You might also like
- FrictionDocument92 pagesFrictionstallone21No ratings yet
- Friction: Classical MechanicsDocument12 pagesFriction: Classical MechanicsAhmad KoujanNo ratings yet
- Friction Is The Force Resisting The Relative Motion of Solid SurfacesDocument2 pagesFriction Is The Force Resisting The Relative Motion of Solid SurfacesGunda LadkaNo ratings yet
- Friction: Name: Wael Atiah Dhedan Bardi Grad:First Stage Subject: Chemical Engineering PrinciplesDocument6 pagesFriction: Name: Wael Atiah Dhedan Bardi Grad:First Stage Subject: Chemical Engineering PrinciplesSara AlyousifNo ratings yet
- About FrictionDocument4 pagesAbout FrictionRian SteveNo ratings yet
- Tribology Module-2Document42 pagesTribology Module-2Vyshu SonuNo ratings yet
- MCE321 - Friction Lecture NoteDocument6 pagesMCE321 - Friction Lecture NoteBright OvieNo ratings yet
- An Assignment On FrictionDocument15 pagesAn Assignment On FrictionWasiur Rahman100% (1)
- Vehicle Tribology: Concept of FrictionDocument35 pagesVehicle Tribology: Concept of Frictionjamesv52_743942786No ratings yet
- Friction. Classification of Friction. Coefficient of Friction. İntroduction and ClassificationDocument7 pagesFriction. Classification of Friction. Coefficient of Friction. İntroduction and ClassificationAbdulla CamalNo ratings yet
- FrictionDocument1 pageFrictionChang DiNo ratings yet
- L 25. NLM - Friction - Mecanism and LawsDocument12 pagesL 25. NLM - Friction - Mecanism and LawsArvind TiwariNo ratings yet
- Tribology 17me742: What Is Friction?Document31 pagesTribology 17me742: What Is Friction?Vyshu Sonu100% (1)
- Chapter 3Document51 pagesChapter 3muhaba muhamedNo ratings yet
- Deutz Fahr Rear Axle T 7336 Workshop ManualDocument23 pagesDeutz Fahr Rear Axle T 7336 Workshop Manualcindybennettmd040595jbw100% (124)
- Jose Mari GiangoDocument2 pagesJose Mari GiangojosemargiangooNo ratings yet
- Unit 5Document84 pagesUnit 5Prasanna Sekar100% (1)
- Group Members:, SherazDocument18 pagesGroup Members:, SherazMuhammad FahadNo ratings yet
- TRIBOLOGYDocument3 pagesTRIBOLOGYElyk TakataNo ratings yet
- Tribology Lab 1Document7 pagesTribology Lab 1Jeremiah MolaletsiNo ratings yet
- Chapter 2 FinalDocument26 pagesChapter 2 FinalTamirat NemomsaNo ratings yet
- New Microsoft Office Word DocumentDocument8 pagesNew Microsoft Office Word Documentvermaz2deepNo ratings yet
- FrictionDocument8 pagesFrictionAarhan KhanNo ratings yet
- Physics Final ProjectDocument22 pagesPhysics Final ProjectyashNo ratings yet
- Types of FrictionDocument3 pagesTypes of FrictionCathyNo ratings yet
- Co-Efficient of Static FrictionDocument9 pagesCo-Efficient of Static Frictionatul_gangwar0% (1)
- 021 G12 STEM Newton's Law of Motion CDocument7 pages021 G12 STEM Newton's Law of Motion CMariaNo ratings yet
- How Does Oil Work?: Oil Reduces The Harmful Forces of FrictionDocument8 pagesHow Does Oil Work?: Oil Reduces The Harmful Forces of FrictionArvind Sangeeta KothariNo ratings yet
- Static and Kinetic FrictionDocument20 pagesStatic and Kinetic FrictionIan Gabriel Gatdula MoraNo ratings yet
