You might also like
- Optimal Energy Management For Solar-Powered CarsDocument189 pagesOptimal Energy Management For Solar-Powered CarsMohammad Hafiz OthmanNo ratings yet
- Abdelkrim Khelif, Ali Adibi Eds. Phononic Crystals Fundamentals and ApplicationsDocument247 pagesAbdelkrim Khelif, Ali Adibi Eds. Phononic Crystals Fundamentals and Applicationsjhoan gaviriaNo ratings yet
- Load Flow AnalysisDocument38 pagesLoad Flow Analysisoluwasesan salauNo ratings yet
- Control of Voltage Source Inverters Using PWMDocument48 pagesControl of Voltage Source Inverters Using PWMManohar DakaNo ratings yet
- Electrical Power DistributionDocument3 pagesElectrical Power DistributionRustha123100% (1)
- Assignment - 9 - Due Date - 03-12-2019 - Complex Engineering ProblemDocument1 pageAssignment - 9 - Due Date - 03-12-2019 - Complex Engineering ProblemAzizurrehman AwanNo ratings yet
- 8 Generation Capacity Reliability Assessment PDFDocument81 pages8 Generation Capacity Reliability Assessment PDFShoaib SamiNo ratings yet
- Admittance Matrix FormulationDocument3 pagesAdmittance Matrix FormulationJuls BactonNo ratings yet
- A Three-Phase Power Flow Solution Method For Unbalanced Distribution NetworksDocument8 pagesA Three-Phase Power Flow Solution Method For Unbalanced Distribution NetworkshassanNo ratings yet
- Power System Operation and ControlDocument14 pagesPower System Operation and Controlindhu.cs75% (4)
- Electrical Machine Lab ManualDocument84 pagesElectrical Machine Lab ManualUtkarsh RajNo ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Newton-Raphson Method For Power Flow Equations in Matlab EnvironmentDocument5 pagesNewton-Raphson Method For Power Flow Equations in Matlab Environmentashikhmd4467No ratings yet
- Matlab ProgramDocument20 pagesMatlab Programpuneethkumarr100% (3)
- Energy Research Center BrochureDocument2 pagesEnergy Research Center Brochureamer4411No ratings yet
- 4.reliability in Electrical SystemsDocument31 pages4.reliability in Electrical SystemsCharles OndiekiNo ratings yet
- Report WritingDocument19 pagesReport WritingMalik Nazim ChannarNo ratings yet
- Chapter 8Document17 pagesChapter 8Yanendra SahNo ratings yet
- Micro TeachingDocument15 pagesMicro TeachingWahyu Kunto WibowoNo ratings yet
- Power System Planning: PGPEPS204T Elective IIIDocument2 pagesPower System Planning: PGPEPS204T Elective IIIRajesh BhaskarlaNo ratings yet
- Museum Gallery Layout and Their Interactions PDFDocument392 pagesMuseum Gallery Layout and Their Interactions PDFRhea Michelle CaballeroNo ratings yet
- Chapter 1 RegDocument34 pagesChapter 1 RegAlebel AyalnehNo ratings yet
- Power System Reliability Assessment: Keynote Address OnDocument61 pagesPower System Reliability Assessment: Keynote Address OnkuncoroNo ratings yet
- Course Title of Energy Conversion and Rural ElectrificationDocument2 pagesCourse Title of Energy Conversion and Rural Electrificationollata kalano100% (1)
- Simulation of Power System Transient DisturbancesDocument6 pagesSimulation of Power System Transient DisturbancesAhmed58seribegawanNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- Pawah's Sd260uy ResearchDocument15 pagesPawah's Sd260uy ResearchFrans PawahNo ratings yet
- Motor de Induccion ETAPDocument20 pagesMotor de Induccion ETAPgabriel_87No ratings yet
- Dual-Three Phase Induction Machine Drives Control-A Survey: Extended SummaryDocument11 pagesDual-Three Phase Induction Machine Drives Control-A Survey: Extended SummaryMoyasserengAlattarNo ratings yet
- Calculations and Designs of Lighting Scheme PDFDocument12 pagesCalculations and Designs of Lighting Scheme PDFAzmeraw Zedebre WorkNo ratings yet
- DR Lalit Goel: Nanyang Technological University, SingaporeDocument126 pagesDR Lalit Goel: Nanyang Technological University, SingaporeKavita ChaurasiaNo ratings yet
- Basic Design and Operation: RelayDocument5 pagesBasic Design and Operation: RelaysweetsureshNo ratings yet
- 5.power System RepresentationDocument34 pages5.power System RepresentationTakawiraNo ratings yet
- Smart GridDocument30 pagesSmart GridkumarchaturvedulaNo ratings yet
- M.Tech Power System PDFDocument30 pagesM.Tech Power System PDFRaja RamachandranNo ratings yet
