You might also like
- Fractions and Decimals Made EasyDocument50 pagesFractions and Decimals Made Easydsfsdf100% (2)
- Functional Description Manual MTU 6R Series 1600 MS13023Document94 pagesFunctional Description Manual MTU 6R Series 1600 MS13023Alberto F. Apablaza Meza100% (1)
- Basics of Olympiad Number TheoryDocument31 pagesBasics of Olympiad Number TheoryCharlosNo ratings yet
- 2b.definite Integration (102-114) FinalDocument13 pages2b.definite Integration (102-114) FinalSurya teja cvNo ratings yet
- An Intuitive Guide To Numerical Methods Heinold PDFDocument121 pagesAn Intuitive Guide To Numerical Methods Heinold PDFSamsu ArifNo ratings yet
- Operating Instructions: Diesel Engine 12V2000G65, G65-TB 16V2000G65, G65-TB 18V2000G65, G65-TB Application Group 3ADocument155 pagesOperating Instructions: Diesel Engine 12V2000G65, G65-TB 16V2000G65, G65-TB 18V2000G65, G65-TB Application Group 3APetrus GunturNo ratings yet
- Operating Instructions: Diesel Engine 12V2000G65, G65-TB 16V2000G65, G65-TB 18V2000G65, G65-TB Application Group 3ADocument155 pagesOperating Instructions: Diesel Engine 12V2000G65, G65-TB 16V2000G65, G65-TB 18V2000G65, G65-TB Application Group 3APetrus GunturNo ratings yet
- Gendrive S4000 engine nomenclature updateDocument9 pagesGendrive S4000 engine nomenclature updatemohsen_cumminsNo ratings yet
- Parts of The CircleDocument8 pagesParts of The CircleMari CelNo ratings yet
- 2020 JC 2 H2 Math Consolidation Test (Solutions)Document14 pages2020 JC 2 H2 Math Consolidation Test (Solutions)Timothy HandokoNo ratings yet
- Indefinite Integration - DPP 05 (Extra DPP) - (Prayas 2.0 2023 PW Star)Document3 pagesIndefinite Integration - DPP 05 (Extra DPP) - (Prayas 2.0 2023 PW Star)Deep SarkarNo ratings yet
- mcq06 Maths Q+SDocument7 pagesmcq06 Maths Q+SGangadhara CNo ratings yet
- Target: Pre - Medical: 2024: Classroom Contact ProgrammeDocument21 pagesTarget: Pre - Medical: 2024: Classroom Contact ProgrammeShuchita SinghNo ratings yet
- A2 Level Trigonometry Revision: Three Further Trig RatiosDocument7 pagesA2 Level Trigonometry Revision: Three Further Trig RatiosLauren ChikwehwaNo ratings yet
- CBSE 2019 Maths Question Paper Class 12 With Solutions - Free PDFDocument22 pagesCBSE 2019 Maths Question Paper Class 12 With Solutions - Free PDFPriyanshi KhandelwalNo ratings yet
- Inverse Trigonometric Function-04 - Exercise-1Document7 pagesInverse Trigonometric Function-04 - Exercise-1Raju SinghNo ratings yet
- TS - SR - Maths Iib - Imp Questions-2023-24Document6 pagesTS - SR - Maths Iib - Imp Questions-2023-24jaashwanand09No ratings yet
- Maths Important QuestionsDocument24 pagesMaths Important QuestionsSharth kumar ShettyNo ratings yet
- Inverse Trigonometric Substitution IntegralsDocument32 pagesInverse Trigonometric Substitution Integralshariz syazwanNo ratings yet
- 2019 YIJC Paper 1 Suggested SolutionsDocument14 pages2019 YIJC Paper 1 Suggested SolutionsGeorge ChooNo ratings yet
- RI 2023 MATH TP SOLNDocument17 pagesRI 2023 MATH TP SOLNVenkateswaran Gayathri (Bbss)No ratings yet
- SR - Maths Iib - Imp Questions-2024Document6 pagesSR - Maths Iib - Imp Questions-2024ow123aisNo ratings yet
- 765 P2 Limta 2021Document4 pages765 P2 Limta 2021Bonglav JemasonNo ratings yet
- TS - SR - Maths Iib - Imp Questions-2023-24Document6 pagesTS - SR - Maths Iib - Imp Questions-2023-24p5bmt8njqwNo ratings yet
- New Maths IIB Question Bank 1Document7 pagesNew Maths IIB Question Bank 1MadamsettyNo ratings yet
