yet
- Unit 3 - DC Machines - Part CDocument54 pagesUnit 3 - DC Machines - Part CMaribe TshegoNo ratings yet
- Electrical Machines: Key ConceptsDocument76 pagesElectrical Machines: Key ConceptsMohit BagurNo ratings yet
- EE 7 DC Machines Lecture SlidesDocument80 pagesEE 7 DC Machines Lecture SlidesYestin LusterioNo ratings yet
- EEN 112 - Unit 7Document63 pagesEEN 112 - Unit 7MRIDUL SHARMANo ratings yet
- DC Motor: Mod 3 CH 13Document57 pagesDC Motor: Mod 3 CH 13Abhijith Mohanan NNo ratings yet
- BEE UNIT-4 PPTDocument49 pagesBEE UNIT-4 PPTAarush PitlaNo ratings yet
- Unit 3Document88 pagesUnit 3thamizhan4341No ratings yet
- DC Machine - BeeeDocument59 pagesDC Machine - BeeesethukumarkNo ratings yet
- Three Phase Synchronous MachinesDocument41 pagesThree Phase Synchronous MachinesMausam BasnetNo ratings yet
- EM CH-4-5-6 Ac MachinesDocument80 pagesEM CH-4-5-6 Ac Machinesmuhammad.anas2007No ratings yet
- Basics and Working of AC Motors & Basics of Power GeneratorDocument37 pagesBasics and Working of AC Motors & Basics of Power GeneratorYasir ShaikhNo ratings yet
- BEE (21EEE15A) Module 3BDocument49 pagesBEE (21EEE15A) Module 3BG46Anand P KNo ratings yet
- Module 3-1Document53 pagesModule 3-1anishdeshmukh108No ratings yet
- SPE 2321 Lecture 3 & 4 and 5Document75 pagesSPE 2321 Lecture 3 & 4 and 5Martinez MutaiNo ratings yet
- Elementary GeneratorsDocument27 pagesElementary GeneratorsShiela SalvillaNo ratings yet
- Construction of Machine PDFDocument110 pagesConstruction of Machine PDFAvinash SinghNo ratings yet
- Sigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraDocument52 pagesSigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraBhavik PrajapatiNo ratings yet
- Module 4 Single Phase Induction Motor 1Document43 pagesModule 4 Single Phase Induction Motor 1saravananNo ratings yet
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Chapter 2Document53 pagesChapter 2Vince Dominich MadroneroNo ratings yet
- DC-MACH Chapter2Document52 pagesDC-MACH Chapter2marryjohnopalla05No ratings yet
- Permanent Magnet brushless DC Motor overviewDocument61 pagesPermanent Magnet brushless DC Motor overviewRishabhNo ratings yet
- (Iiird Mechanical/Industrial) Generator and Motor Electrical Technology Unit 4Document124 pages(Iiird Mechanical/Industrial) Generator and Motor Electrical Technology Unit 4signjpcoe100% (1)
- Answer For WorksheetDocument4 pagesAnswer For Worksheetabene danNo ratings yet
- Introduction To Electrical Machines: Prepared and Presented By: Syeda Amina AsgharDocument27 pagesIntroduction To Electrical Machines: Prepared and Presented By: Syeda Amina Asgharانیس ب ٹNo ratings yet
- DC Machines Fundamentals and CharacteristicsDocument64 pagesDC Machines Fundamentals and Characteristicsluiz pauloNo ratings yet
- Induction Motor - Double Field Revolving Theory - Universal MotorDocument24 pagesInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaNo ratings yet
- LEC - 11 (DCM Fundamentals)Document25 pagesLEC - 11 (DCM Fundamentals)zain malikNo ratings yet
- Unit-II PPT CPNDocument164 pagesUnit-II PPT CPNBifrost KingNo ratings yet
- Ac GeneratorDocument17 pagesAc Generatordineshsilambam2305No ratings yet
- Dynamo PartsDocument25 pagesDynamo Partskathy shiNo ratings yet
- Unit-Ii DC Machines: ConstructionDocument68 pagesUnit-Ii DC Machines: ConstructionbalaNo ratings yet
