You might also like
- A Protection Method For Inverter-Based Microgrid Using Current-Only Polarity ComparisonDocument8 pagesA Protection Method For Inverter-Based Microgrid Using Current-Only Polarity ComparisonShreeji ExportsNo ratings yet
- 10 1109@jestpe 2019 2962245Document12 pages10 1109@jestpe 2019 2962245amina bu bakerNo ratings yet
- Mpce Feb 2023 SaDocument11 pagesMpce Feb 2023 SaDr O H GuptaNo ratings yet
- Fault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsDocument13 pagesFault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsIEEE PROJECTS MICANS INFOTECHNo ratings yet
- Intelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsDocument11 pagesIntelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsKarthikkeyan SNo ratings yet
- Non Pilot SchemeDocument10 pagesNon Pilot SchemeGate PrepNo ratings yet
- Distributed Generation On Low Voltage Distribution Network ProtectionDocument6 pagesDistributed Generation On Low Voltage Distribution Network Protectionvamsi naidaniNo ratings yet
- A New Directional Element Formicrogrid Protection PDFDocument15 pagesA New Directional Element Formicrogrid Protection PDFSourav DeNo ratings yet
- protection_BESSDocument8 pagesprotection_BESSPratikKumarNo ratings yet
- Protection of Microgrid Through Coordinated Directional Over-Current RelaysDocument6 pagesProtection of Microgrid Through Coordinated Directional Over-Current RelaysChristos ApostolopoulosNo ratings yet
- Modelling and Simulation of Reverse Power Relay For Loss of Mains Protection of Distributed Generation in MicrogridsDocument5 pagesModelling and Simulation of Reverse Power Relay For Loss of Mains Protection of Distributed Generation in MicrogridsthavaselvanNo ratings yet
- 11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsDocument13 pages11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsAdam AlivinoNo ratings yet
- PESGM2022-003489Document5 pagesPESGM2022-003489PratikKumarNo ratings yet
- ZERO CrossingDocument6 pagesZERO CrossingjoseNo ratings yet
- Protection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridDocument8 pagesProtection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridM8ow6fNo ratings yet
- Adaptive Protection Scheme For Smart GridsDocument6 pagesAdaptive Protection Scheme For Smart GridsMiguel QuispeNo ratings yet
- Novel Protection Schema For A Radial Microgrid SystemDocument6 pagesNovel Protection Schema For A Radial Microgrid SystempouyanNo ratings yet
- BaseDocument12 pagesBaseBhargavi KmNo ratings yet
- Asian Engineering ReviewDocument12 pagesAsian Engineering ReviewbensumbbNo ratings yet
- Electrical Power and Energy Systems: SciencedirectDocument10 pagesElectrical Power and Energy Systems: Sciencedirectali esmaeelniaNo ratings yet
- Adaptive Protection NotesDocument8 pagesAdaptive Protection NotesSisithaNo ratings yet
- Microgrids Formed by Renewable Energy Integration Into Power Grids Pose Electrical Protection ChallengesDocument26 pagesMicrogrids Formed by Renewable Energy Integration Into Power Grids Pose Electrical Protection ChallengesArjun ChatterjeeNo ratings yet
- Optimizing Supercapacitor Size and Cost for Resilient Adaptive Protection in MicrogridsDocument11 pagesOptimizing Supercapacitor Size and Cost for Resilient Adaptive Protection in MicrogridspouyanNo ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution NetworksAli Ahmed Ali AhmedNo ratings yet
- Protection of Distribution Systems With Significant Penetration of Distributed GenerationDocument6 pagesProtection of Distribution Systems With Significant Penetration of Distributed GenerationPandoraSkyNo ratings yet
- IEIB-D-22-00311Document9 pagesIEIB-D-22-00311saurabhguptasgsits123No ratings yet
