You might also like
- Building Controls VI TranscrptDocument9 pagesBuilding Controls VI TranscrptirwanNo ratings yet
- Building Controls I - An Introduction To Building Controls-TranscriptDocument11 pagesBuilding Controls I - An Introduction To Building Controls-Transcriptjacksonli100% (1)
- Building Controls IV TranscriptDocument8 pagesBuilding Controls IV TranscriptirwanNo ratings yet
- User's Manual B202Document12 pagesUser's Manual B202Aswa Tama100% (2)
- TEE 451 - Control Systems Lab 2 Temperature ControlDocument3 pagesTEE 451 - Control Systems Lab 2 Temperature ControlVu LeNo ratings yet
- Eco VDocument47 pagesEco Vfiguera20No ratings yet
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopNo ratings yet
- IoT2x Module 4 PID ActivityDocument5 pagesIoT2x Module 4 PID Activityvanishree raNo ratings yet
- PID Made Simple ExplainedDocument8 pagesPID Made Simple ExplainedJim ElliottNo ratings yet
- Pid ExplainedDocument4 pagesPid ExplainedShiva Sai BuraNo ratings yet
- HVAC Characteristics of Air TranscriptDocument20 pagesHVAC Characteristics of Air TranscriptEmad Mohamed Sofy AminNo ratings yet
- Fuzzy Logic Control of Air ConditionersDocument14 pagesFuzzy Logic Control of Air ConditionersGanesh RamNo ratings yet
- CS LabReport 9Document13 pagesCS LabReport 9Muhammad AfzaalNo ratings yet
- PID Controllers Explained: Jacques Smuts, PH.DDocument4 pagesPID Controllers Explained: Jacques Smuts, PH.Djenix105No ratings yet
- 9702 HVAC System Trend AnalysisDocument7 pages9702 HVAC System Trend AnalysisBrianNo ratings yet
- Control Design - How To Tune LoopsDocument34 pagesControl Design - How To Tune LoopsBossNo ratings yet
- PID ControllerDocument20 pagesPID ControlleramitbslpawarNo ratings yet
- 01.anatomy of A Feedback Control SystemDocument8 pages01.anatomy of A Feedback Control SystemMahesh GonuguntlaNo ratings yet
- VIVAX Cool 2014 PDFDocument36 pagesVIVAX Cool 2014 PDFFeritFazliu100% (1)
- Manual tm-10098 Rev 05-27-08Document203 pagesManual tm-10098 Rev 05-27-08Alhgasjsghjagjsdajlsd Asdalsdlkaksd100% (1)
- Techteach - No Simview Antiwindup IndexDocument2 pagesTechteach - No Simview Antiwindup IndexDiabloNo ratings yet
- Closed Loop Hydraulic Actuatormodelforrealtimesimulationwith PIDPart 2Document29 pagesClosed Loop Hydraulic Actuatormodelforrealtimesimulationwith PIDPart 2marcos Ojeda GomezNo ratings yet
- Project Report: Temperature Measurement Using Personal Computer (PC)Document14 pagesProject Report: Temperature Measurement Using Personal Computer (PC)Poulomi MukherjeeNo ratings yet
- Project Report: Temperature Measurement Using Personal Computer (PC)Document14 pagesProject Report: Temperature Measurement Using Personal Computer (PC)Poulomi MukherjeeNo ratings yet
- Motor Control Lab ReportDocument4 pagesMotor Control Lab ReportVu LeNo ratings yet
- Automatic Control of Air Conditioner Using FUZZY LOZICDocument6 pagesAutomatic Control of Air Conditioner Using FUZZY LOZICRaghavendra RaghavNo ratings yet
- PID Controller For Heating Resistive ElementDocument8 pagesPID Controller For Heating Resistive Elementviteliof4110No ratings yet
- Ic 2003Document21 pagesIc 2003Dinesh KumarNo ratings yet
- EPP - 10 - Control of SystemsDocument6 pagesEPP - 10 - Control of SystemsLynn TehNo ratings yet
- Report Energy Management Systems WebinarDocument4 pagesReport Energy Management Systems WebinarAlfi Al FahreizyNo ratings yet
- Programming the PIC 13 PIC Basic Pro LessonsDocument12 pagesProgramming the PIC 13 PIC Basic Pro LessonsveerakumarsNo ratings yet