- Matrix Converter PrincipleDocument20 pagesMatrix Converter Principleprasidsyam100% (1)
- Ch.1 Load Forecasting 1Document9 pagesCh.1 Load Forecasting 1Yogesh DabholeNo ratings yet
- Reliability Analyses of Electrical Distribution System: A Case StudyDocument9 pagesReliability Analyses of Electrical Distribution System: A Case StudyHddjdjNo ratings yet
- Job Advertisement - TbsDocument11 pagesJob Advertisement - TbsRashid BumarwaNo ratings yet
- Optimal Renewable Resources Mix For Distribution System Energy Loss MinimizationDocument11 pagesOptimal Renewable Resources Mix For Distribution System Energy Loss MinimizationVi RS100% (1)
- Power System Load ModellingDocument45 pagesPower System Load Modellingquangspkt100% (2)
- Chapter 13 PduDocument57 pagesChapter 13 Pduarslan khalidNo ratings yet
- DC Motor - Drive 2019Document80 pagesDC Motor - Drive 2019ali ramadanNo ratings yet
- Project Work On Automatic Control of Bottle Filling Sysstem by Using PLC With Conveyor ModelDocument2 pagesProject Work On Automatic Control of Bottle Filling Sysstem by Using PLC With Conveyor Modeldhirajsingh_avitNo ratings yet
- Installation Chapter 3Document6 pagesInstallation Chapter 3goitom01No ratings yet
- HazardsDocument20 pagesHazardsgpuonlineNo ratings yet
- AHP - TutorialDocument21 pagesAHP - TutorialBenhassineMedaliNo ratings yet
- Becoming Supporters of Allah'S Religion!: First KhutbahDocument13 pagesBecoming Supporters of Allah'S Religion!: First KhutbahSapto Sutardi100% (1)
- Electrical Engineering Questions-3Document1 pageElectrical Engineering Questions-3tutulkarNo ratings yet
- Final ThesisDocument62 pagesFinal ThesisTemesgen TolchaNo ratings yet
- Revised Both Curri 2021-V3Document107 pagesRevised Both Curri 2021-V3mezigebu100% (1)
- Matlab ProgramingDocument32 pagesMatlab ProgramingKorlpate BhaskarNo ratings yet
- Matrix Converter - Reading NotesDocument4 pagesMatrix Converter - Reading NotesAnsar NiaziNo ratings yet
- EE1401 POWER SYSTEM OPERATION AND CONTROL - Two Marks Questions and Answer & QBDocument16 pagesEE1401 POWER SYSTEM OPERATION AND CONTROL - Two Marks Questions and Answer & QBAmruthNo ratings yet
- Question Bank: Department of Electrical and Electronics EngineeringDocument12 pagesQuestion Bank: Department of Electrical and Electronics EngineeringSubramaniam GnanasekaranNo ratings yet
- Power System Operation and ControlDocument9 pagesPower System Operation and ControlranjithrawalNo ratings yet
- PSOC - 2 MarksDocument13 pagesPSOC - 2 MarksfvijayamiNo ratings yet
- FINAL Psoc Reg-2013Document14 pagesFINAL Psoc Reg-2013nirmalrajjNo ratings yet
- PSOC 2 Marks With AnswerDocument10 pagesPSOC 2 Marks With AnswerAnbalagan GuruNo ratings yet
- Question Bank: Department of Electrical and Electronics EngineeringDocument12 pagesQuestion Bank: Department of Electrical and Electronics EngineeringPrakashNo ratings yet
- Pressure Voltage: Chapter Review QuestionsDocument16 pagesPressure Voltage: Chapter Review QuestionsPrakash Chandran CNo ratings yet
- Academic Year: Year/Semester: Course Code & Title:: DEPARTMENT OFDocument1 pageAcademic Year: Year/Semester: Course Code & Title:: DEPARTMENT OFPrakash Chandran CNo ratings yet
- Personal File New FormatDocument5 pagesPersonal File New FormatPrakash Chandran CNo ratings yet
- Spoken-Tutorial Project, IIT Bombay: E-BrochureDocument4 pagesSpoken-Tutorial Project, IIT Bombay: E-BrochurePrakash Chandran CNo ratings yet
- Branch and Year: I YEARDocument4 pagesBranch and Year: I YEARPrakash Chandran CNo ratings yet
- Branch and Year: I YEARDocument4 pagesBranch and Year: I YEARPrakash Chandran CNo ratings yet
- Branch and Year: EEE & I YEAR: JCT College of Engineering and Technology, Coimbatore Lesson PlanDocument3 pagesBranch and Year: EEE & I YEAR: JCT College of Engineering and Technology, Coimbatore Lesson PlanPrakash Chandran CNo ratings yet
- Ourse ILE Ndex Department of Electrical & Electronics EngineeringDocument1 pageOurse ILE Ndex Department of Electrical & Electronics EngineeringPrakash Chandran CNo ratings yet
- Internal Exam - III-PSTDocument2 pagesInternal Exam - III-PSTPrakash Chandran CNo ratings yet
- EE6010-hvdc SyllabusDocument2 pagesEE6010-hvdc SyllabusPrakash Chandran CNo ratings yet