- Energies: Real Fault Location in A Distribution Network Using Smart Feeder Meter DataDocument16 pagesEnergies: Real Fault Location in A Distribution Network Using Smart Feeder Meter DataDa DebebeNo ratings yet
- Jphotov 2017 2770159Document9 pagesJphotov 2017 2770159Novizon YusufNo ratings yet
- Anti-Islanding Protection of Distributed Generation Resources Using Negative Sequence Component of Voltage - 04380097Document4 pagesAnti-Islanding Protection of Distributed Generation Resources Using Negative Sequence Component of Voltage - 04380097Marcos Rosa dos SantosNo ratings yet
- Investigation Into The Implementation of Auto Reclosing Scheme in Distribution Networks With High Penetration of DgsDocument5 pagesInvestigation Into The Implementation of Auto Reclosing Scheme in Distribution Networks With High Penetration of DgsAnonymous zzMfpoBxNo ratings yet
- 10 1109@TPWRD 2020 3006791Document11 pages10 1109@TPWRD 2020 3006791amina bu bakerNo ratings yet
- Electronics 09 01959 v2Document14 pagesElectronics 09 01959 v2Reda DjatouNo ratings yet
- Protection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryDocument6 pagesProtection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryMashood NasirNo ratings yet
- Research Proposal ReportDocument23 pagesResearch Proposal ReportPravallika DarlaNo ratings yet
- hooshyar2015Document12 pageshooshyar2015mohammadNo ratings yet
- Various Algorithms To Detect Faults On Underground Cables Based On Impedance MethodDocument6 pagesVarious Algorithms To Detect Faults On Underground Cables Based On Impedance MethodRahat Ali KhanNo ratings yet
- Various Algorithms To Detect Faults On Underground Cables Based On Impedance MethodDocument6 pagesVarious Algorithms To Detect Faults On Underground Cables Based On Impedance MethodRahat Ali KhanNo ratings yet
- WK PDFDocument6 pagesWK PDFRahat Ali KhanNo ratings yet
- Various Algorithms To Detect Faults On Underground Cables Based On Impedance MethodDocument6 pagesVarious Algorithms To Detect Faults On Underground Cables Based On Impedance MethodRahat Ali KhanNo ratings yet
- Electric Power Systems Research: G. Marchesan, M.R. Muraro, G. Cardoso JR, L. Mariotto, C.D.L. Da SilvaDocument8 pagesElectric Power Systems Research: G. Marchesan, M.R. Muraro, G. Cardoso JR, L. Mariotto, C.D.L. Da SilvaYa RabNo ratings yet
- 1 s2.0 S2666285X22000292 MainDocument10 pages1 s2.0 S2666285X22000292 Mainenta elektroNo ratings yet
- A Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeansDocument13 pagesA Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeanspouyanNo ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A low voltage microgrid protection scheme using digital instrument transformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A low voltage microgrid protection scheme using digital instrument transformerskhitech2002No ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution Networksjijo123408No ratings yet
- Aalborg Universitet: Lin, Hengwei Liu, Chengxi Guerrero, Josep M. Quintero, Juan Carlos VasquezDocument7 pagesAalborg Universitet: Lin, Hengwei Liu, Chengxi Guerrero, Josep M. Quintero, Juan Carlos VasquezpouyanNo ratings yet
- Transmission Line Fault Detection Methods AnalysisDocument28 pagesTransmission Line Fault Detection Methods AnalysisAvinash ChimkarNo ratings yet
- Micro-Grid Autonomous Operation During and Subs To Islanding ProcessDocument10 pagesMicro-Grid Autonomous Operation During and Subs To Islanding Processapi-3738286No ratings yet
- Hierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC MicrogridsDocument13 pagesHierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC Microgridsnaga_rajNo ratings yet
