You might also like
- Load Flow StudiesDocument30 pagesLoad Flow StudiesMary Morse100% (2)
- H1P1 - Resistor Combinations - Homework 1 - Material Del Curso 6Document5 pagesH1P1 - Resistor Combinations - Homework 1 - Material Del Curso 6Eduardo Calle100% (1)
- Series and Parallel DC CircuitsDocument8 pagesSeries and Parallel DC CircuitsFrobles120% (1)
- HARMONIC MITIGATION TECHNIQUESDocument4 pagesHARMONIC MITIGATION TECHNIQUESKumar OzilNo ratings yet
- Experimentno 150816101650 Lva1 App6891Document4 pagesExperimentno 150816101650 Lva1 App6891Reddyvari VenugopalNo ratings yet
- Applications of Systems of Linear EquationsDocument44 pagesApplications of Systems of Linear EquationsGovind Manglani80% (5)
- Salam 2018Document466 pagesSalam 2018Luis Alvaro Montoya Santiyanes100% (1)
- Electric Circuits 10th Edition Nilsson Solutions ManualDocument89 pagesElectric Circuits 10th Edition Nilsson Solutions ManualKimCoffeyjndf100% (41)
- Physics Project File 2222333333Document12 pagesPhysics Project File 2222333333Harsh Arora100% (1)
- Non Optimum Compensation Schemes For Single Pole Reclosing On EHV Double Circuit TLDocument9 pagesNon Optimum Compensation Schemes For Single Pole Reclosing On EHV Double Circuit TLCarlos Lino Rojas AgüeroNo ratings yet
- A History of Microwave Filter Research, Design, and DevelopmentDocument15 pagesA History of Microwave Filter Research, Design, and Developmentsanjeevsoni64No ratings yet
- The Use of Reactor SwitchesDocument11 pagesThe Use of Reactor SwitchesJosue MontañoNo ratings yet
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayNo ratings yet
- New Model For Transformer Saturation Characteristics by Including HysteresisDocument7 pagesNew Model For Transformer Saturation Characteristics by Including HysteresisNohelia CruzNo ratings yet
- Pulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyDocument18 pagesPulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyRangesh Babu100% (1)
- Modelling the Resonant Behaviour of an RLC Circuit (4)Document4 pagesModelling the Resonant Behaviour of an RLC Circuit (4)youssof.131006No ratings yet
- B. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsDocument8 pagesB. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsFelix GamarraNo ratings yet
- DETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSDocument9 pagesDETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSSherif HelmyNo ratings yet
- Adaptive MPC Current Control-1Document15 pagesAdaptive MPC Current Control-1sainadh saiNo ratings yet
- Load Commutation Starts Synchronous MachineDocument7 pagesLoad Commutation Starts Synchronous MachinePaulo Sérgio RodriguesNo ratings yet
- Torsional PssDocument6 pagesTorsional PssPablo RubenNo ratings yet
- Fault Detection Identification and Accommodation For An Electrohydraulic System An Adaptive Robust ApproachDocument6 pagesFault Detection Identification and Accommodation For An Electrohydraulic System An Adaptive Robust ApproachJoseph JoseNo ratings yet
- A Project Report On "Modelling of Fact Device For Power Flow Analysis"Document45 pagesA Project Report On "Modelling of Fact Device For Power Flow Analysis"gopalchandramahatoNo ratings yet
- Lizer (31, Signal (4) .: Au (S) Apes (S)Document7 pagesLizer (31, Signal (4) .: Au (S) Apes (S)Rajesh GangwarNo ratings yet
- Fast Decoupled Power Flow Unbalanced Radial Distribution SystemsDocument8 pagesFast Decoupled Power Flow Unbalanced Radial Distribution SystemsAbdulrahmanNo ratings yet
- A Simple Approach To Estimate The Steady-State Performance of Self-Excited Induction GeneratorDocument11 pagesA Simple Approach To Estimate The Steady-State Performance of Self-Excited Induction GeneratorAnkita AroraNo ratings yet
- Qiang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012148Document8 pagesQiang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012148DRIS IDRISNo ratings yet
