You might also like
- Inertia Blok PDFDocument14 pagesInertia Blok PDFmohdzamryNo ratings yet
- JKR 4.4 TABC - Air Cooled Package SystemDocument22 pagesJKR 4.4 TABC - Air Cooled Package SystemAniq AimanNo ratings yet
- Power Technologies ATS Low Voltage Transfer SwitchesDocument20 pagesPower Technologies ATS Low Voltage Transfer SwitchesGalih Aji100% (1)
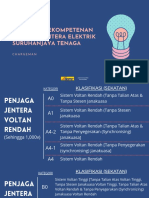
- EIU Sarawak Chargeman Competency CategoriesDocument9 pagesEIU Sarawak Chargeman Competency CategoriesAbun ParadoxsNo ratings yet
- Basic Circuit Theory, Charles A. Desoer, Ernest S. Kuh 1969 PDFDocument887 pagesBasic Circuit Theory, Charles A. Desoer, Ernest S. Kuh 1969 PDFMithun P S80% (10)
- VSSUT B.Tech. 8th Sem. Digital Signal Processing Repeat Mid Sem Exam May 2020Document1 pageVSSUT B.Tech. 8th Sem. Digital Signal Processing Repeat Mid Sem Exam May 2020Hemant ModiNo ratings yet
- ECE 431 DSP Homework 1 Signals and Systems ReviewDocument4 pagesECE 431 DSP Homework 1 Signals and Systems ReviewAmro FaisalNo ratings yet
- Form 4 Test Results SummaryDocument1 pageForm 4 Test Results SummaryKarim AmerNo ratings yet
- Swicom: Engineering ManualDocument40 pagesSwicom: Engineering ManualpeteatkoNo ratings yet
- 9200 Installation and Basic Setup ManualDocument60 pages9200 Installation and Basic Setup ManualTino RuizNo ratings yet
- Distribution Code For Peninsular Malaysia Sabah F.T. Labuan Amendments 2017 - V5Document173 pagesDistribution Code For Peninsular Malaysia Sabah F.T. Labuan Amendments 2017 - V5May OngNo ratings yet
- Raychem Screened, Separable Connection System RSTI-68 800 A Up To 42 KVDocument4 pagesRaychem Screened, Separable Connection System RSTI-68 800 A Up To 42 KVgiovany_vq91No ratings yet
- PART 3 - System Greater Than 72kWp and Up To 425kWpDocument26 pagesPART 3 - System Greater Than 72kWp and Up To 425kWpMohd Izham IdrisNo ratings yet
- LOGO8-KNX LogicFunction DOC enDocument18 pagesLOGO8-KNX LogicFunction DOC enJuan Pedro Sánchez Vidal100% (1)
- Modeling and Simulation of Solar PV and DFIG Based Wind Hybrid System - ScienceDirect PDFDocument9 pagesModeling and Simulation of Solar PV and DFIG Based Wind Hybrid System - ScienceDirect PDFEman FawzyNo ratings yet
- User Manual Fluxus f808Document122 pagesUser Manual Fluxus f808Pablo QuirogaNo ratings yet
- 11kV 3 Core PILC SWA BS6480 Cable SpecificationDocument3 pages11kV 3 Core PILC SWA BS6480 Cable SpecificationMuhammad TaufiqNo ratings yet
- Iomirror E3210 User'S Manual: Third Edition, May 2014Document42 pagesIomirror E3210 User'S Manual: Third Edition, May 2014booklover2No ratings yet
- Method Statement For Mackintosh Probe TestDocument1 pageMethod Statement For Mackintosh Probe TestNurLiyana RasmiNo ratings yet
- Everything about Transmission SystemsDocument7 pagesEverything about Transmission SystemsKanageshwari RathakrishnanNo ratings yet
- Large Scale Solar 4 - Potential SiteDocument37 pagesLarge Scale Solar 4 - Potential SiteAzree Mohd NoorNo ratings yet
- Efficient Outage Maintenance Practices (Eaton Electrical)Document7 pagesEfficient Outage Maintenance Practices (Eaton Electrical)des1982No ratings yet
- Entes CatalogueDocument154 pagesEntes CatalogueShvan NajeebNo ratings yet
- Earthing TheoryDocument3 pagesEarthing TheoryM.Venkata RameshNo ratings yet
- RT - SCADA - FY2019 - v5Document18 pagesRT - SCADA - FY2019 - v5Mas Ahmad Safwan Masbah100% (1)
- LS02Document33 pagesLS02nazmiNo ratings yet
- AnocalprDocument27 pagesAnocalprDiego Fernado AvendañoNo ratings yet
- Total Technical Specs PDFDocument259 pagesTotal Technical Specs PDFBhavesh KeraliaNo ratings yet
- FSV New VRF PanasonicDocument66 pagesFSV New VRF PanasonicAriefNo ratings yet
- AMSGB Power Transformer Brochure (Final 27.05.2010)Document4 pagesAMSGB Power Transformer Brochure (Final 27.05.2010)winston11No ratings yet
- Guideline On Indoor Air Quality Service For Hospital Support ServiceDocument53 pagesGuideline On Indoor Air Quality Service For Hospital Support ServiceLee Jing YangNo ratings yet
- Scheduling and Dispatch Codes: Sdc3: Frequency and Interconnector Transfer ControlDocument28 pagesScheduling and Dispatch Codes: Sdc3: Frequency and Interconnector Transfer ControlGopalakrishnan SekharanNo ratings yet
- Permit To Work Self Assesment ChecklistDocument3 pagesPermit To Work Self Assesment Checklistஹரிஹரசுதன்No ratings yet
- Testing Lightning Protection SystemsDocument2 pagesTesting Lightning Protection SystemskanthaNo ratings yet
- Road Blocker M30, M40, M50 AUIA 311-333 (E)Document33 pagesRoad Blocker M30, M40, M50 AUIA 311-333 (E)omar farukNo ratings yet
- FAT Procedures: 1-ObjectiveDocument6 pagesFAT Procedures: 1-ObjectiveMohammad YaseeenNo ratings yet
- Standard genset checklistDocument2 pagesStandard genset checklistHappy Prakoso adhiNo ratings yet
- ABB - MNS - Service Manual - EN - 1SXH900002M0208 - REV G 02-2023Document64 pagesABB - MNS - Service Manual - EN - 1SXH900002M0208 - REV G 02-2023Donald FotsoNo ratings yet
- Direct On Line Starter - Electrical Notes & ArticlesDocument13 pagesDirect On Line Starter - Electrical Notes & ArticlesRanaSinhaNo ratings yet
- Katalog Arakawa Solar Energy ExpertDocument31 pagesKatalog Arakawa Solar Energy ExpertDen Bagus100% (1)
- Roadmap for Advanced Distribution Management System (ADMSDocument3 pagesRoadmap for Advanced Distribution Management System (ADMSrasim_m1146No ratings yet
- CPL King Centre Stutong DecDocument1 pageCPL King Centre Stutong DecMadeline Chia100% (1)
- Overhead Crane Pre Shift InspectionDocument1 pageOverhead Crane Pre Shift InspectionRafflesia GroupNo ratings yet
- As 2353-1999 Pedestrian Push-Button AssembliesDocument7 pagesAs 2353-1999 Pedestrian Push-Button AssembliesSAI Global - APACNo ratings yet
- Solar PV Inverter Test ProceduresDocument62 pagesSolar PV Inverter Test ProceduresskylarksNo ratings yet
- Wiring and aircond installation price listDocument1 pageWiring and aircond installation price listizeannahNo ratings yet
- Elect DistributionDocument66 pagesElect DistributionmanojdaspallaNo ratings yet
- Analisis Perencanaan Pembagian Beban Dan Instalasi Listrik Pada Hotel Golden Tulip Di Kota PontianakDocument9 pagesAnalisis Perencanaan Pembagian Beban Dan Instalasi Listrik Pada Hotel Golden Tulip Di Kota PontianakWak TacuNo ratings yet
- TNB - SSP - UM - Self-Meter Reading (SMR) - How To Read Energy MetersDocument12 pagesTNB - SSP - UM - Self-Meter Reading (SMR) - How To Read Energy MetersLee Chee ChoyNo ratings yet
- MS For Insulation Resistance Test PDFDocument6 pagesMS For Insulation Resistance Test PDFMohamad NajibNo ratings yet
- Mikro - Voltage RelayDocument12 pagesMikro - Voltage Relaycharadeg100No ratings yet
- Distribution Commissioning Form 41 Earthing System Resistance Testing All Equipment 20190923 PDFDocument3 pagesDistribution Commissioning Form 41 Earthing System Resistance Testing All Equipment 20190923 PDFkiet eelNo ratings yet
- Feasibility Report for Solar PV Installation on Rooftop in Greater NoidaDocument6 pagesFeasibility Report for Solar PV Installation on Rooftop in Greater NoidaSlnko EnergyNo ratings yet
- MV and LV cable technical requirementsDocument5 pagesMV and LV cable technical requirementsFor AppsNo ratings yet
- Automatic Railway Gate ControllerDocument32 pagesAutomatic Railway Gate ControllerKaos Polos NakiraNo ratings yet
- Electrical Practices For Construction Work PDFDocument7 pagesElectrical Practices For Construction Work PDFTTaanNo ratings yet
- Frequency Inverter E2000+: (IP20) Safety Instructions Installation-And Operating ManualDocument74 pagesFrequency Inverter E2000+: (IP20) Safety Instructions Installation-And Operating Manualyunita umb2No ratings yet