- 2019 Distance Protection Performance in AC Power System With Back-to-Back Converter InterfaceDocument6 pages2019 Distance Protection Performance in AC Power System With Back-to-Back Converter InterfaceAbhishekAnandNo ratings yet
- A Hierarchical Multiagent-Based Protection Structure For Meshed MicrogridsDocument8 pagesA Hierarchical Multiagent-Based Protection Structure For Meshed MicrogridsRogerthat66 RogerNo ratings yet
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- Protective relays guide for power system faultsDocument5 pagesProtective relays guide for power system faultssolo66No ratings yet
- 1 s2.0 S0142061522002502 Main2Document12 pages1 s2.0 S0142061522002502 Main2Sandeep BiswalNo ratings yet
- Energies 09 00459 PDFDocument16 pagesEnergies 09 00459 PDFYin Yin AungNo ratings yet
- Source-Agnostic Time-Domain Distance RelayDocument10 pagesSource-Agnostic Time-Domain Distance Relaycalon presidenNo ratings yet
- Energies 14 02477 v2Document29 pagesEnergies 14 02477 v2Hasmat MalikNo ratings yet
- A Comprehensive Digital Protection Scheme For Low-Voltage Microgrids With Inverter-Based and Conventional Distributed GenerationsDocument12 pagesA Comprehensive Digital Protection Scheme For Low-Voltage Microgrids With Inverter-Based and Conventional Distributed Generationssuzuki.wagnor234No ratings yet
- SSR Relay ProtectionDocument11 pagesSSR Relay ProtectionSrinivasan SriniNo ratings yet
- Ijertv13n11 99Document7 pagesIjertv13n11 99Nandi ?No ratings yet
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkFrom EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkNo ratings yet
- Control of Parallel Inverter-Interf PDFDocument5 pagesControl of Parallel Inverter-Interf PDFSaraMuzaffarNo ratings yet
- 1.A Fault Analysis Method For Microgrids Consisting of InverterDocument5 pages1.A Fault Analysis Method For Microgrids Consisting of InverterSaraMuzaffarNo ratings yet
- Single Phase Earth-Faults Solutions Using Reclosers To Meet The Demands of The Modern NetworkDocument7 pagesSingle Phase Earth-Faults Solutions Using Reclosers To Meet The Demands of The Modern NetworkSaraMuzaffarNo ratings yet
- Multi Agent System Based Fault Location and Isolation in A Smart Microgrid SystemDocument4 pagesMulti Agent System Based Fault Location and Isolation in A Smart Microgrid SystemSaraMuzaffarNo ratings yet
- Drawing PDFDocument1 pageDrawing PDFSaraMuzaffarNo ratings yet
- Optimal Placement of Multi Dgs in Distribution System With Considering The DG Bus Available LimitsDocument7 pagesOptimal Placement of Multi Dgs in Distribution System With Considering The DG Bus Available LimitsSaraMuzaffarNo ratings yet
- A Vanadium Redox BatteryDocument9 pagesA Vanadium Redox BatterySaraMuzaffarNo ratings yet
- Energies: An Approach To Determine The Weibull Parameters For Wind Energy Analysis: The Case of Galicia (Spain)Document25 pagesEnergies: An Approach To Determine The Weibull Parameters For Wind Energy Analysis: The Case of Galicia (Spain)kalokosNo ratings yet
- PHD Research Proposal (Electrical Power & Energy Engineering) PDFDocument13 pagesPHD Research Proposal (Electrical Power & Energy Engineering) PDFSaraMuzaffar33% (3)
- 1.optimal Design of Solar PV FormsDocument8 pages1.optimal Design of Solar PV FormsSaraMuzaffarNo ratings yet
- Weibill Method For WindDocument6 pagesWeibill Method For WindSaraMuzaffarNo ratings yet
- 3.optimal Location and Sizing of Solar FarmDocument6 pages3.optimal Location and Sizing of Solar FarmSaraMuzaffarNo ratings yet
- HV Chap2Document12 pagesHV Chap2SachithHiroshanaWijethungaNo ratings yet
- 1.optimal Design of Solar PV FormsDocument8 pages1.optimal Design of Solar PV FormsSaraMuzaffarNo ratings yet
- MS-993 Sara Ashfaq - Proof OK - 5-3-15Document7 pagesMS-993 Sara Ashfaq - Proof OK - 5-3-15SaraMuzaffarNo ratings yet
- HV Chap2Document12 pagesHV Chap2SachithHiroshanaWijethungaNo ratings yet