- DC Generator and Motor FundamentalsDocument234 pagesDC Generator and Motor Fundamentals413 YASH MANE100% (1)
- Electrical Machines EE-260 Lecture-04: Instructor: DR Mehmood AlamDocument17 pagesElectrical Machines EE-260 Lecture-04: Instructor: DR Mehmood AlamSaif Ur RehmanNo ratings yet
- Simple Ac GeneratorDocument17 pagesSimple Ac GeneratorRishi singhNo ratings yet
- Bab II.1 Mesin DC, Konstruksi Dan Prinsip KerjaDocument27 pagesBab II.1 Mesin DC, Konstruksi Dan Prinsip KerjaAditya RizkiNo ratings yet
- Long Examination 214Document4 pagesLong Examination 214Kobe Alcantara ReyesNo ratings yet
- EE-101 (Unit-5)Document81 pagesEE-101 (Unit-5)Chauhan AyushmaanNo ratings yet
- Understanding Synchronous Machines and Stepper MotorsDocument10 pagesUnderstanding Synchronous Machines and Stepper MotorsYUSRA MERAJNo ratings yet
- Lectures 7&8Document59 pagesLectures 7&8Yong Jian RongNo ratings yet
- Electrical Motors: ECE131 Basic Electrical & Electronics EnggDocument58 pagesElectrical Motors: ECE131 Basic Electrical & Electronics EnggVinamra MittalNo ratings yet
- MK. DASAR TEKNIK ELEKTRO GENERATOR LISTRIKDocument48 pagesMK. DASAR TEKNIK ELEKTRO GENERATOR LISTRIKJM4 - ANo ratings yet
- Basics of Electrical LectureDocument48 pagesBasics of Electrical Lectureraka priambadhaNo ratings yet
- Lecture4. DC Generators - 1.ppt - 0Document52 pagesLecture4. DC Generators - 1.ppt - 0abd rahim bin a.samatNo ratings yet
- a1f1b92938e0a8ebfd73d7bfe4036b0375fd310e51f1302c14b9ba63cb7fd5b1 Synchronous MachineDocument34 pagesa1f1b92938e0a8ebfd73d7bfe4036b0375fd310e51f1302c14b9ba63cb7fd5b1 Synchronous Machinefakeacc04aNo ratings yet
- Electric MachineDocument45 pagesElectric MachineravihbtiNo ratings yet
- ServomotorDocument25 pagesServomotorAbhirajNo ratings yet
- Electrical Machines: Induction Motors & Synchronous MachinesDocument42 pagesElectrical Machines: Induction Motors & Synchronous MachinesYoshua DylanNo ratings yet
- Temperature, Eddy Current & Stray Field Errors in DC MachinesDocument20 pagesTemperature, Eddy Current & Stray Field Errors in DC MachinesELON MUSKNo ratings yet
- Basics of Electrical TheoryDocument48 pagesBasics of Electrical TheoryReinhard Tetap SemangatNo ratings yet
- Electrical - Module 3 - Part 66 - DAY 24Document32 pagesElectrical - Module 3 - Part 66 - DAY 24irene pafraNo ratings yet
- A.C. Series MotorDocument16 pagesA.C. Series MotorM BNo ratings yet
- Principles of Electrical Machines V K MehtaDocument41 pagesPrinciples of Electrical Machines V K MehtaAsh Raf0% (2)
- SEAA 2032 - ELECTRICAL and MECHANICAL SYSTEM PART 2: INDUCTION MOTOR PRINCIPLESDocument33 pagesSEAA 2032 - ELECTRICAL and MECHANICAL SYSTEM PART 2: INDUCTION MOTOR PRINCIPLESHanis SyafiqNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- 24 Hysteresis-Motors Reference PDFDocument5 pages24 Hysteresis-Motors Reference PDFFariba Islam100% (2)
- 3 - Permanent-Magnet DC MotorsDocument23 pages3 - Permanent-Magnet DC MotorsFariba IslamNo ratings yet
- 3 - Permanent-Magnet DC MotorsDocument23 pages3 - Permanent-Magnet DC MotorsFariba IslamNo ratings yet
- Schrodinger Equation: B. Quantum TransportDocument8 pagesSchrodinger Equation: B. Quantum TransportFariba IslamNo ratings yet
- 7 - Hysteresis MotorDocument22 pages7 - Hysteresis MotorFariba IslamNo ratings yet
