You might also like
- Improving Skills for the Electricity Sector in IndonesiaFrom EverandImproving Skills for the Electricity Sector in IndonesiaNo ratings yet
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Integrated Super Charger 173471Document150 pagesIntegrated Super Charger 173471lsaty123No ratings yet
- Smart Grid Congestion Caused by Plug-In Electric Vehicle ChargingDocument5 pagesSmart Grid Congestion Caused by Plug-In Electric Vehicle ChargingHgoglezNo ratings yet
- Exhaust Gas Heat Recovery Power GenerationDocument52 pagesExhaust Gas Heat Recovery Power GenerationabhinavkarthickNo ratings yet
- Designing & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingDocument10 pagesDesigning & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingIJRASETPublicationsNo ratings yet
- Effect of Electrical Vehicle Charging On Power QualityDocument6 pagesEffect of Electrical Vehicle Charging On Power QualityIEEE PROJECTS MICANS INFOTECH100% (1)
- Double Stage Single Phase Hybrid Stand Alone Solar Inverter: A Project ReportDocument37 pagesDouble Stage Single Phase Hybrid Stand Alone Solar Inverter: A Project ReportSaloni JangidNo ratings yet
- Modelling and Simulation of Power System of Battery, Solar and Fuel Cell Powered Hybrid Electric VehicleDocument6 pagesModelling and Simulation of Power System of Battery, Solar and Fuel Cell Powered Hybrid Electric VehicleHgoglezNo ratings yet
- Review On Electrical VehicleDocument25 pagesReview On Electrical VehicleRavi Sankar MadineniNo ratings yet
- Wireless Charging System For EVDocument5 pagesWireless Charging System For EVShubham RajNo ratings yet
- Wired and Wireless Charging of EVDocument7 pagesWired and Wireless Charging of EVShubham RajNo ratings yet
- Wireless Charging of Electric VehiclesDocument7 pagesWireless Charging of Electric VehiclesElena Paul ElenaNo ratings yet
- Vehicle To GridDocument7 pagesVehicle To GridSurajRGuptaNo ratings yet
- v2g ReportDocument95 pagesv2g Reportsavita malisNo ratings yet
- A Technology Review Paper For Drives Used in Electrical Vehicle (EV) & Hybrid Electrical Vehicles (HEV)Document5 pagesA Technology Review Paper For Drives Used in Electrical Vehicle (EV) & Hybrid Electrical Vehicles (HEV)Satyam GuptaNo ratings yet
- Battery Energy Storage System Connected To A Three-Phase 50 Hz-Grid (PDFDrive)Document171 pagesBattery Energy Storage System Connected To A Three-Phase 50 Hz-Grid (PDFDrive)ankitNo ratings yet
- SEPIC Project ReportDocument102 pagesSEPIC Project Reportmusarraf172No ratings yet
- Impact of Electric Vehicles On The Grid WML W VideoDocument10 pagesImpact of Electric Vehicles On The Grid WML W VideoSuyash TiwariNo ratings yet
- V2G Introduction, Operation, Benefits and ChallengesDocument41 pagesV2G Introduction, Operation, Benefits and ChallengesAdisuNo ratings yet
- A Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridDocument6 pagesA Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridZunAib AliNo ratings yet
- Design Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan DDocument6 pagesDesign Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan Dmohd786azharNo ratings yet
- Inductive Power Transfer For Transportation ApplicationsDocument24 pagesInductive Power Transfer For Transportation ApplicationsRoopini SankarNo ratings yet
- Design and Analysis of On-Road Charging Electric Vehicle (OLEV)Document5 pagesDesign and Analysis of On-Road Charging Electric Vehicle (OLEV)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Electrical Vehicle (EV) Charging Station SolutionsDocument7 pagesElectrical Vehicle (EV) Charging Station Solutionsc3controlsNo ratings yet
- The State of Electric Mobility and Policy Landscape in BangladeshDocument5 pagesThe State of Electric Mobility and Policy Landscape in Bangladeshgeo: green collaborationNo ratings yet
