You might also like
- Ijetae 1214 100Document5 pagesIjetae 1214 100akula pranathiNo ratings yet
- Detecting Alive Human Using Robot For Rescue OperationDocument7 pagesDetecting Alive Human Using Robot For Rescue OperationVIVA-TECH IJRINo ratings yet
- Zeroth Review FinalDocument15 pagesZeroth Review Finalthesahara7No ratings yet
- Abstract - Border SecurityDocument7 pagesAbstract - Border SecurityNikki NihalNo ratings yet
- Alive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotDocument4 pagesAlive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotrajatpreetNo ratings yet
- Military Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraDocument4 pagesMilitary Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Live Human Detection Robot: Asha Gupta Nidhee PanchalDocument5 pagesLive Human Detection Robot: Asha Gupta Nidhee PanchalrajatpreetNo ratings yet
- Rescue of Alive Human Being by An Autonomous Robot Using Pic MicrocontrollerDocument7 pagesRescue of Alive Human Being by An Autonomous Robot Using Pic MicrocontrollerAbdNo ratings yet
- IEEE Conf Paper HRRDocument4 pagesIEEE Conf Paper HRRemmy sayyedNo ratings yet
- All Terrain Rescue BotDocument14 pagesAll Terrain Rescue BotPinagani SurajNo ratings yet
- Base Paper - Human Detection Robot During Disaster ConditionDocument6 pagesBase Paper - Human Detection Robot During Disaster Conditionthesahara7No ratings yet
- Live Human Detection Robot: Asha Gupta Nidhee PanchalDocument5 pagesLive Human Detection Robot: Asha Gupta Nidhee PanchalThet Hmue Hay ThiNo ratings yet
- Military Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraDocument4 pagesMilitary Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Military Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraDocument4 pagesMilitary Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Military Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraDocument4 pagesMilitary Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Military Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraDocument4 pagesMilitary Surveillance Robot: Keywords:-Robot, Arduino Uno, Raspberry Pi, CameraInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IoT Based Smart Multi Application SurveillanceDocument5 pagesIoT Based Smart Multi Application SurveillanceVundi Sri Harsha100% (1)
- Review Paper On Search and Rescue Robot For Victims of Earthquake and Natural CalamitiesDocument4 pagesReview Paper On Search and Rescue Robot For Victims of Earthquake and Natural CalamitiesEditor IJRITCC100% (1)
- IOT Based Human Search and Rescue Robot Using Swarm RoboticsDocument6 pagesIOT Based Human Search and Rescue Robot Using Swarm RoboticsMayuresh SarodeNo ratings yet
- Surveillance Robot With Face Recognition Using Raspberry Pi IJERTV8IS120298Document5 pagesSurveillance Robot With Face Recognition Using Raspberry Pi IJERTV8IS120298e-park research centreNo ratings yet
- Night Vision ZerothDocument9 pagesNight Vision ZerothASHWINNo ratings yet
- Arduino Based Human Following Robot Using Ir Sensor DduDocument41 pagesArduino Based Human Following Robot Using Ir Sensor Dduseid juharNo ratings yet
- Ijresm V1 I11 50Document4 pagesIjresm V1 I11 50Devika GhadageNo ratings yet
- Surveillance Robotin Hazardous Placeusing Io TTechnologyDocument7 pagesSurveillance Robotin Hazardous Placeusing Io TTechnologypradi66554433No ratings yet
- Multiple Sensor Based Human Detection Robots A RevDocument17 pagesMultiple Sensor Based Human Detection Robots A RevVaibhav SrivastavaNo ratings yet
- Updated 1st ReviewDocument19 pagesUpdated 1st Reviewthesahara7No ratings yet
- First Review PPT Batch 9Document10 pagesFirst Review PPT Batch 9thesahara7No ratings yet
- A Review of Alive Human Detection During Calamity and Landmine Bomb Human Detection in War FieldsDocument6 pagesA Review of Alive Human Detection During Calamity and Landmine Bomb Human Detection in War FieldsIJRASETPublicationsNo ratings yet