- Permit To Work - Electrical ContractorDocument2 pagesPermit To Work - Electrical ContractorSamsudin Ahmad100% (1)
- Case Study MMDocument3 pagesCase Study MMayam0% (1)
- MRT2 ME Drawing7Document1 pageMRT2 ME Drawing7qinxuekunNo ratings yet
- Acb Fault ReasonsDocument14 pagesAcb Fault ReasonsDakshinaMoorthyNo ratings yet
- LSS General Process FlowDocument3 pagesLSS General Process FlowAzree Mohd NoorNo ratings yet
- Optimization of Path Tracking RobotDocument5 pagesOptimization of Path Tracking Robotsyclops3No ratings yet
- Signals and Systems Course OverviewDocument9 pagesSignals and Systems Course OverviewSaurabh ANo ratings yet
- Course OutlineDocument3 pagesCourse OutlineSyed AsfandyarNo ratings yet
- Digital Communication Using GNU Radio - Unit 3 - Week 0Document3 pagesDigital Communication Using GNU Radio - Unit 3 - Week 0rensiNo ratings yet
- Digital Signals and Systems: Dr. Abdul Rahman El Falou BAUDocument54 pagesDigital Signals and Systems: Dr. Abdul Rahman El Falou BAUMahmoud AbdouNo ratings yet
- IESL General Qualifying Examination SyllabusDocument38 pagesIESL General Qualifying Examination SyllabusXiao ShadowlordNo ratings yet
- Digital Signal ProcessingDocument2 pagesDigital Signal Processingurvesh_patel440% (1)
- Term Paper XVI EED-323Document1 pageTerm Paper XVI EED-323Kanav MahajanNo ratings yet
- Ch2thru6 Dec2012Document336 pagesCh2thru6 Dec2012Frew Frew0% (1)
- DSP 18eel67 FinalDocument94 pagesDSP 18eel67 FinalBlackopsNo ratings yet
- Self Excited Periodic Motion in Underactuated Mechanical S - 2022 - Fuzzy Sets ADocument21 pagesSelf Excited Periodic Motion in Underactuated Mechanical S - 2022 - Fuzzy Sets AANDAHMOU SoulaimanNo ratings yet
- IIT Ropar EEL201 Signals and Systems Tutorial Sheet 3Document1 pageIIT Ropar EEL201 Signals and Systems Tutorial Sheet 3ShubhamMittalNo ratings yet
- Lab NoDocument8 pagesLab NoAli MohsinNo ratings yet
- Fourier Analysis Questions and Answers - SanfoundryDocument11 pagesFourier Analysis Questions and Answers - SanfoundrykshambelmekuyeNo ratings yet
- Gate Question Bank PDFDocument625 pagesGate Question Bank PDFmansi jagtapNo ratings yet
- Ma Kai-Kuang (Tutorial+Lectures)Document157 pagesMa Kai-Kuang (Tutorial+Lectures)Ang KhengNo ratings yet
- 29 - 4000 MCQ Electronics EngineeringDocument22 pages29 - 4000 MCQ Electronics EngineeringMahima mpNo ratings yet
- Information TechnologyDocument77 pagesInformation TechnologyNoble VargheseNo ratings yet
- Chapter 7 - StabilityDocument42 pagesChapter 7 - Stabilityvenosyah devanNo ratings yet
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiNo ratings yet
- Analog and Digital Signal ProcessingDocument821 pagesAnalog and Digital Signal Processingnowayjose666100% (15)
- Signals and Systems I (2016506) Tutorial 8Document4 pagesSignals and Systems I (2016506) Tutorial 8JohnCastañedaNo ratings yet
- The unit impulse function δ(t) is defined as:δ(t) = ∞, t = 0 0, t ≠ 0It has the property that: ∞ ∫−∞ f(t)δ(t) dt = f(0)Therefore, the answers are:C) g(0), g(0Document119 pagesThe unit impulse function δ(t) is defined as:δ(t) = ∞, t = 0 0, t ≠ 0It has the property that: ∞ ∫−∞ f(t)δ(t) dt = f(0)Therefore, the answers are:C) g(0), g(0Sumit KumarNo ratings yet
- EE-232 Signals and Systems Ver1.2 - Sp20Document4 pagesEE-232 Signals and Systems Ver1.2 - Sp20Skiwordy MediaNo ratings yet
- Power & Energy Signals Questions and Answers - SanfoundryDocument11 pagesPower & Energy Signals Questions and Answers - SanfoundrykshambelmekuyeNo ratings yet
- Ec 1361 Digital Signal ProcessingDocument11 pagesEc 1361 Digital Signal Processingpurushoth@aeroNo ratings yet
- Mnmjec - Ec6303 Signals & SystemsDocument25 pagesMnmjec - Ec6303 Signals & SystemsSonuNo ratings yet
- Digital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETDocument33 pagesDigital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETJamil RofiNo ratings yet