- Multi-phase Transmission PerformanceDocument10 pagesMulti-phase Transmission PerformanceAbhinav JainNo ratings yet
- 53 Design and Simulation of UPQC To Improve Power Quality and Transfer Power ofDocument12 pages53 Design and Simulation of UPQC To Improve Power Quality and Transfer Power ofdaspop83No ratings yet
- Optimal Capacitor Placement Voltage Stability and System SecurityDocument7 pagesOptimal Capacitor Placement Voltage Stability and System SecurityTareq AzizNo ratings yet
- ACS132-1321 - RCL Dynamics - Diamond Template - 1718Document23 pagesACS132-1321 - RCL Dynamics - Diamond Template - 1718carloviggiano4_26961No ratings yet
- Effects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksDocument4 pagesEffects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksbogdanNo ratings yet
- Backstepping Controller Design To Track Maximum Power in Photovoltaic SystemsDocument10 pagesBackstepping Controller Design To Track Maximum Power in Photovoltaic SystemsalgNo ratings yet
- Vector Control of Cage Induction Motors A Physical Insight, 1996 PDFDocument10 pagesVector Control of Cage Induction Motors A Physical Insight, 1996 PDFAli H. NumanNo ratings yet
- DC Symmetrical Component Method For Analysis and Control of Bipolar LVDC GridDocument6 pagesDC Symmetrical Component Method For Analysis and Control of Bipolar LVDC GridmedbNo ratings yet
- Assessing Power System Stabilizer Robustness Using a Synthetic Test SystemDocument7 pagesAssessing Power System Stabilizer Robustness Using a Synthetic Test SystemDaniel ManjarresNo ratings yet
- 1, March 47: of ForDocument8 pages1, March 47: of Forcarlos gomez reyesNo ratings yet
- Comparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelDocument6 pagesComparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelBalajiNo ratings yet
- Single Phase Switching Parameters For Untransposed EHV TLDocument12 pagesSingle Phase Switching Parameters For Untransposed EHV TLCarlos Lino Rojas AgüeroNo ratings yet
- Design of Parallel TSC For Reactive Power Compensation in Electric Arc FurnacesDocument5 pagesDesign of Parallel TSC For Reactive Power Compensation in Electric Arc FurnacesGilmar FerrettiNo ratings yet
- SMiRT 25 Paper Dynamic Model - DubykDocument10 pagesSMiRT 25 Paper Dynamic Model - DubykTopNameNo ratings yet
- Annamalai PaperDocument9 pagesAnnamalai PaperPrabu BaskaranNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- Radio Telescope Antenna Azimuth Position 3Document13 pagesRadio Telescope Antenna Azimuth Position 3Nadzmi MizoNo ratings yet
- A Comparative Assessment of Power Swing Detection TechniquesDocument4 pagesA Comparative Assessment of Power Swing Detection TechniquesAshley SureshNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Scale-Up Method For A RCE Bench Scale Electrochemical ReactorDocument9 pagesScale-Up Method For A RCE Bench Scale Electrochemical ReactorJaqueline Gonzalez TrujilloNo ratings yet
- Ghani - 1 s2.0 S0038092X1100243X MainDocument9 pagesGhani - 1 s2.0 S0038092X1100243X MainosmanalNo ratings yet
- Modeling and Dynamic Characterisation of Peak Current Mode Controlled Super BoostDocument10 pagesModeling and Dynamic Characterisation of Peak Current Mode Controlled Super Boostsang young soNo ratings yet
- Power SystemDocument7 pagesPower Systemleemoh8190No ratings yet
- 3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementDocument9 pages3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementRogger MezaNo ratings yet
- A Rprop-Neural-Network-Based PV Maximum Power Point Tracking Algorithm With Short-Circuit Current LimitationDocument5 pagesA Rprop-Neural-Network-Based PV Maximum Power Point Tracking Algorithm With Short-Circuit Current LimitationRajo PATRICK alisonNo ratings yet
- An Advanced Particle Swarm Optimization Algorithm For Mppts in PV SystemsDocument7 pagesAn Advanced Particle Swarm Optimization Algorithm For Mppts in PV Systemsayoub reseauNo ratings yet