- Alive Human Body Detection System Using An Mobile Autonomous RobotDocument5 pagesAlive Human Body Detection System Using An Mobile Autonomous RobotVundi Sri HarshaNo ratings yet
- Dtcjci 1Document11 pagesDtcjci 1aryanNo ratings yet
- Literature PaperDocument6 pagesLiterature PaperVignesh ANo ratings yet
- Batch-9 1st ReviewDocument19 pagesBatch-9 1st Reviewthesahara7No ratings yet
- 71 An Autonomous Surveillance Robot With IoT Based Rescue System Enhancement-3290-EEE - Hasan MahmudDocument6 pages71 An Autonomous Surveillance Robot With IoT Based Rescue System Enhancement-3290-EEE - Hasan MahmudaryanNo ratings yet
- Sanitization RobotDocument5 pagesSanitization Robotramya adariNo ratings yet
- Developing and Using An IOT-Powered Adaptive Device For The MilitaryDocument4 pagesDeveloping and Using An IOT-Powered Adaptive Device For The MilitaryInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IOT Asset Tracking System: Indira R, Bhavya G, Dheva Dharshini S, Devaraj R Assistant Professor, StudentDocument6 pagesIOT Asset Tracking System: Indira R, Bhavya G, Dheva Dharshini S, Devaraj R Assistant Professor, Studenttherow anglesNo ratings yet
- Voice Assisted Smart E-Cane For The Visually Challenged Using Machine LearningDocument13 pagesVoice Assisted Smart E-Cane For The Visually Challenged Using Machine LearningIJRASETPublicationsNo ratings yet
- Image Classification and Object Following Functions For Mobile RobotsDocument10 pagesImage Classification and Object Following Functions For Mobile RobotsIJRASETPublicationsNo ratings yet
- Report 2Document48 pagesReport 2Sushmitha R. S - 111No ratings yet
- Farm Land Dangerous Radiation Material Detection Robot - 2Document7 pagesFarm Land Dangerous Radiation Material Detection Robot - 2aminuNo ratings yet
- A Domestic Robot For Security Systems by Video Surveillance Using Zigbee TechnologyDocument6 pagesA Domestic Robot For Security Systems by Video Surveillance Using Zigbee TechnologyEditor IJSETNo ratings yet
- "Smart Scarecrow": Presentation OnDocument15 pages"Smart Scarecrow": Presentation Oniot forumNo ratings yet
- Remote Surveillance of Enclosed and Open Architectures Using Unmanned Vehicle With Advanced SecurityDocument7 pagesRemote Surveillance of Enclosed and Open Architectures Using Unmanned Vehicle With Advanced SecurityIJRES teamNo ratings yet
- Project - Fire Detection and Extinguishing RobotDocument16 pagesProject - Fire Detection and Extinguishing RobotRakesh SNo ratings yet
- Human Detection Robot For Natural Calamity Rescue Operation - 2019Document5 pagesHuman Detection Robot For Natural Calamity Rescue Operation - 2019Pratik GadilkarNo ratings yet
- Impacts of Emerging TechnologiesDocument3 pagesImpacts of Emerging TechnologieskumNo ratings yet
- Security Measures For Crops and Domestic Animals Using CNNDocument6 pagesSecurity Measures For Crops and Domestic Animals Using CNNInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ijarcce2h A Seetha RescueDocument5 pagesIjarcce2h A Seetha RescuehidaiNo ratings yet
- Interactive Humanoid RobotDocument4 pagesInteractive Humanoid RobotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Multipurpose Military Spying and Bomb Detection MachineDocument4 pagesMultipurpose Military Spying and Bomb Detection MachineInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Web and Speech Controlled Video Surviellance RobotDocument8 pagesWeb and Speech Controlled Video Surviellance RobotIJRASETPublicationsNo ratings yet
- Alive human-IEEE PDFDocument5 pagesAlive human-IEEE PDFmerrinNo ratings yet
- Project Title: Wildlife Observation RobotDocument13 pagesProject Title: Wildlife Observation RobotVishal LabdeNo ratings yet
- SecuritypatrolrobotDocument7 pagesSecuritypatrolrobotVinay InavoluNo ratings yet
- It 8811 - Project Work: Live Human Detection Robot in Disaster Conditions Using IotDocument10 pagesIt 8811 - Project Work: Live Human Detection Robot in Disaster Conditions Using Iotthesahara7No ratings yet
