You might also like
- How To Make Electrical Machines Containing Full Directions For Making Electrical Machines Induction Coils Dynamos and Many Novel Toys To Be Worked by Electricity 2Document101 pagesHow To Make Electrical Machines Containing Full Directions For Making Electrical Machines Induction Coils Dynamos and Many Novel Toys To Be Worked by Electricity 2GACEM ABDELKRIMNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Unit 2 & 3 EM-I (REE 402) : DC MachinesDocument48 pagesUnit 2 & 3 EM-I (REE 402) : DC MachinesAnanya Srivastava100% (1)
- US Navy Course NAVEDTRA 14323 - Aviation Electricity & Electronics - Power Generation & DistributDocument54 pagesUS Navy Course NAVEDTRA 14323 - Aviation Electricity & Electronics - Power Generation & DistributGeorges100% (1)
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- DC Motors: - Construction Very Similar To A DC GeneratorDocument35 pagesDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- REFRIGERADOR Samsung-Rt38k5930s8-Manual-De-UsuarioDocument84 pagesREFRIGERADOR Samsung-Rt38k5930s8-Manual-De-UsuarioCarlos Arias Luyando100% (1)
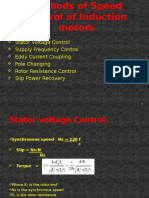
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- Experiment-1 Speed Control of DC Motor Using Matlab SimulinkDocument4 pagesExperiment-1 Speed Control of DC Motor Using Matlab Simulinksameerpatel15770No ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Speed Control of Induction MotorDocument26 pagesSpeed Control of Induction MotorrajasekaranNo ratings yet
- Synchronouus MachinesElectrical Machines - 526-746Document221 pagesSynchronouus MachinesElectrical Machines - 526-746HulkNo ratings yet
- DC Drives PDFDocument90 pagesDC Drives PDFkeerthi50% (2)
- Solved Examples in Synchronous Machines: Sheet 5Document6 pagesSolved Examples in Synchronous Machines: Sheet 5Bradley Da Silva100% (1)
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- Brush Dax Generadores Dax - 2 - PoleDocument4 pagesBrush Dax Generadores Dax - 2 - PoleHernan GirautNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Basics of Alternator PDFDocument166 pagesBasics of Alternator PDFWijarn Wangdee100% (1)
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- Chap 10 Part IIDocument5 pagesChap 10 Part IITynoh MusukuNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItDocument39 pagesA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaNo ratings yet
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomeNo ratings yet
- Unit-IV Speed Control of Induction Motor On Rotor SideDocument8 pagesUnit-IV Speed Control of Induction Motor On Rotor SideMohammed MateenNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Starting & Speeed Control of Three Phase Induction MotorsDocument9 pagesStarting & Speeed Control of Three Phase Induction MotorsAshutoshNo ratings yet
- Speed Control of DC Motor Using PWMDocument23 pagesSpeed Control of DC Motor Using PWMSunitha MaryNo ratings yet
- Lab 11 (Hardware Practice) PDFDocument7 pagesLab 11 (Hardware Practice) PDFzeeshan shaukatNo ratings yet
- Direct Current Motor: UNIT-9Document19 pagesDirect Current Motor: UNIT-9Keshav RathiNo ratings yet
- Ac Generator 2Document22 pagesAc Generator 2Gilian Joy Mari PerezNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking MethodsRukkuArunNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- Ed File SID 266Document31 pagesEd File SID 266Siddartha AggarwalNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Speed Control of IMDDocument21 pagesSpeed Control of IMDSenpai TashiNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Karakteristik Motor KomponDocument14 pagesKarakteristik Motor KomponPola RismaNo ratings yet
- Power Semi Conductor DrivesDocument2 pagesPower Semi Conductor DrivesmanideepNo ratings yet
- Speed Control of DC MotorsDocument27 pagesSpeed Control of DC MotorsBabuKannanNo ratings yet
- Ec-I Lab MannualDocument30 pagesEc-I Lab Mannualsmaran247017No ratings yet
- Gas Turbine Generator: Chapter-7Document6 pagesGas Turbine Generator: Chapter-7GAGANNo ratings yet
- Investigate The DC Motor CharacteristicDocument7 pagesInvestigate The DC Motor CharacteristicAhmar KhanNo ratings yet
- PSBD Unit 3 Page No 95Document8 pagesPSBD Unit 3 Page No 95Vishal BhatNo ratings yet
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065No ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- 2 Lva1 App6891Document13 pages2 Lva1 App6891gouravNo ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- Experiment 2Document4 pagesExperiment 2dhruvmistry300No ratings yet
- PX5202 - SSDC Question BankDocument21 pagesPX5202 - SSDC Question BankRoja50% (2)
- Unit V: DC MotorsDocument28 pagesUnit V: DC Motorskrishnareddy_chintalaNo ratings yet