- G. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCDocument6 pagesG. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCFelix GamarraNo ratings yet
- RBF BP JieeecDocument5 pagesRBF BP JieeecEyad A. FeilatNo ratings yet
- Inverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahDocument11 pagesInverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahPrajakta dahakeNo ratings yet
- AmanDocument26 pagesAmanAkhilesh BarnwalNo ratings yet
- WIEN 2k PDFDocument6 pagesWIEN 2k PDFpiposatNo ratings yet
- Subsynchronous reactanceSSRDocument25 pagesSubsynchronous reactanceSSRmohancrescentNo ratings yet
- A Quantum Carnot Engine in Three-Dimensions: Adv. Studies Theor. Phys., Vol. 8, 2014, No. 14, 627 - 633Document7 pagesA Quantum Carnot Engine in Three-Dimensions: Adv. Studies Theor. Phys., Vol. 8, 2014, No. 14, 627 - 633Kin MattNo ratings yet
- Lab 6Document8 pagesLab 6ivan_jeba7626No ratings yet
- 2.maths - Ijms - Nonlinear - Sundaram RDocument8 pages2.maths - Ijms - Nonlinear - Sundaram Riaset123No ratings yet
- 712 RamosDocument6 pages712 RamosAbdoo SalemNo ratings yet
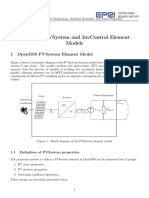
- Opendss Pvsystem and Invcontrol Element ModelsDocument30 pagesOpendss Pvsystem and Invcontrol Element ModelsTerrorTricolorFCNo ratings yet
- Three-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsDocument5 pagesThree-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsFerry OpilOpNo ratings yet
- Letter: Resolving The Energy Levels of A Nanomechanical OscillatorDocument11 pagesLetter: Resolving The Energy Levels of A Nanomechanical OscillatorFausto CésarNo ratings yet
- 5 106-6 PDFDocument6 pages5 106-6 PDFCeh DjamelNo ratings yet
- Current Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmDocument7 pagesCurrent Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmAnonymous afzpkOo3No ratings yet
- Computational NeuroendocrinologyFrom EverandComputational NeuroendocrinologyDuncan J. MacGregorNo ratings yet
- MpowerDocument31 pagesMpowerAbinav AggarwalNo ratings yet
- B.Tech B.Pharm I Mid Exams Posponed CircularDocument1 pageB.Tech B.Pharm I Mid Exams Posponed CircularAkhil TupiliNo ratings yet
- Miller IndicesDocument19 pagesMiller IndicesNizar Achmad NizarNo ratings yet
- Android, iOS university exam papers site updatesDocument1 pageAndroid, iOS university exam papers site updatesAkhil TupiliNo ratings yet
- Annexure-I: Schedule of Village/Ward Secretariat Staff Recruitment Examination-2020Document1 pageAnnexure-I: Schedule of Village/Ward Secretariat Staff Recruitment Examination-2020Mohammed Javeed ahmedNo ratings yet
- Government of Andhra Pradesh, Grama/Ward Sachivalayam Recruitment-2020 Hall TicketDocument3 pagesGovernment of Andhra Pradesh, Grama/Ward Sachivalayam Recruitment-2020 Hall TicketAkhil TupiliNo ratings yet
- SSC Junior Engineer Exam 2020 Application AcceptedDocument2 pagesSSC Junior Engineer Exam 2020 Application AcceptedAkhil TupiliNo ratings yet
- 15 ReferencesDocument17 pages15 ReferencesPrashant RajakNo ratings yet
- 3) SVC & Statcom PDFDocument5 pages3) SVC & Statcom PDFAkhil TupiliNo ratings yet
- B.Teh IV II Adv. Supple Exams NotificationDocument1 pageB.Teh IV II Adv. Supple Exams NotificationAkhil TupiliNo ratings yet
- 15 ReferencesDocument17 pages15 ReferencesPrashant RajakNo ratings yet
- pdf29 PDFDocument3 pagespdf29 PDFAkhil TupiliNo ratings yet
- CamScanner Scans PDFs from PhotosDocument5 pagesCamScanner Scans PDFs from PhotosAkhil TupiliNo ratings yet
- B.Tech II II III II R15 Exams NotificationDocument1 pageB.Tech II II III II R15 Exams NotificationAkhil TupiliNo ratings yet
- Discrete-Time LQR Finite HorizonDocument19 pagesDiscrete-Time LQR Finite HorizonAkhil TupiliNo ratings yet
- InvoiceDocument1 pageInvoiceAkhil TupiliNo ratings yet
- IDC Chap 3 Conrol of DC Drives PDFDocument26 pagesIDC Chap 3 Conrol of DC Drives PDFAkhil TupiliNo ratings yet