- ChE 5105 Group Experiment on PID Temperature ControlDocument10 pagesChE 5105 Group Experiment on PID Temperature ControlStephanie SomongcadNo ratings yet
- Intelligent Home Heating SystemDocument4 pagesIntelligent Home Heating SystemInternational Journal of Research in Engineering and TechnologyNo ratings yet
- CS LabReport 8Document10 pagesCS LabReport 8Muhammad AfzaalNo ratings yet
- Ramp and Soak ApplicationsDocument3 pagesRamp and Soak ApplicationsHayden Lovett100% (5)
- PID Control Tutorial - Yokogawa AmericaDocument3 pagesPID Control Tutorial - Yokogawa AmericalorenzoNo ratings yet
- PID Control Without Math: The Darker Side by Robert LacosteDocument7 pagesPID Control Without Math: The Darker Side by Robert LacosteNae GoguNo ratings yet
- Report On Pid ControllerDocument14 pagesReport On Pid Controllersura samirNo ratings yet
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- AN20 PID Control LoopsDocument11 pagesAN20 PID Control Loopsmazaher karamiNo ratings yet
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocument39 pagesAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNo ratings yet
- Temperature Control Using PID SimulatorDocument6 pagesTemperature Control Using PID SimulatorArkam AliNo ratings yet
- Closed Loop SystemsDocument11 pagesClosed Loop SystemsMohamed RashidNo ratings yet
- Intelligent Home Heating SystemDocument4 pagesIntelligent Home Heating Systemesatjournals0% (1)
- Courseware Sample by Lab-VoltDocument24 pagesCourseware Sample by Lab-VoltiedmondNo ratings yet
- Hvac Controls - Invensys: J.IlangumaranDocument62 pagesHvac Controls - Invensys: J.Ilangumaranapi-25999517No ratings yet
- Examining The Fundamentals of PID ControlDocument7 pagesExamining The Fundamentals of PID ControlbariNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- Fuzzy Logic Controller For AirconDocument8 pagesFuzzy Logic Controller For AirconEvan SumidoNo ratings yet
- Fired Heater SimulatorDocument11 pagesFired Heater SimulatorNimeshKamatNo ratings yet
- Lecture - PID ControllerDocument30 pagesLecture - PID ControllerCyril Felix100% (1)
- A Novel Air Conditioner For Smart Grid Applications: Sukhraj S. Cheema, S.K. JainDocument3 pagesA Novel Air Conditioner For Smart Grid Applications: Sukhraj S. Cheema, S.K. JainragvshahNo ratings yet
- Introduction To PID ControlDocument6 pagesIntroduction To PID ControlIonescu ViorelNo ratings yet
- Control Systems Background - The Regulation ProblemDocument19 pagesControl Systems Background - The Regulation ProblemHilmy Pramuditya FhansuriNo ratings yet
- IES Virtual Environment Training on ApacheHVAC VE 2015 Session B SI unitsDocument59 pagesIES Virtual Environment Training on ApacheHVAC VE 2015 Session B SI unitsKa Hung LeungNo ratings yet
- Plagiarism Checker X Originality: Similarity Found: 58%Document9 pagesPlagiarism Checker X Originality: Similarity Found: 58%Junaid AnwarNo ratings yet
- Intelligent Home Heating SystemDocument4 pagesIntelligent Home Heating SystemInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Virtualization The Engine Behind Cloud Computing TranscriptDocument21 pagesVirtualization The Engine Behind Cloud Computing Transcriptfernanda boldtNo ratings yet
- Waste Heat Recovery TranscriptDocument22 pagesWaste Heat Recovery Transcriptfernanda boldtNo ratings yet
- WP55R3Document9 pagesWP55R3fernanda boldtNo ratings yet
- Lecture-1-Basics of Power Electronic ComponentsDocument11 pagesLecture-1-Basics of Power Electronic Componentsfernanda boldtNo ratings yet