- Friction in Daily LifeDocument20 pagesFriction in Daily LifeAnondo SarbabidyaNo ratings yet
- Nature of FrictionDocument2 pagesNature of FrictionMuhammad MosaNo ratings yet
- What Is The Snow (By SWIX)Document35 pagesWhat Is The Snow (By SWIX)CyrillNo ratings yet
- Friction From Meriam PDF 161228121738 PDFDocument62 pagesFriction From Meriam PDF 161228121738 PDFTHEOPHILUS ATO FLETCHERNo ratings yet
- Applied Mechanics Chapter 3 FrictionDocument25 pagesApplied Mechanics Chapter 3 FrictionHari PyakurelNo ratings yet
- Co Efficient of Static FrictionDocument9 pagesCo Efficient of Static FrictionShiraz NajatNo ratings yet
- Tribology PresentationDocument10 pagesTribology Presentations s s sNo ratings yet
- TRIBOLOGY AssignmentDocument20 pagesTRIBOLOGY Assignmentmunish0875No ratings yet
- Size-Scale E Ects On The Friction Coe CientDocument10 pagesSize-Scale E Ects On The Friction Coe CientSwapnil PawarNo ratings yet
- Activity No. 8: Theory of DiscussionDocument7 pagesActivity No. 8: Theory of DiscussionAris PamintuanNo ratings yet
- Nanoscale Effects of Friction, Adhesion and Electrical Conduction in AFM ExperimentsDocument49 pagesNanoscale Effects of Friction, Adhesion and Electrical Conduction in AFM ExperimentsSyd BarrettNo ratings yet
- Chp4-Friction 29122022Document39 pagesChp4-Friction 29122022abdurhman suleimanNo ratings yet
- Friction: Chapter OutlineDocument12 pagesFriction: Chapter OutlineUsama AlmalakiNo ratings yet
- Lectures ON Friction (Introduction and Basic Theories)Document17 pagesLectures ON Friction (Introduction and Basic Theories)sneha KumariNo ratings yet
- Mae 493n 593t Lec6Document24 pagesMae 493n 593t Lec6kostas.sierros9374No ratings yet
- E102 - AgustinDocument20 pagesE102 - AgustinSeth Jarl G. AgustinNo ratings yet
- Chapter - 10: Force and Friction (Part - 3)Document2 pagesChapter - 10: Force and Friction (Part - 3)ARSHAD JAMILNo ratings yet
- Friction: by Associate Professor Mechanical Engineering Department Malaviya National Institute of Technology, JaipurDocument45 pagesFriction: by Associate Professor Mechanical Engineering Department Malaviya National Institute of Technology, JaipurAbhishek SharmaNo ratings yet
- Dry Friction 2021Document69 pagesDry Friction 2021Tuhafeni HailekaNo ratings yet
- Project Report 00Document21 pagesProject Report 00aparajit5054No ratings yet
- Friction Between SolidsDocument28 pagesFriction Between SolidsVictor TomacinschiiNo ratings yet
- Newton's 3rd Law of Motion and FrictionDocument15 pagesNewton's 3rd Law of Motion and FrictionXy FloresNo ratings yet
- Tribology - NOTEDocument58 pagesTribology - NOTEmarkmanuelagbezibeNo ratings yet
- Frottement Glace NeigeDocument20 pagesFrottement Glace NeigeneNo ratings yet
- Physics - FrictionDocument11 pagesPhysics - FrictionJosh, LRTNo ratings yet
- MEE3219 E D: Ngineering YnamicsDocument7 pagesMEE3219 E D: Ngineering YnamicsSoonyeowYongNo ratings yet
- FrictionDocument2 pagesFrictionZain AlviNo ratings yet
- Friction of Low-Dimensional Nanomaterial Systems: Eview ArticleDocument17 pagesFriction of Low-Dimensional Nanomaterial Systems: Eview ArticleGirish GuptaNo ratings yet