- BEEE Lesson PlanDocument3 pagesBEEE Lesson PlanPrakash Chandran CNo ratings yet
- PST Lesson PlanDocument3 pagesPST Lesson PlanPrakash Chandran CNo ratings yet
- JCT College of Engineering and Technology: Pichanur, Coimbatore-641105, India ISO 9001:2008 Certified InstitutionDocument16 pagesJCT College of Engineering and Technology: Pichanur, Coimbatore-641105, India ISO 9001:2008 Certified InstitutionPrakash Chandran CNo ratings yet
- Power System 2Document46 pagesPower System 2Prakash Chandran CNo ratings yet
- Basic Electrical EngineeringDocument181 pagesBasic Electrical EngineeringPrakash Chandran CNo ratings yet
- Handbook of Dynamic MeasurementsDocument217 pagesHandbook of Dynamic MeasurementsronfrendNo ratings yet
- Transducer Notes Vtu (Electrical and Electronics Measurement and Instrumentation)Document50 pagesTransducer Notes Vtu (Electrical and Electronics Measurement and Instrumentation)Narayan S. Burbure50% (4)
- Photo Luminescence of Surfaces and InterfacesDocument25 pagesPhoto Luminescence of Surfaces and InterfacesNick KellerNo ratings yet
- VLSI Technology Dr. Nandita Dasgupta Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 38 CMOS TechnologyDocument25 pagesVLSI Technology Dr. Nandita Dasgupta Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 38 CMOS TechnologysrividyabadavathNo ratings yet
- All-In-One Electronics Guide Your Complete Ultimate Guide To Understanding and Utilizing Electronics!Document469 pagesAll-In-One Electronics Guide Your Complete Ultimate Guide To Understanding and Utilizing Electronics!cerraman-191% (11)
- Build An Infrasonic MicrophoneDocument6 pagesBuild An Infrasonic MicrophoneTrunggana Abdul W100% (1)
- PROJECTDocument13 pagesPROJECTWOLVERINEffNo ratings yet
- Important Notice: Kind RegardsDocument8 pagesImportant Notice: Kind Regardsrohitsingh2909No ratings yet
- K4D261638FDocument18 pagesK4D261638F9183290782No ratings yet
- Altronic III Service Manual (Form ALT III SM)Document26 pagesAltronic III Service Manual (Form ALT III SM)francis_mouille_ii100% (3)
- Co-Po MappingDocument2 pagesCo-Po MappingVijay MNo ratings yet
- TV Panasonic Tcp42x60Document29 pagesTV Panasonic Tcp42x60JulioCesarMartinezNo ratings yet
- BJT PDFDocument14 pagesBJT PDFRaka Satria PradanaNo ratings yet
- Maximum Power TransferDocument22 pagesMaximum Power TransferadriannenicNo ratings yet
- Ec102 ExpsheetsDocument69 pagesEc102 ExpsheetsMansimran Singh-iit GuwahatiNo ratings yet
- LG 60LB5800 ZM 60LB580V ZM LD46B.Document85 pagesLG 60LB5800 ZM 60LB580V ZM LD46B.Cristea Gabriel100% (1)
- Bcs25eb ManualDocument4 pagesBcs25eb ManualFlávio De Jesus SilvaNo ratings yet
- Service Manual: Active Subwoofer Speaker SystemDocument16 pagesService Manual: Active Subwoofer Speaker SystemJonathan Vasquez ConeoNo ratings yet
- 04 - Clock Generator 8284ADocument10 pages04 - Clock Generator 8284AThe Common YoutuberNo ratings yet
- Photocouplers and Photorelays: Selection Guide 2019Document48 pagesPhotocouplers and Photorelays: Selection Guide 2019jimmy146No ratings yet
- 2009 H2 Physics - YJC PDFDocument58 pages2009 H2 Physics - YJC PDFEndi FendiNo ratings yet
- Semiconductor TechnologiesDocument502 pagesSemiconductor TechnologiesQuan Le100% (1)
- Infrared Kird9001e PDFDocument43 pagesInfrared Kird9001e PDFinspagintNo ratings yet
- STN4402 StansonTechnologyDocument6 pagesSTN4402 StansonTechnologyBoris ȚepeșNo ratings yet
- 2SK2632LS: Ultrahigh-Speed Switching ApplicationsDocument5 pages2SK2632LS: Ultrahigh-Speed Switching Applicationsd.c.delatorre2200No ratings yet
- PDF Basic Electronics Course Humphrey Kimathi DLDocument95 pagesPDF Basic Electronics Course Humphrey Kimathi DLmehrab babaeiNo ratings yet
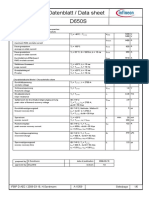
- Datenblatt / Data Sheet D650S: Elektrische EigenschaftenDocument6 pagesDatenblatt / Data Sheet D650S: Elektrische EigenschaftenCess FaridilNo ratings yet
- Datasheet Transistor 20n60a4Document8 pagesDatasheet Transistor 20n60a4sudipta_kolNo ratings yet
- ELE232 - Chapter 1 - Semiconductor (Compatibility Mode) - 4Document8 pagesELE232 - Chapter 1 - Semiconductor (Compatibility Mode) - 4Irfan SypherNo ratings yet