- Virtualization The Engine Behind Cloud Computing TranscriptDocument21 pagesVirtualization The Engine Behind Cloud Computing Transcriptfernanda boldtNo ratings yet
- Data / Input Value Comments: High-Density Zone - Worksheet and ChecklistDocument2 pagesData / Input Value Comments: High-Density Zone - Worksheet and Checklistfernanda boldtNo ratings yet
- WP55R3Document9 pagesWP55R3fernanda boldtNo ratings yet
- Data / Input Value Comments: High-Density Zone - Worksheet and ChecklistDocument2 pagesData / Input Value Comments: High-Density Zone - Worksheet and Checklistfernanda boldtNo ratings yet
- Waste Heat Recovery TranscriptDocument22 pagesWaste Heat Recovery Transcriptfernanda boldtNo ratings yet
- High Density Planning For Integrating Blade Servers Into Exisiting Data Centers TranscriptDocument13 pagesHigh Density Planning For Integrating Blade Servers Into Exisiting Data Centers Transcriptfernanda boldtNo ratings yet
- Establishing Benchmarks For Data Center Efficiency Measurements TranscriptDocument22 pagesEstablishing Benchmarks For Data Center Efficiency Measurements Transcriptfernanda boldtNo ratings yet
- EPS Testing Chart Schneider Electric UniversityDocument3 pagesEPS Testing Chart Schneider Electric Universityfernanda boldtNo ratings yet
- Establishing Benchmarks For Data Center Efficiency Measurements TranscriptDocument22 pagesEstablishing Benchmarks For Data Center Efficiency Measurements Transcriptfernanda boldtNo ratings yet
- EPS Testing Chart Schneider Electric UniversityDocument3 pagesEPS Testing Chart Schneider Electric Universityfernanda boldtNo ratings yet
- How DCIM Software Improves Planning and Cuts Cost TranscriptDocument22 pagesHow DCIM Software Improves Planning and Cuts Cost Transcriptfernanda boldtNo ratings yet
- HVAC and Psychrometric Charts SI TranscriptDocument15 pagesHVAC and Psychrometric Charts SI TranscriptLaptuca GabrielNo ratings yet
- High Efficiency Economizer-Based Cooling Modules For Large Data Centers TranscriptDocument17 pagesHigh Efficiency Economizer-Based Cooling Modules For Large Data Centers Transcriptfernanda boldtNo ratings yet
- Emittance Data of Commonly Used MaterialsDocument1 pageEmittance Data of Commonly Used Materialsfernanda boldtNo ratings yet
- Compressed Air V: Efficient Management and UtilizationDocument1 pageCompressed Air V: Efficient Management and Utilizationfernanda boldtNo ratings yet
- Heat Loss Chart SnaiderDocument1 pageHeat Loss Chart SnaiderBahtiar YudhistiraNo ratings yet
- Heat Loss From Bare Steel Pipe To StillDocument1 pageHeat Loss From Bare Steel Pipe To Stillfernanda boldtNo ratings yet
- Heat Loss ChartsDocument1 pageHeat Loss ChartsJulio RicardoNo ratings yet
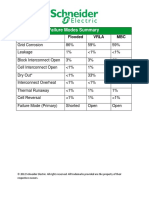
- Failure Modes Summary: Reason Flooded Vrla MBCDocument1 pageFailure Modes Summary: Reason Flooded Vrla MBCfernanda boldtNo ratings yet
- General Cables EgyptDocument157 pagesGeneral Cables Egyptfernanda boldtNo ratings yet
- Heat Loss ChartsDocument1 pageHeat Loss ChartsJulio RicardoNo ratings yet
- Battery Installation: MBC Vrla FloodedDocument1 pageBattery Installation: MBC Vrla Floodedfernanda boldtNo ratings yet
- Sheet 1: Fig. 1 Fig. 2Document1 pageSheet 1: Fig. 1 Fig. 2fernanda boldtNo ratings yet
- Battery System Costs 400 KWDocument1 pageBattery System Costs 400 KWfernanda boldtNo ratings yet
- Battery System Costs 400 KWDocument1 pageBattery System Costs 400 KWfernanda boldtNo ratings yet
- Battery System Costs 400 KWDocument1 pageBattery System Costs 400 KWfernanda boldtNo ratings yet