- What Friction IsDocument1 pageWhat Friction IsligmaNo ratings yet
- An Introduction To A New Topic : Bushara Abdulkareem NO:37 1 Semester B.Ed PhysicalscienceDocument22 pagesAn Introduction To A New Topic : Bushara Abdulkareem NO:37 1 Semester B.Ed PhysicalsciencebushNo ratings yet
- Appendix 6.1 Structural Repairs To RCC Columns, Beams and SlabsDocument4 pagesAppendix 6.1 Structural Repairs To RCC Columns, Beams and SlabsNirmal KishorNo ratings yet
- Calculate_newTax_2024-25_21-04-2024Document6 pagesCalculate_newTax_2024-25_21-04-2024Nirmal KishorNo ratings yet
- Documents Attached With The ReturnDocument1 pageDocuments Attached With The ReturnNirmal KishorNo ratings yet
- Adarh Public School: Cheque: Drop BoxDocument1 pageAdarh Public School: Cheque: Drop BoxNirmal KishorNo ratings yet
- Exchange The Position of The Frogs at Both Sides. Those With IQ Higher Than 50 Should Be Able To Finish This Within 3 MinutesDocument2 pagesExchange The Position of The Frogs at Both Sides. Those With IQ Higher Than 50 Should Be Able To Finish This Within 3 MinutesNirmal KishorNo ratings yet
- Adarsh Public School: C-Block, Vikas PuriDocument1 pageAdarsh Public School: C-Block, Vikas PuriNirmal KishorNo ratings yet
- Adarsh Public School: C-Block, Vikas PuriDocument2 pagesAdarsh Public School: C-Block, Vikas PuriNirmal KishorNo ratings yet
- Schedule of Sharing Video Lectures On Teams App Classes - V A& B Duration: 2:30 HRDocument3 pagesSchedule of Sharing Video Lectures On Teams App Classes - V A& B Duration: 2:30 HRNirmal KishorNo ratings yet
- Adarsh Public SchoolDocument1 pageAdarsh Public SchoolNirmal KishorNo ratings yet
- Adarsh Public School: C-Block, Vikas PuriDocument2 pagesAdarsh Public School: C-Block, Vikas PuriNirmal KishorNo ratings yet
- Adarsh Public School: C-Block, Vikas PuriDocument1 pageAdarsh Public School: C-Block, Vikas PuriNirmal KishorNo ratings yet
- Chapter 3 CheckpointDocument3 pagesChapter 3 CheckpointNirmal KishorNo ratings yet
- Share Copy of LESSON 1Document8 pagesShare Copy of LESSON 1Nirmal KishorNo ratings yet
- Adarsh Public School: C-Block, Vikas PuriDocument2 pagesAdarsh Public School: C-Block, Vikas PuriNirmal KishorNo ratings yet
- Fuel ConsumptionDocument4 pagesFuel ConsumptionNirmal KishorNo ratings yet
- Mathematics Revision Chapter 1 and 2 (Ex 2.1 Only)Document3 pagesMathematics Revision Chapter 1 and 2 (Ex 2.1 Only)Nirmal KishorNo ratings yet
- Uhpc Shotcrete Tunnel PDFDocument99 pagesUhpc Shotcrete Tunnel PDFNgayxuan Nguyen100% (1)
- No PicDocument36 pagesNo Picapi-3837830No ratings yet
- Cpq07-Civil-Issue For Construction-119Document1 pageCpq07-Civil-Issue For Construction-119Gerson FrançosoNo ratings yet
- Aerodynamics, Aeronautics and Flight MechanicsDocument5 pagesAerodynamics, Aeronautics and Flight MechanicsAravindNo ratings yet
- Machine Tool StructureDocument16 pagesMachine Tool StructurelicaNo ratings yet
- Fatigue Behaviour of Thin Walled Cold Formed Steel ProfilesDocument11 pagesFatigue Behaviour of Thin Walled Cold Formed Steel ProfilesFarhan DanishNo ratings yet