- Security Robot and SurveillanceDocument10 pagesSecurity Robot and SurveillanceIJRASETPublicationsNo ratings yet
- Velagapudi Ramakrishna Siddhartha Engineering College: Title: Crop Protection From Animal Attacks Using IOT AbstractDocument3 pagesVelagapudi Ramakrishna Siddhartha Engineering College: Title: Crop Protection From Animal Attacks Using IOT Abstractboogeyman19980No ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 3)From EverandRobot Operating System (ROS): The Complete Reference (Volume 3)No ratings yet
- Link Budget CalculatorDocument13 pagesLink Budget CalculatorYounesNo ratings yet
- MATLAB Simulation Comparison MIMO-SVD and MIMO-SMDocument9 pagesMATLAB Simulation Comparison MIMO-SVD and MIMO-SMahmedmalekNo ratings yet
- Odi3-065r18j-Gq DS 0-T-7Document2 pagesOdi3-065r18j-Gq DS 0-T-7KonstantinNo ratings yet
- A-00 Introduction To The Turnkey Project Implementation ProcessDocument15 pagesA-00 Introduction To The Turnkey Project Implementation ProcessMuhammad AsimNo ratings yet
- CSC 111 Introduction To Computer ScienceDocument70 pagesCSC 111 Introduction To Computer ScienceLawalNo ratings yet
- Technical Guide To LTE PRACH ZC Root Sequence PlanningDocument67 pagesTechnical Guide To LTE PRACH ZC Root Sequence PlanningfastlinkNo ratings yet
- RadarDocument15 pagesRadarShrey JainNo ratings yet
- DWR-961 REVD DATASHEET v1.00 VERIZONDocument2 pagesDWR-961 REVD DATASHEET v1.00 VERIZONJohnNo ratings yet
- A.understanding MW LinkDocument82 pagesA.understanding MW LinkKamal Dammika Jayarathne100% (2)
- Db878g60a XyDocument2 pagesDb878g60a XyИван ФиличевNo ratings yet
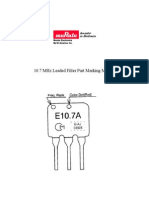
- Murata 10.7 Filter Markings DatasheetDocument7 pagesMurata 10.7 Filter Markings Datasheethector.pascal578No ratings yet
- Ubiquiti NanoStation AC DSDocument9 pagesUbiquiti NanoStation AC DSIni HNo ratings yet
- GSM IDocument5 pagesGSM Ishubhu11No ratings yet
- Cell Planning PrinciplesDocument109 pagesCell Planning PrinciplesPrashant PatkeNo ratings yet
- Analog and Digital Communication-Course Strength Session: Ezhilazhahi - AM (Asst - Prof) ECE dept-ACTDocument25 pagesAnalog and Digital Communication-Course Strength Session: Ezhilazhahi - AM (Asst - Prof) ECE dept-ACTEzhil Azhahi.AM Assistant ProfessorNo ratings yet
- Lateration and Signal StrengthDocument6 pagesLateration and Signal StrengthNicoli LourençoNo ratings yet
- Communication System For On Board Data Telemetry To Ground.Document26 pagesCommunication System For On Board Data Telemetry To Ground.Engr Waqar Ahmed RajputNo ratings yet
- SralDocument20 pagesSralMarius-Laurentiu MogaNo ratings yet
- WRFU HuaweiDocument4 pagesWRFU Huaweisandy_arisandy67% (3)
- Shopping Mall Case Study NOV 24 2015Document20 pagesShopping Mall Case Study NOV 24 2015cyo3fff100% (1)
- R Rec M.1371 5 201402 I!!pdf eDocument148 pagesR Rec M.1371 5 201402 I!!pdf ehuryNo ratings yet
- DCT Ans Radio HelDocument31 pagesDCT Ans Radio HelAE Flt BSR100% (1)
- Homeworks Qs Wiring GuidelinesDocument18 pagesHomeworks Qs Wiring Guidelinessieucongan911No ratings yet
- OFDMDocument51 pagesOFDMMuhammad AzwirNo ratings yet
- SR# Call Type A-Party B-Party Date & Time Duration Cell ID ImeiDocument12 pagesSR# Call Type A-Party B-Party Date & Time Duration Cell ID ImeiSaifullah BalochNo ratings yet
- ProjectDocument40 pagesProjectLeul SeyfuNo ratings yet
- 05 Amplitude Modulation AM DemodulationDocument8 pages05 Amplitude Modulation AM DemodulationWafula DerrickNo ratings yet
- Radio User 2018 006 - JuniDocument76 pagesRadio User 2018 006 - JuniAl KNo ratings yet
- Zte Ax326 Wimax Usb Modem Spec v1.0Document11 pagesZte Ax326 Wimax Usb Modem Spec v1.0Ramiz RzaogluNo ratings yet
- Picocell Mesh: Bringing Low-Cost Coverage, Capacity and Symmetry To Mobile WimaxDocument16 pagesPicocell Mesh: Bringing Low-Cost Coverage, Capacity and Symmetry To Mobile WimaxPurna Prasad.vNo ratings yet