- Single Phase Semi ConverterDocument18 pagesSingle Phase Semi Convertermohamed enanyNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Experiment N0 - 2Document4 pagesExperiment N0 - 2Hapijul SanfuiNo ratings yet
- Sheet 2Document4 pagesSheet 2geo_biNo ratings yet
- Slip RecoveryDocument26 pagesSlip RecoverySrdjan MilosavljevicNo ratings yet
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDocument6 pagesVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQNo ratings yet
- Subject: Electric Drives & Traction Topic: Rotor Resistance Control of 3-Ø Induction MotorDocument3 pagesSubject: Electric Drives & Traction Topic: Rotor Resistance Control of 3-Ø Induction MotorImran JamadarNo ratings yet
- DC Machine 2014 2Document9 pagesDC Machine 2014 2Seb TegNo ratings yet
- Power Semi Conductor Drives: IV B.Tech., I-SemesterDocument24 pagesPower Semi Conductor Drives: IV B.Tech., I-Semestermanideep0% (1)
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniNo ratings yet
- EXPERIMENT Induction MotorDocument10 pagesEXPERIMENT Induction MotorMohamed Meeran100% (1)
- Control of Induction MotorsDocument9 pagesControl of Induction MotorsLaurence MichaelNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- IL55B/ 56B/ MOC8021: Optocoupler, Photodarlington Output, High GainDocument6 pagesIL55B/ 56B/ MOC8021: Optocoupler, Photodarlington Output, High GainCarlos Arias LuyandoNo ratings yet
- 802.11g ADSL2+ Firewall RouterDocument2 pages802.11g ADSL2+ Firewall RouterCarlos Arias LuyandoNo ratings yet
- P400 Series: Passivated Assembled Circuit ElementsDocument8 pagesP400 Series: Passivated Assembled Circuit ElementsCarlos Arias LuyandoNo ratings yet
- Actuators: Pneumatic, Electric and Electrohydraulic Actuators For Control Valves and Butterfly ValvesDocument8 pagesActuators: Pneumatic, Electric and Electrohydraulic Actuators For Control Valves and Butterfly ValvesCarlos Arias LuyandoNo ratings yet
- And These Newspapers Rely On Fincor Automation DrivesDocument2 pagesAnd These Newspapers Rely On Fincor Automation DrivesCarlos Arias LuyandoNo ratings yet
- Model Kbsi-240D: Installation and Operating InstructionsDocument16 pagesModel Kbsi-240D: Installation and Operating InstructionsCarlos Arias LuyandoNo ratings yet
- Ravi DocumentDocument41 pagesRavi DocumentRavikiran Le-333No ratings yet
- Lap Winding Wave Winding and Construction of DC MachineDocument23 pagesLap Winding Wave Winding and Construction of DC Machineahmed Alanazi100% (1)
- Jto QuestionsDocument246 pagesJto Questionsanirudha0012No ratings yet
- Physics 12th AC Generator PDFDocument17 pagesPhysics 12th AC Generator PDFluckyNo ratings yet
- Physics Trial 2013 - JRAHS - QuestionsDocument25 pagesPhysics Trial 2013 - JRAHS - QuestionsLisWeiNo ratings yet
- Using The GrowlerDocument8 pagesUsing The GrowlerpeterNo ratings yet
- Maintenance Book1Document200 pagesMaintenance Book1rakesh ranjanNo ratings yet
- Science: Quarter 2 - Module 17Document22 pagesScience: Quarter 2 - Module 17Kyhiro RajNo ratings yet
- BASIC ELECTRICAL ENGINEERING Module 4Document23 pagesBASIC ELECTRICAL ENGINEERING Module 4cinema masterNo ratings yet
- Electrical QuestionsDocument122 pagesElectrical QuestionsBiju Mathson MathewNo ratings yet
- Steady State Analysis of Synch To No UsDocument4 pagesSteady State Analysis of Synch To No UsJara FeyisaNo ratings yet
- Stator MotorDocument8 pagesStator MotorMPENDULO MABILANo ratings yet
- OVR-3 Instruction Bulletin Rev D 1VAL264001-MBDocument26 pagesOVR-3 Instruction Bulletin Rev D 1VAL264001-MBjcamargo.exselectricNo ratings yet
- Ghazi Barotha Hydropower Project (GBHP) : Water & Power Development AuthoriyDocument43 pagesGhazi Barotha Hydropower Project (GBHP) : Water & Power Development AuthoriyHayat YousafzaiNo ratings yet
- Electrical Machine - Ga - 1Document8 pagesElectrical Machine - Ga - 1rahulmeenameenarahul26No ratings yet
- EXP 1-9 FinalDocument28 pagesEXP 1-9 FinalMonika KanojiaNo ratings yet
- II Mech - 03 - EE8353 - EDC - Unit 4 PDFDocument5 pagesII Mech - 03 - EE8353 - EDC - Unit 4 PDFPraveena GopiNo ratings yet
- Electric MotorsDocument25 pagesElectric MotorsGular JabrayilovaNo ratings yet
- Eec 233 Theory PDFDocument75 pagesEec 233 Theory PDFIfada LibertyNo ratings yet
- DC MachineDocument33 pagesDC MachineAnu PrakashNo ratings yet
- CGR Training ReportDocument22 pagesCGR Training ReportLakshan Walpita67% (6)
- Cycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorDocument4 pagesCycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorVIJAY KUMARNo ratings yet
- Question 1: As Shown in Figure 1. A 6-Pole, Long-Shunt Lap-Wound CompoundDocument4 pagesQuestion 1: As Shown in Figure 1. A 6-Pole, Long-Shunt Lap-Wound Compoundالموعظة الحسنه chanelNo ratings yet