- Major DocumentDocument61 pagesMajor DocumentLE-224 MeghanaReddyNo ratings yet
- SRMDocument60 pagesSRMKrupa KaranNo ratings yet
- MJR ppt-1Document15 pagesMJR ppt-1teslaNo ratings yet
- Inductive Charging of EV'sDocument17 pagesInductive Charging of EV'sShashank DaniNo ratings yet
- MPPT Based Optimal Charge Controller in PV SystemDocument37 pagesMPPT Based Optimal Charge Controller in PV SystemMalik Sameeullah100% (2)
- Analysis On Bidirectional Interactive Electric Vehicles Operation Modes Vehicle-To-Grid (V2G) and Gridto-Vehicle (G2V) Variations Within Smart GridDocument26 pagesAnalysis On Bidirectional Interactive Electric Vehicles Operation Modes Vehicle-To-Grid (V2G) and Gridto-Vehicle (G2V) Variations Within Smart Gridsuman shahNo ratings yet
- Wireless Charging Impact on Electric VehiclesDocument22 pagesWireless Charging Impact on Electric VehiclesÇhàñđ BäshàNo ratings yet
- Thesis On Solar Power ProjectDocument113 pagesThesis On Solar Power ProjectYatheesh KaggereNo ratings yet
- Harmonicsreduction Technique of 48 Pulse Converter With Pi Controller For Electric Vehicle Fast ChargerDocument9 pagesHarmonicsreduction Technique of 48 Pulse Converter With Pi Controller For Electric Vehicle Fast ChargerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Multilevel Inverter - Final Report - 14031208 PDFDocument45 pagesMultilevel Inverter - Final Report - 14031208 PDFUmar AkhtarNo ratings yet
- HEVDocument40 pagesHEVVwila NyirendaNo ratings yet
- Electrical Vehicle Workshop UKPN PDFDocument42 pagesElectrical Vehicle Workshop UKPN PDFDaniel PrataNo ratings yet
- EVCS Palo Alto Presentation Final Rev. 11.18.16Document54 pagesEVCS Palo Alto Presentation Final Rev. 11.18.16Manikanta SwamyNo ratings yet
- MHD Power Generation ExplainedDocument15 pagesMHD Power Generation ExplainedMANN BATTISENo ratings yet
- Charging Stations SolutionsDocument16 pagesCharging Stations SolutionsPradeep DahiyaNo ratings yet
- Solar Panel Tracking and Monitoring SystemDocument8 pagesSolar Panel Tracking and Monitoring SystemGRD JournalsNo ratings yet
- Modelling and Simulation of MPPT Controlled Grid Connected InverterDocument64 pagesModelling and Simulation of MPPT Controlled Grid Connected InverterRam Kumar GogadaNo ratings yet
- Bidirectional DC DC ConverterDocument5 pagesBidirectional DC DC ConverterJAIRAJ MIRASHINo ratings yet
- High Step-up DC-DC Converter: 3-Winding Coupled Inductor DesignDocument44 pagesHigh Step-up DC-DC Converter: 3-Winding Coupled Inductor DesignSriramNo ratings yet
- 932620.11.17 RFP - Hiring of Consultant For Electric Vehicle (13112017Document36 pages932620.11.17 RFP - Hiring of Consultant For Electric Vehicle (13112017SubhashiniNo ratings yet
- EE CPP Final Project 3rd YearDocument32 pagesEE CPP Final Project 3rd YearShaikh ZeeshanNo ratings yet
- MPPT Based PV System For Partial ShadingDocument73 pagesMPPT Based PV System For Partial ShadingSwarnav MajumderNo ratings yet
- Assignment 1 - EVDocument10 pagesAssignment 1 - EVAnaakooNo ratings yet
- Smart Power Grid SystemDocument64 pagesSmart Power Grid SystemNikhil GawandeNo ratings yet
- Electric Vehicle Seminar-1Document4 pagesElectric Vehicle Seminar-1Sandeep RajakNo ratings yet
- Solar and Wind IntegrationDocument14 pagesSolar and Wind IntegrationAbhinav ShuklaNo ratings yet
- Boost DC voltage with a simple DC-DC converter circuitDocument3 pagesBoost DC voltage with a simple DC-DC converter circuitFawwaaz HoseinNo ratings yet
- ENERGY HARVESTING FOOTSTEPS PIEZOELECTRICDocument2 pagesENERGY HARVESTING FOOTSTEPS PIEZOELECTRICcamila0% (1)
- Hybrid PowerDocument30 pagesHybrid PowerSameer WahabNo ratings yet
- Regen Electro Sensing Car with Intelligent BrakingDocument71 pagesRegen Electro Sensing Car with Intelligent BrakingSyed AwaisNo ratings yet