- CaffeineDocument2 pagesCaffeineSaini Malkeet100% (1)
- BSNL Cda RulesDocument3 pagesBSNL Cda RulesAlexander MccormickNo ratings yet
- Late 18th and Early 19thDocument82 pagesLate 18th and Early 19thGrace CordelinNo ratings yet
- Mil STD 1365bDocument49 pagesMil STD 1365bprakki123No ratings yet
- WWII 2nd Army HistoryDocument192 pagesWWII 2nd Army HistoryCAP History Library100% (1)
- TheoryDocument34 pagesTheoryPrashant SahNo ratings yet
- 9 Measures of Variability DisperseDocument14 pages9 Measures of Variability DisperseSourabh ChavanNo ratings yet
- Solutions Manual To Accompany A Second Course in Statistics Regression Analysis 7th Edition 0321691695Document23 pagesSolutions Manual To Accompany A Second Course in Statistics Regression Analysis 7th Edition 0321691695DonnaLopezysned100% (36)
- The Tibetan Weather Magic Ritual of A MoDocument13 pagesThe Tibetan Weather Magic Ritual of A MoYORDIS PCNo ratings yet
- Unit 10 Conic Sections ProjectDocument8 pagesUnit 10 Conic Sections Projectapi-290873974No ratings yet
- How To Cook Indian: More Than 500 Classic Recipes For The Modern KitchenDocument431 pagesHow To Cook Indian: More Than 500 Classic Recipes For The Modern Kitchenbingoteam100% (1)
- Chapter 3 The Life of Jose Rizal PDFDocument11 pagesChapter 3 The Life of Jose Rizal PDFMelanie CaplayaNo ratings yet
- Method of Statement For ELV SystemDocument7 pagesMethod of Statement For ELV SystemKo ZayNo ratings yet
- Jane Austen's Literary StyleDocument4 pagesJane Austen's Literary StyleGulfam RashidNo ratings yet
- Popular Telugu Novel "Prema DeepikaDocument2 pagesPopular Telugu Novel "Prema Deepikasindhu60% (5)
- Mrs. Dunia Halawi HarbDocument18 pagesMrs. Dunia Halawi HarbsallykamareddineNo ratings yet
- Lesson 10 - Classfying Food and Drink OperationsDocument25 pagesLesson 10 - Classfying Food and Drink OperationsRyl SorianoNo ratings yet
- Body PlanesDocument32 pagesBody PlanesStefanny Paramita EupenaNo ratings yet
- Shahrzadgh InquiryassignmentDocument5 pagesShahrzadgh Inquiryassignmentapi-274076411No ratings yet
- Barrett Preliminary Injunction in 'Heartbeat Bill' CaseDocument12 pagesBarrett Preliminary Injunction in 'Heartbeat Bill' CaseCincinnatiEnquirerNo ratings yet
- Advanced Engineering Mathematics 10th EditionDocument7 pagesAdvanced Engineering Mathematics 10th EditionsamuelNo ratings yet
- Margie's Group Travel Presents The Sparks Rebellion 1855-1857Document12 pagesMargie's Group Travel Presents The Sparks Rebellion 1855-1857fcmitcNo ratings yet
- Underwater Cutting and Welding Equipment - 89250054 - AbDocument38 pagesUnderwater Cutting and Welding Equipment - 89250054 - AbAhmed Adel100% (1)
- Introduction 130407092142 Phpapp01Document69 pagesIntroduction 130407092142 Phpapp01Pari Savla100% (1)
- Rebels - in - Frills - A - Literature - Review - On 4Document93 pagesRebels - in - Frills - A - Literature - Review - On 4mariobogarinNo ratings yet
- Henry D. Solatorio Jr. NCM 105: Promote Good Blood Sugar (Glucose) LevelsDocument2 pagesHenry D. Solatorio Jr. NCM 105: Promote Good Blood Sugar (Glucose) LevelsCristoper BodionganNo ratings yet
- Quiz On Digestive SystemDocument2 pagesQuiz On Digestive Systemacademic purposesNo ratings yet
- Quotes by Swami VivekanandaDocument6 pagesQuotes by Swami Vivekanandasundaram108No ratings yet
- Tower Scientific CompanyDocument3 pagesTower Scientific Companymaloy0% (1)
- Marine Environmental ResearchDocument11 pagesMarine Environmental ResearchPierre Otoniel Carmen MunaycoNo ratings yet