- Single Correct Answer TypeDocument76 pagesSingle Correct Answer TypeSuryakamalBourishettyNo ratings yet
- Cumulative Test # 2 (Q) PDFDocument2 pagesCumulative Test # 2 (Q) PDFManavSaksariaNo ratings yet
- SIQ Maths 2024 Vivek SirDocument25 pagesSIQ Maths 2024 Vivek SirmangalametaiahNo ratings yet
- MATHEMATICS exam questions and solutionsDocument27 pagesMATHEMATICS exam questions and solutionsRupesh SNo ratings yet
- Chapterwise Practice TestDocument19 pagesChapterwise Practice Testmayukhsarkar100No ratings yet
- RT 1 TrigonometryDocument4 pagesRT 1 TrigonometryNishtha SinghNo ratings yet
- Differentiation Test 07 April 2024Document2 pagesDifferentiation Test 07 April 2024JEE MathematicsNo ratings yet
- Khulna University: ECE DisciplineDocument2 pagesKhulna University: ECE DisciplineTI NafisNo ratings yet
- SR Mat 2B Smart QNSDocument6 pagesSR Mat 2B Smart QNSbr686c9bdjNo ratings yet
- Inverse Trigonometric FunctionsDocument10 pagesInverse Trigonometric Functionskppandey090909No ratings yet
- Sma 2270 Ass Tie, Abe July 2021Document3 pagesSma 2270 Ass Tie, Abe July 2021Davy einsteinNo ratings yet
- General Instructions:: Guess Paper - 2010 Subject - Maths Class - XIIDocument3 pagesGeneral Instructions:: Guess Paper - 2010 Subject - Maths Class - XIIjnvdwdNo ratings yet
- Code 1 PC Only EnglishDocument5 pagesCode 1 PC Only EnglishJainNo ratings yet
- Unit 2Document31 pagesUnit 2aviNo ratings yet
- Lecture 4 Self Review SolutionsDocument2 pagesLecture 4 Self Review SolutionsGareth WongNo ratings yet
- CBSE Board Class XII Mathematics Board Paper 2013 Delhi Set - 1Document5 pagesCBSE Board Class XII Mathematics Board Paper 2013 Delhi Set - 1Steve SmithNo ratings yet
- TS - SR - Maths Iib - Imp Questions BNJC 2023-24Document6 pagesTS - SR - Maths Iib - Imp Questions BNJC 2023-24nanimuhirajNo ratings yet
- Marks Outcome H3: Logx (Ab) (A)Document7 pagesMarks Outcome H3: Logx (Ab) (A)SasukeNo ratings yet
- X X Cos Sin X X Sin Cos: X X X X Cos Sin Cos Sin X X X X Sin Cos Sin CosDocument7 pagesX X Cos Sin X X Sin Cos: X X X X Cos Sin Cos Sin X X X X Sin Cos Sin CosAsmitNo ratings yet
- Limits - Practice SheetDocument11 pagesLimits - Practice SheetDattatrayNo ratings yet
- MATHEMATICS SECOND TERMINAL EXAMINATION 2011-12Document4 pagesMATHEMATICS SECOND TERMINAL EXAMINATION 2011-12Shubhadeep BiswasNo ratings yet
- MATHS ASSIGNMENT - 32Document5 pagesMATHS ASSIGNMENT - 32Param shahNo ratings yet
- Mathematics: Time Allowed: 3 Hours Maximum Marks: 100 General InstructionsDocument27 pagesMathematics: Time Allowed: 3 Hours Maximum Marks: 100 General InstructionsPrachi DwivediNo ratings yet
- Mid-Term ExaminationDocument4 pagesMid-Term ExaminationGabriel RamosNo ratings yet
- The Hindu Senior Secondary School.: Model Papers - Ii Mathematics Class - XiiDocument3 pagesThe Hindu Senior Secondary School.: Model Papers - Ii Mathematics Class - XiiabiNo ratings yet
- XII - Maths - Chapter 7 - DEFINITE INTEGRATION (87-99) PDFDocument13 pagesXII - Maths - Chapter 7 - DEFINITE INTEGRATION (87-99) PDFNdjskaNo ratings yet
- MATHEMATICS PAPER – I (ADVANCED) MULTIPLE CHOICE QUESTIONSDocument4 pagesMATHEMATICS PAPER – I (ADVANCED) MULTIPLE CHOICE QUESTIONSwimpy lNo ratings yet
- m1 Mod4Document2 pagesm1 Mod4honey1002No ratings yet
- Math 1220 Calculus 2 Final Sample 1 - Winter 01Document3 pagesMath 1220 Calculus 2 Final Sample 1 - Winter 01Tyler CameronNo ratings yet
- Double Integrals in Polar FormDocument29 pagesDouble Integrals in Polar FormMan YanNo ratings yet