- PED Syllabus 2014Document32 pagesPED Syllabus 2014Konda GopalNo ratings yet
- M.Tech PE, Courses R17 Course Structure & Syllabus PDFDocument50 pagesM.Tech PE, Courses R17 Course Structure & Syllabus PDFmanoharNo ratings yet
- Lecture 7: Control of a DC Motor DriveDocument25 pagesLecture 7: Control of a DC Motor DrivePoliConDrive0% (1)
- Closed Loop Control of DC Motor Using Firing AngleDocument7 pagesClosed Loop Control of DC Motor Using Firing AngleIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Real-time MPC Speed Control on 16-bit MicrocontrollerDocument21 pagesReal-time MPC Speed Control on 16-bit MicrocontrollerShubham JagtapNo ratings yet
- PED Syllabus 2014Document32 pagesPED Syllabus 2014Konda GopalNo ratings yet
- Theft Detection Based GSM Prepaid Electricity System Project ReportDocument21 pagesTheft Detection Based GSM Prepaid Electricity System Project ReportAkhil TupiliNo ratings yet
- EEEF EPE DT M.TechDocument59 pagesEEEF EPE DT M.TechAkhil TupiliNo ratings yet
- M.Tech PE, Courses R17 Course Structure & Syllabus PDFDocument50 pagesM.Tech PE, Courses R17 Course Structure & Syllabus PDFmanoharNo ratings yet
- Service Manual: Digital MultimeterDocument25 pagesService Manual: Digital Multimeterbudi0251No ratings yet
- Numerical Computing With Simulink Volume IDocument327 pagesNumerical Computing With Simulink Volume Igarridolopez100% (1)
- Central Battery System ZB-S: © 2014 Eaton, All Rights ReservedDocument41 pagesCentral Battery System ZB-S: © 2014 Eaton, All Rights ReservedEmmanuel ToretaNo ratings yet
- La 42032Document7 pagesLa 42032serkalemtayeNo ratings yet
- BJT Equivalent Circuit ModelsDocument6 pagesBJT Equivalent Circuit Modelspkadu1985No ratings yet
- ECEN 214 - Electrical Circuit Theory Fall 2017: Smiller@tamu - EduDocument4 pagesECEN 214 - Electrical Circuit Theory Fall 2017: Smiller@tamu - EduAllie JuneNo ratings yet
- Electric Circuits 9TH 106Document5 pagesElectric Circuits 9TH 106Richard DapitoNo ratings yet
- máy cắt sf6 abbDocument7 pagesmáy cắt sf6 abbQuảng Thành NamNo ratings yet
- Experiment#6 DC Circuit Analysis: Electrical Circuits Lab 0905212Document12 pagesExperiment#6 DC Circuit Analysis: Electrical Circuits Lab 0905212aliyahNo ratings yet
- 04 Basic Electrical, Electronics and Measurement EngineeringDocument82 pages04 Basic Electrical, Electronics and Measurement EngineeringkrishnandrkNo ratings yet
- Easypact EZC400H circuit breaker specsDocument2 pagesEasypact EZC400H circuit breaker specsahmedalgaloNo ratings yet
- The Variable Resistor Has Been AdjustedDocument3 pagesThe Variable Resistor Has Been AdjustedPank O RamaNo ratings yet
- 6055-31 VR Breaker 1200-2000A - May 2008 PDFDocument42 pages6055-31 VR Breaker 1200-2000A - May 2008 PDFRahil TasawarNo ratings yet
- GSM HarvesterDocument17 pagesGSM HarvesterSarah HeadNo ratings yet
- Impulse Generator BasicsDocument59 pagesImpulse Generator BasicsSharif UllahNo ratings yet
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- 11 DP Physics - Topic 5 Electricity & Magnetism ProgramDocument12 pages11 DP Physics - Topic 5 Electricity & Magnetism ProgrampixelhoboNo ratings yet
- InstructionManual RectifierDocument14 pagesInstructionManual RectifierElectrifying GuyNo ratings yet
- Analysis and Design of Power Electronic Circuits Using OrcadDocument39 pagesAnalysis and Design of Power Electronic Circuits Using OrcadMari MuthuNo ratings yet
- Electrical Circuits Ii: DIRECTIONS: Solve For The Unknown Values For Each Problem, With Complete SolutionsDocument8 pagesElectrical Circuits Ii: DIRECTIONS: Solve For The Unknown Values For Each Problem, With Complete SolutionsJean Kimberly AgnoNo ratings yet
- Important Questions For CBSE Class 12 Physics Chapter 3Document62 pagesImportant Questions For CBSE Class 12 Physics Chapter 3sudhanshu narvekarNo ratings yet
- EmperorDocument12 pagesEmperorRafik HergéNo ratings yet