- Breakdown of Gaseous Insulation ExplainedDocument21 pagesBreakdown of Gaseous Insulation Explainedsdsamarakkody0% (1)
- LV Release Coordination - by Power ProjectsDocument17 pagesLV Release Coordination - by Power Projectsarun kumarNo ratings yet
- RBK-1 Details For Relay SettingDocument3 pagesRBK-1 Details For Relay SettingWinny MathewNo ratings yet
- Tosiba GRD140Document438 pagesTosiba GRD140Lâm VũNo ratings yet
- Yaskawa A1000Document354 pagesYaskawa A1000NICOELECTRONICO100% (1)
- Wind Power System PMSGDocument7 pagesWind Power System PMSGCyber Gamer El MuroNo ratings yet
- Eocr Total enDocument38 pagesEocr Total enArturo SanchezNo ratings yet
- 12.1. Electrical Safety ProgramDocument9 pages12.1. Electrical Safety ProgramMehmood Khan MarwatNo ratings yet
- ERACS Analysis of Power System ComponentsDocument16 pagesERACS Analysis of Power System ComponentsAnwar SalimNo ratings yet
- Power Systems and Simulation Laboratory: Department of Electrical and Electronics EngineeringDocument48 pagesPower Systems and Simulation Laboratory: Department of Electrical and Electronics EngineeringkudupudinageshNo ratings yet
- Secondary Arcs & NGRDocument6 pagesSecondary Arcs & NGRSaadAbdulBasitNo ratings yet
- Electrical System Earthing Design Philosophy: Prelude Floating LNG PROJECTDocument28 pagesElectrical System Earthing Design Philosophy: Prelude Floating LNG PROJECTStefano FavaroNo ratings yet
- User's manual for SPAJ 144 C combined overcurrent and earth-fault relayDocument24 pagesUser's manual for SPAJ 144 C combined overcurrent and earth-fault relayDiseño y Gestión de ProyectosNo ratings yet
- Calculation For The Value of Stabilizing Resistor REF SettingDocument17 pagesCalculation For The Value of Stabilizing Resistor REF Setting1453hNo ratings yet
- Pd6700 Vantageview Loop-Powered Process Meter: Precision Digital CorporationDocument40 pagesPd6700 Vantageview Loop-Powered Process Meter: Precision Digital CorporationWilmer Andres Sanchez RinconNo ratings yet
- Voltage Dips/sags, Swells and InterruptionsDocument16 pagesVoltage Dips/sags, Swells and Interruptionssandeep kumar mishraNo ratings yet
- Brake Tool ManualDocument50 pagesBrake Tool ManualKevin SinghNo ratings yet
- Types of Neutral Earthing in Power Distribution Part 1Document4 pagesTypes of Neutral Earthing in Power Distribution Part 1shoham985No ratings yet
- Scania VCI2-Manual De-Usuario DIAGNOSISDocument58 pagesScania VCI2-Manual De-Usuario DIAGNOSISnetogtba100% (9)
- CESTest CertificateDocument1 pageCESTest CertificateAslan MinaNo ratings yet
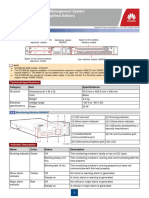
- SCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Document9 pagesSCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Hamza OsamaNo ratings yet
- Arc Resistant EquipmentDocument9 pagesArc Resistant EquipmentDiego Guerrero DiazNo ratings yet
- Load Flow Analysis and Short CircuitDocument16 pagesLoad Flow Analysis and Short CircuitAkram HossenNo ratings yet
- Understanding ElectricityDocument201 pagesUnderstanding ElectricityThan ZawNo ratings yet
- Model: K3063i: Specialize in Electric Power TestingDocument3 pagesModel: K3063i: Specialize in Electric Power Testingrey chicoNo ratings yet
- Assignment - 1 - Basic of ProtectionDocument2 pagesAssignment - 1 - Basic of ProtectionVaibhav ThombareNo ratings yet
- MB 103Document22 pagesMB 103SAEID MUSTAFANo ratings yet
- Protection CoordinationDocument31 pagesProtection CoordinationJerome Eugene100% (1)
- IEEE STD C62.92.2-1989Document25 pagesIEEE STD C62.92.2-1989abdou samiNo ratings yet
- Chapter (1-5) ExDocument38 pagesChapter (1-5) ExRichard Simon KisituNo ratings yet
- TCL Service Manual EngDocument45 pagesTCL Service Manual EngK J LEENo ratings yet