- SR Maths Iib Set-4Document2 pagesSR Maths Iib Set-4sambaguntupalli4No ratings yet
- 2017 11 Sample Paper Mathematics 01 QPDocument3 pages2017 11 Sample Paper Mathematics 01 QPdiamondpickaxe218No ratings yet
- Sample Question Paper 1: Section ADocument5 pagesSample Question Paper 1: Section Agunjan bhalikaNo ratings yet
- Inverse Trigonometric Functions _ DPP 06Document2 pagesInverse Trigonometric Functions _ DPP 06jeemainsmaterial97No ratings yet
- Step Test #2 PhysicsDocument6 pagesStep Test #2 PhysicsSheikh SaadNo ratings yet
- Integration Formulas and TechniquesDocument8 pagesIntegration Formulas and Techniquesfatin HumairaNo ratings yet
- Important Maths Questions for TS Inter ExamsDocument6 pagesImportant Maths Questions for TS Inter ExamsKota ๖ۣۜRαkͥesͣhͫNo ratings yet
- Week-01 - Seqence & Series - Topic Wise Master Copy-01Document17 pagesWeek-01 - Seqence & Series - Topic Wise Master Copy-01Panshul KumarNo ratings yet
- Areas of IntegrationDocument13 pagesAreas of IntegrationHoney Grace Silmaro CaballesNo ratings yet
- CBSE Class 12 Maths Sample Paper Set 4Document3 pagesCBSE Class 12 Maths Sample Paper Set 4Piyasa MandalNo ratings yet
- Maths Class Xii Mock Test Paper 01 For 2017 18Document4 pagesMaths Class Xii Mock Test Paper 01 For 2017 18aaryangargNo ratings yet
- Function Solution DTS-4Document3 pagesFunction Solution DTS-4Krish AgrawalNo ratings yet
- Kombinasi @1600 KWDocument4 pagesKombinasi @1600 KWPetrus GunturNo ratings yet
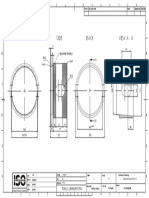
- Surface Finishing: - Diamond Knurls Pitch 14Document1 pageSurface Finishing: - Diamond Knurls Pitch 14Petrus GunturNo ratings yet
- PG Spec 12V4000DS2000 2080kVA 3D FC 50HzDocument5 pagesPG Spec 12V4000DS2000 2080kVA 3D FC 50HzPetrus GunturNo ratings yet
- Kombinasi @380 KWDocument4 pagesKombinasi @380 KWPetrus GunturNo ratings yet
- Iphone 11 Pro Max 03404876 InfoDocument2 pagesIphone 11 Pro Max 03404876 InfoPetrus GunturNo ratings yet
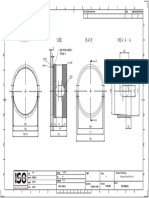
- Surface Finishing: - Diamond Knurls Pitch 14Document1 pageSurface Finishing: - Diamond Knurls Pitch 14Petrus GunturNo ratings yet
- Operating Instructions: Gas Engine 12 V 4000 L62 16 V 4000 L62Document187 pagesOperating Instructions: Gas Engine 12 V 4000 L62 16 V 4000 L62Petrus GunturNo ratings yet
- Operating Instructions: Gas Engine 12 V 4000 L62 16 V 4000 L62Document187 pagesOperating Instructions: Gas Engine 12 V 4000 L62 16 V 4000 L62Petrus GunturNo ratings yet
- A A A A A A A A A: Voltmeter VoltmeterDocument1 pageA A A A A A A A A: Voltmeter VoltmeterPetrus GunturNo ratings yet
- Power Generation Solutions Guide Provides Insights into MTU's Clean and Efficient ProductsDocument45 pagesPower Generation Solutions Guide Provides Insights into MTU's Clean and Efficient ProductsPetrus GunturNo ratings yet
- Exercises English For PAT Petra Grade 3Document4 pagesExercises English For PAT Petra Grade 3Petrus GunturNo ratings yet
- Sheet Denomination for Generator Panel ComponentsDocument15 pagesSheet Denomination for Generator Panel ComponentsPetrus GunturNo ratings yet
- Power Generation Solutions Guide Provides Insights into MTU's Clean and Efficient ProductsDocument45 pagesPower Generation Solutions Guide Provides Insights into MTU's Clean and Efficient ProductsPetrus GunturNo ratings yet
- Operating InstructionsDocument155 pagesOperating InstructionsPetrus Guntur0% (1)
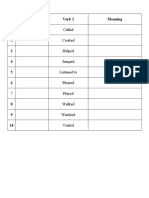