- Einstein & Brownian Motion - Expanding The Atomic Theory - Risin Expert SessionDocument8 pagesEinstein & Brownian Motion - Expanding The Atomic Theory - Risin Expert SessionHR RisinNo ratings yet
- Atomic Number, Mass Number, and IsotopesDocument24 pagesAtomic Number, Mass Number, and IsotopesB.Ed. Wing SundargarhNo ratings yet
- Welding Machines Monomig 200ikDocument1 pageWelding Machines Monomig 200ikLucioNo ratings yet
- Brochure MK4 Post TensioningDocument36 pagesBrochure MK4 Post Tensioningaev65No ratings yet
- Install HDPE Culverts for Drainage ProjectDocument3 pagesInstall HDPE Culverts for Drainage Projectjerryruki71No ratings yet
- MATH223 Lecture7 With SolutionDocument17 pagesMATH223 Lecture7 With SolutionRaymond AbesamisNo ratings yet
- ZX 75Document192 pagesZX 75vanhoackdNo ratings yet
- HW05Document4 pagesHW05Potatoes123No ratings yet
- Acr 1 Final 2021Document5 pagesAcr 1 Final 2021CAROLYN RhoeNo ratings yet
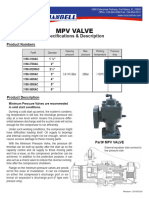
- Hanbell MPV Valve Spec SheetDocument1 pageHanbell MPV Valve Spec SheetDũng LêNo ratings yet
- HPLC - GCDocument28 pagesHPLC - GCTayyaba SadaqNo ratings yet
- SMIT Axial Piston Pumps PMVDocument37 pagesSMIT Axial Piston Pumps PMVJose Manuel Barroso PantojaNo ratings yet
- Underbalance Drilling SeminarDocument4 pagesUnderbalance Drilling Seminarmin thantNo ratings yet
- Lifting CalcDocument12 pagesLifting Calcwisnu_bayusaktiNo ratings yet
- RCC - Civil Engineering Objective QuestionsDocument9 pagesRCC - Civil Engineering Objective Questionsutsav_koshtiNo ratings yet
- Xenon Test Chambers: We Make Testing SimpleDocument9 pagesXenon Test Chambers: We Make Testing SimpleAman KumarNo ratings yet
- HM 289 Experiments With A Pelton Turbine Gunt 848 PDF 1 en GBDocument3 pagesHM 289 Experiments With A Pelton Turbine Gunt 848 PDF 1 en GBbeshirNo ratings yet
- Solving Quadratic FactoringDocument4 pagesSolving Quadratic FactoringMonica GrapeNo ratings yet
- Color in Computer GraphicDocument98 pagesColor in Computer GraphicReza AleeNo ratings yet
- Practical design of stepped columnsDocument14 pagesPractical design of stepped columnsFeba ThomasNo ratings yet
- Astm D4317 98Document3 pagesAstm D4317 98Abril CampuzanoNo ratings yet
- Agitators For MixerDocument5 pagesAgitators For MixerErkan TakNo ratings yet
- Physical Chemistry: Thermodynamics, Structure, and Change: Tenth Edition ART Powerpoint PresentationsDocument36 pagesPhysical Chemistry: Thermodynamics, Structure, and Change: Tenth Edition ART Powerpoint PresentationsVincent PradjinataNo ratings yet
- CH 02 HWDocument42 pagesCH 02 HWmasteringmastering12385% (20)
- ATV930 - Unidade de Frenagem e Resistencias de Frenagem - Nov2018Document8 pagesATV930 - Unidade de Frenagem e Resistencias de Frenagem - Nov2018Dyana GontijoNo ratings yet
- 731 Loss On Drying: Water Determination 921Document1 page731 Loss On Drying: Water Determination 921wilNo ratings yet
- ASME pressure testing code tableDocument4 pagesASME pressure testing code tableBohdan100% (1)
- Circles and Their AnglesDocument7 pagesCircles and Their AnglesDhawal PanchalNo ratings yet
- Branches of PhysicsDocument11 pagesBranches of PhysicsRahul JaiswalNo ratings yet
- Dynamic Design For AnchorsDocument6 pagesDynamic Design For AnchorsFlorin BodogaNo ratings yet