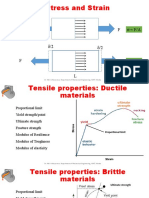
- Stress and Strain: σ = F/A F FDocument11 pagesStress and Strain: σ = F/A F FMd Arifuzzaman ArifNo ratings yet
- Spitzglass EquationDocument8 pagesSpitzglass EquationCHANADASNo ratings yet
- BS6297 1983 Code of Practice For Design and Installation of Small Sewage Treatment Works and CesspoolsDocument50 pagesBS6297 1983 Code of Practice For Design and Installation of Small Sewage Treatment Works and CesspoolsVodanh Tieutot100% (4)
- Republic of The Philippines: Battery - 1Document8 pagesRepublic of The Philippines: Battery - 1Aileen AntipoloNo ratings yet
- Microsoft Word - Annex L Tower Crane Footing Structural Design For TC 1, 3, 4 & 5Document14 pagesMicrosoft Word - Annex L Tower Crane Footing Structural Design For TC 1, 3, 4 & 5Revathy RanjithNo ratings yet
- Tool and Manufacturing Engineers Handbook FormingDocument948 pagesTool and Manufacturing Engineers Handbook Formingvpsimbu86100% (10)
- #5.COVID19 BSS555 Assignment 2 (Group) TemplateDocument54 pages#5.COVID19 BSS555 Assignment 2 (Group) TemplateanasNo ratings yet
- Ground Improvement by GroutingDocument17 pagesGround Improvement by GroutingVaibhav AryaNo ratings yet
- MCS502 Pre-recordedLecture Topic12 v1.1Document128 pagesMCS502 Pre-recordedLecture Topic12 v1.1Salman RiazNo ratings yet
- Stone Masonry: - Ashlar Masonry - Rubble MasonryDocument23 pagesStone Masonry: - Ashlar Masonry - Rubble MasonryYogendra PatilNo ratings yet
- Plumbing Presentation SlideDocument76 pagesPlumbing Presentation SlideSopheareak ChhanNo ratings yet
- Chapter 1-stdDocument72 pagesChapter 1-stdBelkacem AchourNo ratings yet
- Astm D6528-07-2016Document9 pagesAstm D6528-07-2016Ahmed AlwahshNo ratings yet
- Lecture 7 FEM Sheet-Pile Wall AnalysisDocument30 pagesLecture 7 FEM Sheet-Pile Wall AnalysisAbel MekbibNo ratings yet
- Failure Behaviour and Repair of Delaminated Glulam BeamsDocument15 pagesFailure Behaviour and Repair of Delaminated Glulam BeamsMatheus FlorianiNo ratings yet
- Analysis and Design of (G+100) Storied Building by Using SoftwareDocument3 pagesAnalysis and Design of (G+100) Storied Building by Using SoftwareInternational Journal of Innovations in Engineering and ScienceNo ratings yet
- EWC 333 Problem and SolutionDocument4 pagesEWC 333 Problem and SolutionAzgar AliNo ratings yet
- Experiment No. 9:: Compressive Strength of Cylindrical Concrete SpecimenDocument5 pagesExperiment No. 9:: Compressive Strength of Cylindrical Concrete SpecimencarloNo ratings yet
- Building in Beijing - Poly PlazaDocument5 pagesBuilding in Beijing - Poly PlazaPaulNo ratings yet
- T-Beam DesignDocument35 pagesT-Beam DesignAmal PremachandranNo ratings yet
- History of Civil EngineeringDocument6 pagesHistory of Civil EngineeringAraag100% (1)
- Sec07 - RacewaysDocument10 pagesSec07 - RacewaysYusufNo ratings yet
- Excelp Payment Certificate, BoQ, TakeoffDocument889 pagesExcelp Payment Certificate, BoQ, Takeoffmearig kahsay100% (1)
- Optimisation - of - Water Treatment SystemDocument49 pagesOptimisation - of - Water Treatment SystemChijioke ObiNo ratings yet