- Supercapacitor and Battery Power Management For Hybrid Vehicle ApplicationsDocument64 pagesSupercapacitor and Battery Power Management For Hybrid Vehicle Applicationspgngurunad17100% (4)
- Placement of Charging StationsDocument12 pagesPlacement of Charging StationsEduard TomaNo ratings yet
- Project On StatcomDocument59 pagesProject On StatcomKranthiNo ratings yet
- Chapter 2Document20 pagesChapter 2Saman Brookhim100% (4)
- Akira 14hs9n 3y01Document15 pagesAkira 14hs9n 3y01Su BarkahNo ratings yet
- TFT-LCD TV/DVD Combo Owner S ManualDocument126 pagesTFT-LCD TV/DVD Combo Owner S ManualMilagros Margarita Reina HerreraNo ratings yet
- B Techpeoples EeDocument4 pagesB Techpeoples Eeravi maheshwariNo ratings yet
- Multiplex JR BOMDocument6 pagesMultiplex JR BOMCristobalzqNo ratings yet
- Endeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationDocument8 pagesEndeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationJNarigonNo ratings yet
- Victron Freedom Won Lifepo4 Batteries - Freedom Won Lite and EtowerDocument16 pagesVictron Freedom Won Lifepo4 Batteries - Freedom Won Lite and EtowerAmer AlmansoryNo ratings yet
- ProjectDocument8 pagesProjectAnb BajwaNo ratings yet
- 2013-14 Ns2 Project Titles - ME / MtechDocument3 pages2013-14 Ns2 Project Titles - ME / MtechPantech Proed Pvt Ltd.,No ratings yet
- 870 KF Titrino Plus: ManualDocument108 pages870 KF Titrino Plus: ManualIman Mahardika EgaNo ratings yet
- Power Transformer: Laminated CoreDocument8 pagesPower Transformer: Laminated Coreraymond baliteNo ratings yet
- Distributed SPCDocument106 pagesDistributed SPCKamal Singh RathoreNo ratings yet
- APJ Abdul Kalam Technological University S3 Exam ResultsDocument18 pagesAPJ Abdul Kalam Technological University S3 Exam ResultsKillerrootNo ratings yet
- SMART ANTENNA SYSTEMS: TECHNIQUES, EVOLUTION, APPLICATIONSDocument25 pagesSMART ANTENNA SYSTEMS: TECHNIQUES, EVOLUTION, APPLICATIONSRavi Joshi0% (1)
- STK0460P: Switching Regulator ApplicationsDocument8 pagesSTK0460P: Switching Regulator ApplicationsMustapha Amine JemniNo ratings yet
- Variable Gear Ratio Steering Diagnostics and DTC Check GuideDocument8 pagesVariable Gear Ratio Steering Diagnostics and DTC Check GuideNickNo ratings yet
- rs485 ManualDocument9 pagesrs485 ManualTouch SanluangNo ratings yet
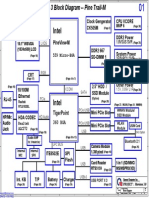
- Lenovo Ideapad S10-3 Schematic - Quanta Mariana 3.0 Pine Trail-M Schematic - FL5 Motherboard PDFDocument40 pagesLenovo Ideapad S10-3 Schematic - Quanta Mariana 3.0 Pine Trail-M Schematic - FL5 Motherboard PDFachyouth50% (2)
- ID FLX Lite 1 3 OperatorGuide ComapDocument19 pagesID FLX Lite 1 3 OperatorGuide ComapMahesh MirajkarNo ratings yet
- How To Avoid EMC Problems in PCB DesignDocument16 pagesHow To Avoid EMC Problems in PCB DesignChaitali Choudhary100% (1)
- Is 2026 (Part-1) Specification For Power Transformer-GeneralDocument25 pagesIs 2026 (Part-1) Specification For Power Transformer-Generalkarthikeyan25783% (6)
- 3Gb/s SDI For Transport of 1080p50/60, 3D, UHDTV1 / 4k and BeyondDocument23 pages3Gb/s SDI For Transport of 1080p50/60, 3D, UHDTV1 / 4k and Beyondplinio_de_paulaNo ratings yet
- Semiconductor KTA1661: Technical DataDocument2 pagesSemiconductor KTA1661: Technical DataahmedNo ratings yet
- Planning of Optimal Power SystemsDocument9 pagesPlanning of Optimal Power Systemsaliscribd46No ratings yet
- Microprocessor Lab1Document17 pagesMicroprocessor Lab1Abdul HadiNo ratings yet
- Relay Coordination Techniques Using SoftwareDocument4 pagesRelay Coordination Techniques Using Softwarerobertovm2002No ratings yet
- Relay Automotive Catalog 0212Document150 pagesRelay Automotive Catalog 0212nubercard6111No ratings yet
- Disjuntor Siemens SBDocument98 pagesDisjuntor Siemens SBjoaoNo ratings yet
- ETHERNET Powerlink: User's ManualDocument98 pagesETHERNET Powerlink: User's ManualHolicsNo ratings yet
- Profinet 1Document39 pagesProfinet 1taghiNo ratings yet