- Regular VerbDocument2 pagesRegular VerbPetrus GunturNo ratings yet
- 2543 33130 T5 SolutionDocument6 pages2543 33130 T5 SolutionPetrus GunturNo ratings yet
- Regular Verb2Document2 pagesRegular Verb2Petrus GunturNo ratings yet
- Regular Verb 3Document2 pagesRegular Verb 3Petrus GunturNo ratings yet
- Complete The SentencesDocument1 pageComplete The SentencesPetrus GunturNo ratings yet
- Homework III Solution: 1 Section 2.3Document4 pagesHomework III Solution: 1 Section 2.3Э. ӨсөхбаярNo ratings yet
- Add Maths Crash Course 2022Document16 pagesAdd Maths Crash Course 2022Raveena SinghNo ratings yet
- Forum Geometricum 2014 Vol 14 1Document47 pagesForum Geometricum 2014 Vol 14 1Deviana DarmawanNo ratings yet
- Graphs of Various FunctionsDocument4 pagesGraphs of Various FunctionsLouis RileyNo ratings yet
- Absolute Value FunctionsDocument4 pagesAbsolute Value FunctionsJohnnyLuanKhaiTuanNo ratings yet
- Quant Checklist 09 PDF 2022 by Aashish AroraDocument81 pagesQuant Checklist 09 PDF 2022 by Aashish AroraVidushi PandeyNo ratings yet
- 5 MensurationDocument28 pages5 MensurationAmro BoudyNo ratings yet
- Rational FunctionsDocument22 pagesRational FunctionsRisshi Mae LumbreNo ratings yet
- Math10 q2 Mod7 Thedistanceformulaanditsapplication v5Document31 pagesMath10 q2 Mod7 Thedistanceformulaanditsapplication v5Mikaela MotolNo ratings yet
- Homework Questions 4 - Finding The Equation of A Line Given Two PointsDocument1 pageHomework Questions 4 - Finding The Equation of A Line Given Two PointsLalith77No ratings yet
- Chapter Notes - Continuity and DifferentiationDocument43 pagesChapter Notes - Continuity and DifferentiationMirdhuNo ratings yet
- TRIGOOOOOOOOOOOOOrdDocument3 pagesTRIGOOOOOOOOOOOOOrdMaria Luira Elisa BercesNo ratings yet
- Lecture in CalculusDocument36 pagesLecture in CalculusJovelynBrozasBihisNo ratings yet
- Math 537 - Ordinary Differential Equations: Lecture Notes - Method of FrobeniusDocument53 pagesMath 537 - Ordinary Differential Equations: Lecture Notes - Method of FrobeniusBerkay EkenNo ratings yet
- Objective: - Identify and Describe Terms Related To CircleDocument16 pagesObjective: - Identify and Describe Terms Related To CircleDarlyn LegaspiNo ratings yet
- Grade 7 Math Lesson Plan on Basic Geometric ConstructionsDocument31 pagesGrade 7 Math Lesson Plan on Basic Geometric ConstructionsKimberly CJ SermoniaNo ratings yet
- Answers To Coursebook Exercises: 1 Integers, Powers and RootsDocument4 pagesAnswers To Coursebook Exercises: 1 Integers, Powers and RootsEva RobertsNo ratings yet
- Remainder factor theorem long divisionDocument5 pagesRemainder factor theorem long divisionShehzad QureshiNo ratings yet
- DLL Mathematics-5 q2 W6-CraftedDocument5 pagesDLL Mathematics-5 q2 W6-Craftedmazie lopezNo ratings yet
- Lecture 2: Roots of Equation: Dr. Nor Alafiza YunusDocument62 pagesLecture 2: Roots of Equation: Dr. Nor Alafiza YunusHaziq KhairiNo ratings yet
- Second Quarter Math Summative Test 1stDocument3 pagesSecond Quarter Math Summative Test 1stPascua RobelynNo ratings yet
- Conic Sections FormulasDocument2 pagesConic Sections FormulasMulti talented IndiaNo ratings yet
- MMC Turning Inserts Catalog en PDFDocument109 pagesMMC Turning Inserts Catalog en PDFkarthikeyanNo ratings yet
- Perfect Score WordDocument127 pagesPerfect Score WordMdHaziq SyahminNo ratings yet
- Practice Test 8 Math Level 2: Answer SheetDocument22 pagesPractice Test 8 Math Level 2: Answer SheetKai Chung TamNo ratings yet