You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Vector Analysis (Continued) : EE 3513: Electromagnetic Fields and WavesDocument18 pagesVector Analysis (Continued) : EE 3513: Electromagnetic Fields and WavesAbdullah AbidNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Capital University of Science and Technology: Department of Electrical EngineeringDocument2 pagesCapital University of Science and Technology: Department of Electrical EngineeringAbdullah AbidNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Vector Analysis (Continued) : EE 2513: Electromagnetic Fields and WavesDocument12 pagesVector Analysis (Continued) : EE 2513: Electromagnetic Fields and WavesAbdullah AbidNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- EE 2513: Electromagnetic Fields and Waves: Grading Policy Course Overview Review of Vector CalculusDocument11 pagesEE 2513: Electromagnetic Fields and Waves: Grading Policy Course Overview Review of Vector CalculusAbdullah AbidNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Micro Assignment - 01Document3 pagesMicro Assignment - 01Abdullah AbidNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Health and Safety Training - DeclarationDocument2 pagesHealth and Safety Training - DeclarationAbdullah AbidNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Lab No. 04 ARM Assembly Programming Using Arithmetic InstructionsDocument16 pagesLab No. 04 ARM Assembly Programming Using Arithmetic InstructionsAbdullah AbidNo ratings yet
- This Study Resource Was Shared Via: Vector Analysis (Continued)Document7 pagesThis Study Resource Was Shared Via: Vector Analysis (Continued)Abdullah AbidNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- ODS Lab4 Fundamentals of Object-Oriented ProgrammingDocument20 pagesODS Lab4 Fundamentals of Object-Oriented ProgrammingAbdullah AbidNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Lecture 12Document28 pagesLecture 12Abdullah AbidNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Name: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateDocument6 pagesName: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateAbdullah AbidNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- #Include #Include Void Char Int Int: - CRT - Secure - No - WarningsDocument2 pages#Include #Include Void Char Int Int: - CRT - Secure - No - WarningsAbdullah AbidNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- #Include #Include #Include X Max MinDocument7 pages#Include #Include #Include X Max MinAbdullah AbidNo ratings yet
- English Semester 2Document7 pagesEnglish Semester 2Abdullah AbidNo ratings yet
- CRT - Secure - No - WarningsDocument2 pagesCRT - Secure - No - WarningsAbdullah AbidNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- PointDocument2 pagesPointAbdullah AbidNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- CAF Syllabus PDFDocument88 pagesCAF Syllabus PDFAbdullah AbidNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Task 01: #Include Int Int For ForDocument3 pagesTask 01: #Include Int Int For ForAbdullah AbidNo ratings yet
- Lab 1Document2 pagesLab 1Abdullah AbidNo ratings yet
- Lab 6Document3 pagesLab 6Abdullah AbidNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Name: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateDocument7 pagesName: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateAbdullah AbidNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Name: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateDocument4 pagesName: Reg.#: Course: Department: Section: Assignment#: Submitted To: Description: Submission DateAbdullah AbidNo ratings yet
- Assignment#04 Q#01: #Include #IncludeDocument5 pagesAssignment#04 Q#01: #Include #IncludeAbdullah AbidNo ratings yet
- #Include #Include: Struct Char Int Int Int Int Int Int Int Int IntDocument4 pages#Include #Include: Struct Char Int Int Int Int Int Int Int Int IntAbdullah AbidNo ratings yet
- Assignment#02 of CPDocument26 pagesAssignment#02 of CPAbdullah AbidNo ratings yet
- Assignment#05: #Include # Define A B A B A B A B A B A B A B A BDocument7 pagesAssignment#05: #Include # Define A B A B A B A B A B A B A B A BAbdullah AbidNo ratings yet
- Assignment#01 Od CPDocument17 pagesAssignment#01 Od CPAbdullah AbidNo ratings yet
- Exp 2Document4 pagesExp 2tahiaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- AIS 02-19 - Information Systems Operations & MaintenanceDocument8 pagesAIS 02-19 - Information Systems Operations & MaintenanceLiRose SmithNo ratings yet
- VNP28N04 E DatasheetzDocument11 pagesVNP28N04 E Datasheetzwawans6762No ratings yet
- 450 857 07 C44CL Memcom Otis REM6 Wiring Loom V02 MLDocument8 pages450 857 07 C44CL Memcom Otis REM6 Wiring Loom V02 MLsam11No ratings yet
- Best Lesson PlanDocument4 pagesBest Lesson Planapi-398545121No ratings yet
- Chapter 4Document67 pagesChapter 4longtran1191No ratings yet
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- Solution To Optimal Power Flow by PSODocument5 pagesSolution To Optimal Power Flow by PSOgallantprakashNo ratings yet
- Sca-Library Acquisition ProgramDocument9 pagesSca-Library Acquisition ProgramCindy Basilio PinedaNo ratings yet
- WDM Important Questions 1Document3 pagesWDM Important Questions 1PinkNo ratings yet
- Introduction To Vlsi Circuits and Systems John P UyemuraDocument1 pageIntroduction To Vlsi Circuits and Systems John P UyemuramgowtaamNo ratings yet
- Sub-GHz Wi-SUN Introduction v2.0Document37 pagesSub-GHz Wi-SUN Introduction v2.0Xiong ChwNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PRINCE2 Quality Management StrategyDocument3 pagesPRINCE2 Quality Management StrategysreenathNo ratings yet
- A380-LEVEL I - ATA 31 Indicating - Recording SystemsDocument70 pagesA380-LEVEL I - ATA 31 Indicating - Recording SystemsGuy100% (1)
- Rajesh Vasa - PHD ThesisDocument252 pagesRajesh Vasa - PHD Thesisrajeshvasa100% (1)
- Sample Exam Paper - ITC506-19Document5 pagesSample Exam Paper - ITC506-19AhmedNo ratings yet
- Information Security PolicyDocument16 pagesInformation Security Policymohammed oumerNo ratings yet
- MOOSE (Meta-Analyses of Observational Studies in Epidemiology) ChecklistDocument2 pagesMOOSE (Meta-Analyses of Observational Studies in Epidemiology) ChecklistNesru Ahmed AkkichuNo ratings yet
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
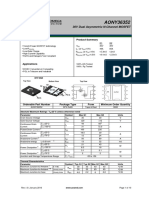
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocument10 pagesAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983No ratings yet
- GitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1Document1 pageGitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1shida67No ratings yet
- Fusion Forecourt SystemDocument8 pagesFusion Forecourt SystemOssama MarzoukNo ratings yet
- Haxm-Windows v6 0 1Document3 pagesHaxm-Windows v6 0 1Esteban David Ramírez EspinozaNo ratings yet
- Opentext Capture Recognition Engine Release NotesDocument15 pagesOpentext Capture Recognition Engine Release NotesHimanshi GuptaNo ratings yet
- Design of 400kV200kV SSDocument62 pagesDesign of 400kV200kV SSAbinav AggarwalNo ratings yet
- M.Des IIT Delhi Brochure PDFDocument22 pagesM.Des IIT Delhi Brochure PDFAnandu KBNo ratings yet
- Fintech PaperDocument16 pagesFintech PaperTarun kumar100% (1)
- Sentera Single Sensor User ManualDocument26 pagesSentera Single Sensor User ManualDwi WiraNo ratings yet
- TR01 - Introduction PDFDocument25 pagesTR01 - Introduction PDFRajNo ratings yet
- "Water Bottle Tracker": (For Water Refilling Stations)Document3 pages"Water Bottle Tracker": (For Water Refilling Stations)Rated SpgNo ratings yet
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingFrom EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet